

Їх корені утворюють вектор полюсів та вектор нулів.
Скалярній передавальній функції (4.10) відповідає різницеве рівняння
![]()
![]() .
.
Використовуючи розкладення поліномів у чисельнику та знаменнику передавальної функції (4.9) на множники, отримуємо
![]() ,
,
![]() .(4.11)
.(4.11)
4.2 Відомості про блоки бібліотеки Discrete програми Simulink
У цю бібліотеку, представлену на рис. 4.1, входять дискретний інтегратор, екстраполятори, ланка запізнювання на період дискретності і дискретні динамічні ланки загального виду з різними способами їхнього математичного опису.
Усі ці
блоки мають у діалоговому вікні введення
параметрів поле з ім'ям Sample
Time.
Правила визначення цього параметру,
який керує моментами зміни вихідних
сигналів дискретних блоків
![]() згідно
з формулою (2.1), викладені в підрозділі
2.1.
згідно
з формулою (2.1), викладені в підрозділі
2.1.
К
Рис.
4.1. Бібліотека Discrete
![]() ,
а вихідні сигнали між двома сусідніми
перериваннями утримуються на постійному
рівні.
,
а вихідні сигнали між двома сусідніми
перериваннями утримуються на постійному
рівні.
4.2.1 Unit Delay (Одиничне Дискретне Запізнювання)
Робить затримку сигналу й утримання його на цьому рівні на один період квантування.
![]() . (4.12)
. (4.12)
Початкова умова Initial condition задає значення виходу блоку на першому кроці моделювання системи, на якому вихід блоку Unit Delay не визначений.
Крім періоду квантування, може бути заданий зсув offset. Блок підтримує тільки скалярні вхід і вихід.
4.2.2 Discrete-Time Integrator (Дискретний Інтегратор)
Виконує
чисельне інтегрування вхідного сигналу
з періодом дискретності
![]() (Sample
Time)
і початковою умовою x0
(Initial
condition).
Дискретний інтегратор може використовувати
один із трьох методів чисельного
інтегрування (Integrator
method):
(Sample
Time)
і початковою умовою x0
(Initial
condition).
Дискретний інтегратор може використовувати
один із трьох методів чисельного
інтегрування (Integrator
method):
Forward Euler – метод нижніх (лівобічних) прямокутників:
![]() , (4.13)
, (4.13)
![]() ; (4.14)
; (4.14)
Backward Euler – метод верхніх (правобічних) прямокутників:
![]() , (4.15)
, (4.15)
![]() ; (4.16)
; (4.16)
Trapeziodal – метод трапецій (середніх прямокутників):
![]() , (4.17)
, (4.17)
![]() . (4.18)
. (4.18)
Застосування різних методів чисельного інтегрування (ЧІ) можна продемонструвати за допомогою розгорнутої моделі дискретного інтегратора, зображеної на рис. 4.2, і перехідних функцій, приведених на рис. 4.3.
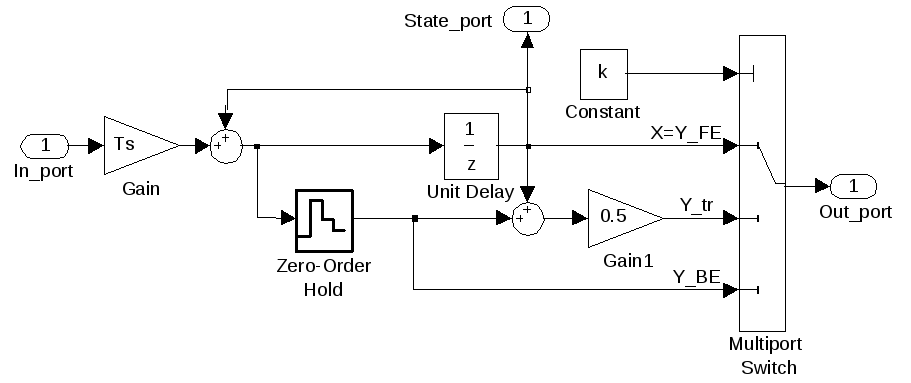
Рис. 4.2. Розгорнута модель дискретного інтегратора
з різними алгоритмами чисельного інтегрування
На останньому рисунку для порівняння приведена також перехідна функція неперервного інтегратора.
Як видно з рис. 4.2, основу цифрового інтегратора складає ланка запізнювання на період дискретності Unit Delay, замкнена додатним зворотним зв'язком. Один від одного інтегратори з різними алгоритмами ЧІ відрізняються точкою знімання вихідного сигналу. Варто звернути увагу на те, що інтегратори, які використовують методи Backward Euler і Trapezoidal, мають прямий зв'язок входу з виходом. Тому при замиканні їхнього виходу на вхід утворюється алгебраїчний контур. Уникнути цього можна заміною вихідного сигналу сигналом стану State port, попередньо зробивши його видимим установкою прапорця Show State port, або включити в замкнений контур блок Unit Delay.

а) б) в)
Рис. 4.3 – Перехідні функції дискретних інтеграторів
з різними методами чисельного інтегрування: а) Backward Euler, б) Forward Euler, в) Trapeziodal
Слід відзначити, що алгоритм, закладений в роботу блоку Discrete-Time Integrator, дещо складніший, ніж це показано на рис. 4.2, і не зовсім ретельно продуманий, що приводить до деяких похибок в його роботі. Зокрема, при встановленні на вході цього блоку ланки Const або ланки Step з нульовим значенням параметру Step time перехідні функції інтегратора не змінюються при зміні методу чисельного інтегрування і мають вигляд рис. 4.3, а. Так само веде себе дискретний інтегратор і при використанні його порту стану для розв‘язання алгебраїчного контуру. Отже, в таких випадках краще використовувати не бібліотечний блок , а створити його власноруч за схемою рис. 4.2.
Так само, як і аналоговий інтегратор (див. підрозділ 3.2), дискретний інтегратор може працювати в режимах обмеження (Limit Output) і скидання (External reset) вихідного сигналу в початковий стан, який може встановлюватися усередині блоку (internal) і поза нього (external). Зміни установок відображаються на піктограмі блоку.
Для обмеження вихідних сигналів дискретних інтеграторів у моделі рис. 4.2 треба блок Unit Delay замінити блоком запізнювання з обмеженням вихідного сигналу, який можна створити за допомогою моделі рис. 4.4, а на виходах блоків Zero-Order Hold та Gain1 установити ланки Saturation з тими ж самими рівнями обмеження, що задані в блоках Constant і Constant1 моделі рис. 4.4.
У
перемикачах Switch
і Switch1
моделі рис. 4.4 значення
![]() параметруThreshold
повинно задовольняти умові
параметруThreshold
повинно задовольняти умові
![]() .
Зазвичай приймають середнє значення
указаного діапазону, тобто
.
Зазвичай приймають середнє значення
указаного діапазону, тобто![]() .
.