

43. Выражение скорости и ускорения точки вращающегося тела в виде векторных произведений.
П
 роведем
из произвольной точки
роведем
из произвольной точки ![]() на
оси вращения р
на
оси вращения р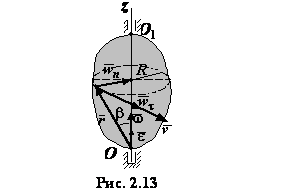 адиус-вектор
адиус-вектор ![]() в
рассматриваемую точку
в
рассматриваемую точку ![]() тела.
тела.
г

 де
символом
де
символом ![]() обозначено
векторное произведение вектора угловой
скорости
обозначено
векторное произведение вектора угловой
скорости  и
радиуса-вектора
и
радиуса-вектора ![]() .
Вектор
.
Вектор ![]() перпендикулярен
к плоскости, проходящей через точку
перпендикулярен
к плоскости, проходящей через точку ![]() и
ось вращения, и направлен в сторону
вращения тела. Поэтому он совпадает с
вектором скорости
и
ось вращения, и направлен в сторону
вращения тела. Поэтому он совпадает с
вектором скорости ![]() как
по величине, так и по направлению. Таким
образом,
как
по величине, так и по направлению. Таким
образом,


Легко
показать, что вектор  направлен
по касательной к траектории точки в
одну сторону со скоростью, если вращение
ускоренное, и в противоположную
сторону, если оно замедленное, а
вектор
направлен
по касательной к траектории точки в
одну сторону со скоростью, если вращение
ускоренное, и в противоположную
сторону, если оно замедленное, а
вектор ![]() направлен
по радиусу к оси вращения. Поэтому
первый из них есть вектор вращательного,
а второй - центростремительного
ускорения точки:
направлен
по радиусу к оси вращения. Поэтому
первый из них есть вектор вращательного,
а второй - центростремительного
ускорения точки:
4. План решения задач статики.
Решаемые методом статики задач могут быть одного из следующих типов:
1. Задачи, в которых известны действующие на тело силы и требуется найти, в каком положении или при каких соотношениях между действующими силами тело будет находиться в равновесии.
2. Задачи, в которых известны, что тело заведомо находится в равновесии и требуется найти чему равны при этом все или некоторые из действующих на тело сил. Реакции связей является величинами на перёд известными во всех задачах статики.
Приступая к решению любой задачи, следует прежде всего установить равновесие какого тела (тел) надо рассмотреть, чтобы найти искомую величину. Процесс решения сводится к следующим операциям:
1. Выбор тела (тел), равновесие которого должно быть рассмотрено.
2. Изображение действующих сил.
3. Составление условий равновесия.
4. Определение искомых величин.
5. Проверка правильности решения и исследование полученных результатов.
7. Теорема о трех силах
Если
приложенные к твердому телу три
непараллельные силы, лежащие в одной
плоскости, находятся в равновесии, то
линии действия этих сил пересекаются
в одной точке.
Положим, что тело находится в равновесии
под действием трех сил
![]() 1,
1,![]() 2
2![]() 3
приложенных в точках А, В, С. По третьей
аксиоме статики равнодействующая первых
двух сил может быть найдена по правилу
параллелограмма, построенного на силах
3
приложенных в точках А, В, С. По третьей
аксиоме статики равнодействующая первых
двух сил может быть найдена по правилу
параллелограмма, построенного на силах![]() 1
и
1
и![]() 2,
перенесенных вдоль линии их действия
в точку О пересечения последних, т. е.
2,
перенесенных вдоль линии их действия
в точку О пересечения последних, т. е.
![]() =
=
![]() 1+
1+![]() 2
2
Согласно
первой аксиоме статики для равновесия
тела необходимо и достаточно, чтобы
сила
![]() 3
была уравновешивающей двух первых сил.
Это возможно только в том случае, когда
силы
3
была уравновешивающей двух первых сил.
Это возможно только в том случае, когда
силы![]() и
и![]() 3
лежат на одной прямой и имеют противоположные
направления. Но тогда линии действия
сил
3
лежат на одной прямой и имеют противоположные
направления. Но тогда линии действия
сил![]() 1,
1,![]() 2
2![]() 3
пересекутся в одной точке О. Легко
доказать, что любая из трех данных сил
уравновешивает две другие.
3
пересекутся в одной точке О. Легко
доказать, что любая из трех данных сил
уравновешивает две другие.
Следует заметить, что выведенное условие равновесия трех непараллельных сил является необходимым, но не достаточным, т. е. мы можем утверждать, что если три непараллельные силы находятся в равновесии, то их линии действия пересекаются в одной точке, но мы не вправе сделать обратного заключения. Если линии действия трех сил пересекаются в одной точке, то отсюда вовсе не следует, что эти три силы представляют собой уравновешенную систему сил.