

16. Основная теорема статики о приведении системы сил к заданному центру (теорема Пуансо). Главный вектор и главный момент системы сил.
Всякую пространственную систему сил в общем случае можно заменить эквивалентной системой, состоящей из одной силы, приложенной в какой-либо точке тела (центре приведения) и равной главному вектору данной системы сил, и одной пары сил, момент которой равен главному моменту всех сил относительно выбранного центра приведения.
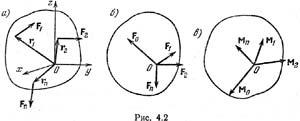
Главным вектором системы сил называется вектор R, равный векторной сумме этих сил:
R = F1 + F2 +
... + Fn = ![]() Fi.
Fi.
Для плоской системы сил ее главный вектор лежит в плоскости действия этих сил.
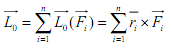
Главным моментом системы сил относительно центра O называется вектор LO, равный сумме векторных моментов этих сил относительно точки О:
LO = MO(F1)
+ MO(F2)
+ ... + MO(Fn)
= ![]() MO(Fi).
MO(Fi).
Вектор R не зависит от выбора центра О, а вектор LO при изменении положения центра О может в общем случае изменяться.
Теорема Пуансо: Произвольную пространственную систему сил можно заменить одной силой главным вектором системы сил и парой сил с главным моментом не нарушая состояния твердого тела. Главный вектор представляет собой геометрическую сумму всех сил действующих на твердое тело и расположен в плоскости действия сил. Главный вектор рассматривается через его проекции на оси координат.
Чтобы привести силы к заданному центру приложенному в некоторой точке твердого тела необходимо: 1) перенести параллельно силу самой себе к заданному центру не изменяя модуля силы; 2) в заданном центре приложить пару сил, векторный момент которой равен векторному моменту перенесенной силы относительного нового центра, эту пару называют присоединенной парой.
Зависимость главного момента от выбора центра приведения. Главный момент относительно нового центра приведения равен геометрической сумме главного момента относительно старого центра приведения и векторного произведения радиуса-вектора, соединяющего новый центр приведения со старым, на главный вектор.
18. Инварианты приведения пространственной системы сил.
Сначала приведем данную систему сил, приложенную к абсолютно твердому
т елу,
к центру 0. Тогда получаем эквивалентную
систему, которая характеризуется главным
вектором и главным моментом
елу,
к центру 0. Тогда получаем эквивалентную
систему, которая характеризуется главным
вектором и главным моментом
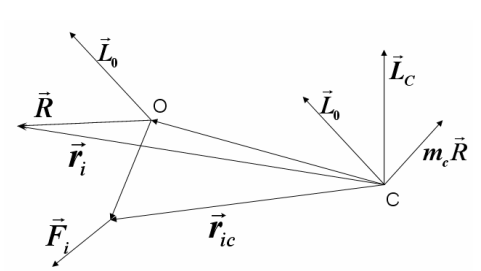
Затем приведем данную систему к новому центру C. Главный вектор системы при этом не изменится. Главный момент изменится, так как относительно нового центра приведения момент каждой из сил системы станет другим. Найдем его изменение.

Таким образом, при изменении центра приведения, главный момент изменяется на величину, равную моменту главного вектора относительно нового центра приведения.
Г лавный
вектор пространственной системы сил
не изменяется при перемене центра
приведения, т.е. он представляет собой
статический инвариант пространственной
системы сил по отношению к изменению
центра приведения.
лавный
вектор пространственной системы сил
не изменяется при перемене центра
приведения, т.е. он представляет собой
статический инвариант пространственной
системы сил по отношению к изменению
центра приведения.
Спроектируем
равенство на направление главного
вектора R и получим
Проекции главных моментов относительно центров приведения O и C на направление главного вектора равны между собой, то есть проекция главного вектора-момента относительно любой точки на направление главного вектора есть второй статический инвариант пространственной системы сил.
Е сли
левую и правую части равенства скалярно
умножим на главный вектор R , то
сли
левую и правую части равенства скалярно
умножим на главный вектор R , то
Таким образом, скалярное произведение главного-вектора момента системы относительно любой центра приведения на ее главный вектор дает другое выражение для второго статического инварианта.