

25. Случаи приведения пространственной системы сил к простейшему виду.
В зависимости от соотношения R0* и М0* возможны следующие случаи приведения:1) R0*=0 и М0*=0 – система сил находится в равновесии.2) R0*≠0 и М0*=0 – система сил приводится к равнодействующей, равной главному вектору, л.д. которой проходит через центр приведения (поступательное движение)
3) R0*=0 и М0*≠0 – система сил приводится к паре сил с моментом равным главному моменту с л.д. проходящей через центр приведения (вращательное движение)
4) R0*≠0 и М0*≠0 – система сил приводится к равнодействующей, равной главному вектору с л.д. проходящей через центр приведения (R0* перпендикулярно М0*) (плоско-параллельное движение)
5) R0*≠0 и М0*≠0 (R* параллельно М*) – система сил сводится к главному вектору и главному моменту с л.д. проходящими через центр приведения (винтовое движение)6) R0*≠0 и М0*≠0(R* перпенд М0*; R* парал М0*) – система сил сходится в динаме, ось которой не проходит через центр приведения (сложное движение)
Центр параллельных сил – точка, через которую проходит линия действия равнодействующей системы параллельных сил Fk при любом повороте всех этих сил около их точек приложения в одну и ту же сторону и на один и тот же угол.
17. Приведение системы сил к динаме. Уравнение центральной оси. Четыре случая приведения сил
INCLUDEPICTURE
"http://www.pppa.ru/metodika/theory/mechanics10.files/image001.gif"
\* MERGEFORMATINET
 ;
INCLUDEPICTURE
"http://www.pppa.ru/metodika/theory/mechanics10.files/image002.gif"
\* MERGEFORMATINET
;
INCLUDEPICTURE
"http://www.pppa.ru/metodika/theory/mechanics10.files/image002.gif"
\* MERGEFORMATINET
![]() -
динама.
-
динама.
INCLUDEPICTURE
"http://www.pppa.ru/metodika/theory/mechanics10.files/image001.gif"
\* MERGEFORMATINET
 ;
INCLUDEPICTURE
"http://www.pppa.ru/metodika/theory/mechanics10.files/image003.gif"
\* MERGEFORMATINET
;
INCLUDEPICTURE
"http://www.pppa.ru/metodika/theory/mechanics10.files/image003.gif"
\* MERGEFORMATINET
![]() -
равнодействующая.
-
равнодействующая.
INCLUDEPICTURE
"http://www.pppa.ru/metodika/theory/mechanics10.files/image004.gif"
\* MERGEFORMATINET
 ;
INCLUDEPICTURE
"http://www.pppa.ru/metodika/theory/mechanics10.files/image005.gif"
\* MERGEFORMATINET
;
INCLUDEPICTURE
"http://www.pppa.ru/metodika/theory/mechanics10.files/image005.gif"
\* MERGEFORMATINET
![]() -
пара.
-
пара.
INCLUDEPICTURE
"http://www.pppa.ru/metodika/theory/mechanics10.files/image004.gif"
\* MERGEFORMATINET
 ;
INCLUDEPICTURE
"http://www.pppa.ru/metodika/theory/mechanics10.files/image006.gif"
\* MERGEFORMATINET
;
INCLUDEPICTURE
"http://www.pppa.ru/metodika/theory/mechanics10.files/image006.gif"
\* MERGEFORMATINET
![]() -
равновесие.
-
равновесие.
Уравнения центральной винтовой оси Mx - yRz + zRy = pRx, My - zRx + xRz = pRy, Mz - xRy + yRx = pRz,
R0*≠0 и М0*≠0(R* перпенд М0*; R* парал М0*) – система сил сходится в динаме, ось которой не проходит через центр приведения (сложное движение)
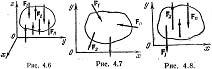
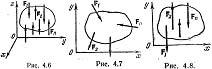
20. Уравнение равновесия пространственной системы сил. Частные случаи.
