

2.3 Індивідуальні завдання
1) Створити
модель, яка формує вхідні сигнали:
![]() та
та![]() ,
і зафіксувати ці сигнали блоками
бібліотекиSinks
у такі способи:
,
і зафіксувати ці сигнали блоками
бібліотекиSinks
у такі способи:
двома блоками Scope,
одним блоком Scope з двома системами координат,
одним блоком Scope з одною системами координат,
блоком Floating Scope,
одним (спільним) та двома (окремими для кожного сигналу) блоками Out;
одним та двома блоками To Workspace,
одним та двома блоками To File,
блоком XY Graph,
блоками Display;
використати
одержану інформацію для побудови
графіків
![]() ,
,![]() та
та![]() ;
;
2) створити модель, що складається з блоків бібліотеки Sources, приєднаних через ключовий елемент Multiport Switch до найбільш зручних блоків бібліотеки Sinks; ознайомитися з принципами роботи джерел вхідних сигналів, змінюючи їхні параметри;
3) сформувати вхідні сигнали, подані на рис. 2.11, за даними табл. 2.1.
4)
сформувати вхідні сигнали
![]() за формулами, поданими в останньому
стовпці табл. 2.1.
за формулами, поданими в останньому
стовпці табл. 2.1.
У звіті представити моделі та отримані графіки.
2.4 Методичні рекомендації
1) Без зайвої потреби не використовуйте вікна моделей, бібліотек, осцилографів у повноекранному режимі.
2) Для швидкого з‘єднання двох блоків виділіть щигликом миші вхідний блок, натисніть на клавішу <Ctrl> та виділіть мишею вихідний блок.
3) Для розмноження блоків та розгалуження ліній зв‘язку використовуйте операцію drag (тягти) при натиснутій правій клавіші миші.
4) Деякі операції з блоками зручно робити через меню, що випадає при щиглику по блоку правою клавішею миші.
5) Слідкуйте за наочністю моделі, для чого притримуйтесь таких правил:
намагайтеся використовувати мінімальну кількість зломів та перетинів ліній зв‘язку;
не робіть блоки занадто великими (модель повинна бути компактною);
приховуйте імена блоків, призначення яких зрозуміло з їхніх піктограм;
якщо це сприяє кращому порозумінню моделі, замінюйте імена стандартних блоків іншими іменами, іменуйте лінії зв‘язку та доповнюйте моделі текстовими коментарями;
при використанні різних кольорів ретельно обміркуйте, що саме ви бажаєте виділити тим чи іншим кольором.
6) Для реєстрації часу моделювання застосовуйте один з таких засобів:
блок Clock приєднайте до блоку To Workspace, визначивши у полі Variable name цього блоку будь-яку змінну, наприклад, t.;
у вкладці Workspace I/O вікна Simulation Parameters установіть прапорець Time функції Save to workspace.
7) При реєстрації даних блоками To Workspace і Scope, а також за допомогою функції Save to workspace вікна Simulation Parameters використовуйте формат Array. При великій кількості точок у векторі часу моделювання не забувайте збільшити або зробити безкінечним (Inf) параметр Limit data point to last.
8) Для об‘єднання декількох скалярних сигналів в один векторний використовуйте блок Mux бібліотеки Signals & Systems. Це дасть змогу скоротити кількість блоків реєстрації.
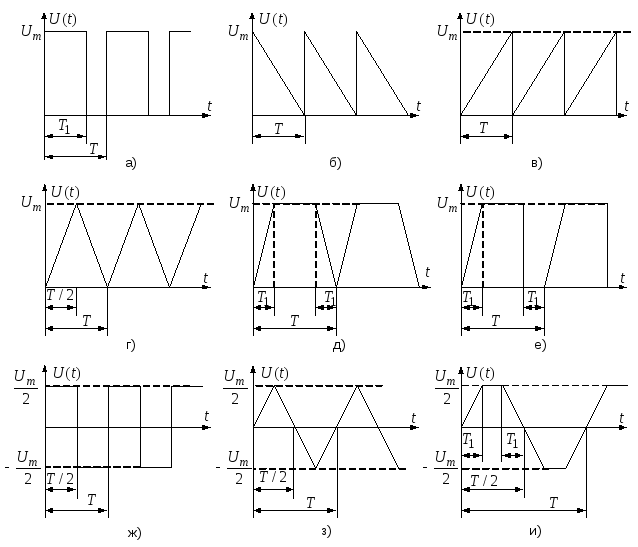
Рис. 2.11. Графіки вхідних сигналів
Таблиця 2.1
|
№ вар. |
|
Т |
Т1 |
№ графіка |
|
|
1 |
100 |
1 |
0,2 |
а, б, д |
|
|
2 |
100 |
1 |
0,4 |
а, в, е |
|
|
3 |
100 |
1 |
0,6 |
а, г, и |
|
|
4 |
150 |
2 |
1 |
а, д, з |
|
|
5 |
150 |
2 |
0,8 |
ж, б, д |
|
|
6 |
150 |
2 |
1,2 |
ж, б, е |
|
|
7 |
200 |
0,5 |
0,1 |
ж, в, и |
|
|
8 |
200 |
0,5 |
0,2 |
ж, г, д |
|
|
9 |
200 |
0,5 |
0,15 |
ж, г, е |
|
|
10 |
220 |
0,1 |
0,01 |
ж, г, и |
|
|
11 |
220 |
0,1 |
0,02 |
а, б, е |
|
|
12 |
220 |
0,1 |
0,05 |
а, б, и |
|
|
13 |
250 |
10 |
1 |
а, г, д |
|
|
14 |
250 |
10 |
2 |
а, г, е |
|
|
15 |
250 |
10 |
4 |
а, з, и |
|
|
16 |
75 |
5 |
1 |
а, з, е |
|
|
17 |
75 |
5 |
0,5 |
а, д, и |
|
|
18 |
75 |
5 |
1,5 |
ж, г, е |
|