Условия равновесия пространственной системы сил:
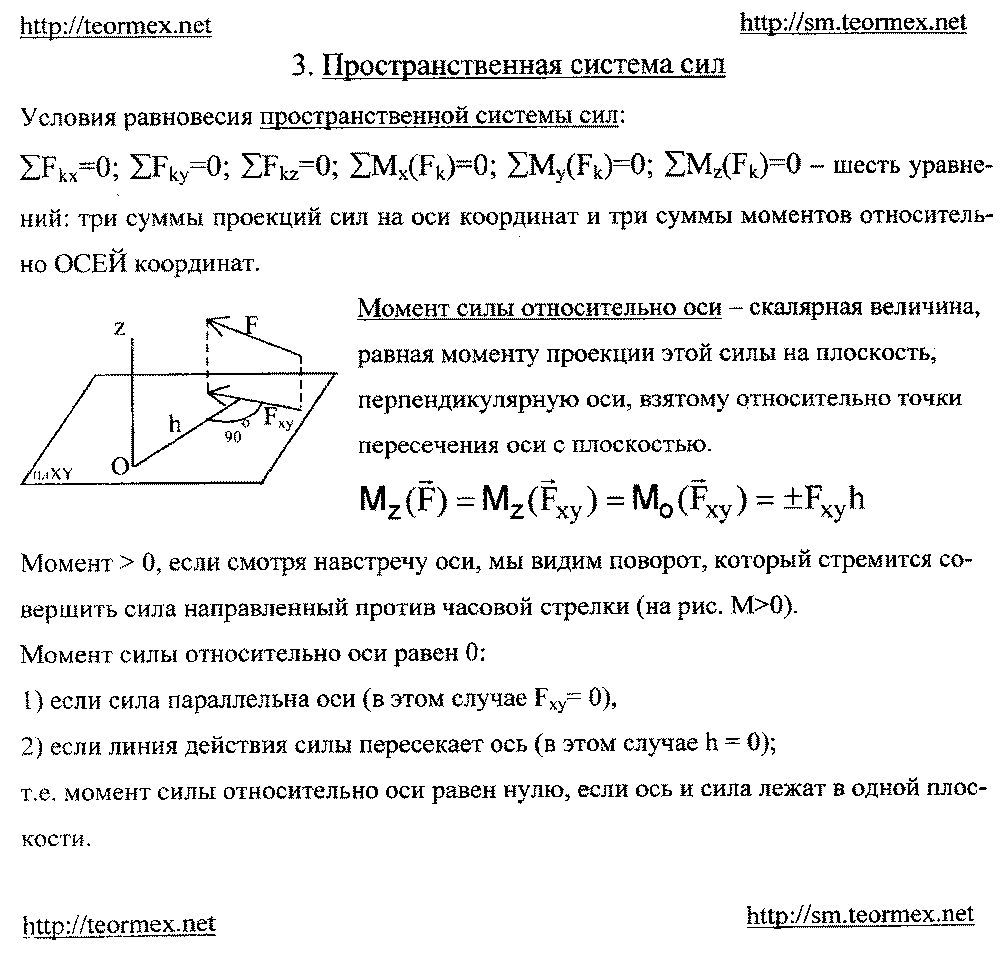
Шесть уравнений: три суммы проекций сил на оси координат и три суммы моментов относительно осей координат
Частные случаи:
 1)
Равновесие пространственной системы
параллельных сил.
1)
Равновесие пространственной системы
параллельных сил.
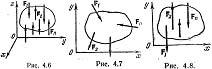 Пусть
ось Z параллельна линиям действ силы,
тогда проекции сил на x и y равны 0 (Fkx=0
и Fky=0),
а остаётся только Foz.
А что касается моментов, то остаются
только Mox и
Moy,
а Mozотсутствует.
Пусть
ось Z параллельна линиям действ силы,
тогда проекции сил на x и y равны 0 (Fkx=0
и Fky=0),
а остаётся только Foz.
А что касается моментов, то остаются
только Mox и
Moy,
а Mozотсутствует.
2) Равновесие плоской системы сил. Остаются ур-я Fox, Foy и момент Moz .
 3)
Равновесие плоской системы параллельных
сил. Остаются только 2 ур-я: Foy и
Moz.При
составлении ур-ий равновесия за центр
привидения может быть выбрана любая
точка.
3)
Равновесие плоской системы параллельных
сил. Остаются только 2 ур-я: Foy и
Moz.При
составлении ур-ий равновесия за центр
привидения может быть выбрана любая
точка.