

31.Предмет кинематики. Пространство и время в классической механике. Относительность движения. Траектория движения точки. Основная задача кинематики.
Кинема́тика — раздел механики, изучающий математическое описание движения идеализированных, без рассмотрения причин движения.
Различают классическую кинематику, в которой пространственные и временные характеристики движения считаются абсолютными, то есть не зависящими от выбора системы отсчёта, и релятивистскую. В последней длины отрезков и промежутки времени между двумя событиями могут изменяться при переходе от одной системы отсчёта к другой.
Любое движение точки или тела рассматривается относительно какой-либо системы отсчёта. Обычно систему отсчёта связывают с землёй, считая её неподвижной. Если рассматривать движение тела относительно подвижной системы отсчёта, то при расчётах необходимо учитывать движение подвижной системы отсчёта относительно неподвижной.
Траекто́рия материа́льной то́чки — непрерывная линия, которую описывает точка при своём движении.
Главной задачей кинематики является математическое определение положения и характеристик движения точек или тел во времени. Также кинематика занимается изучением составных движений.
Способы задания движения точки (векторный, координатный, естественный).
З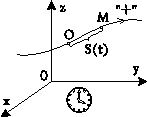 адать
движение точки означает
задать ее положение в каждый момент
времени.
адать
движение точки означает
задать ее положение в каждый момент
времени.
Естественный – используется. Если известна траектория движения, уравнение движения точки по этой траектории, начало отсчёта и положительное направлении движения.
К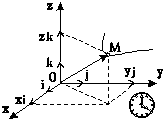 оординатный
– положение точки задаётся зависящими
от времени дифференцируемыми функциями
координат.X=x(t)
y=y(t)
z=z(t).
y=f(x)
– уравнение траектории.
оординатный
– положение точки задаётся зависящими
от времени дифференцируемыми функциями
координат.X=x(t)
y=y(t)
z=z(t).
y=f(x)
– уравнение траектории.
Векторный – положение описывается радиус-вектором проведённым из некоторой неподвижной точки. r=r(t) уравнение движения при векторном способе. Траектори в данном случае является гадографом радиус-вектора.
33. Скорость точки при векторном способе задания движения.
Положение
точки задается ее радиус-вектором ![]()
![]()
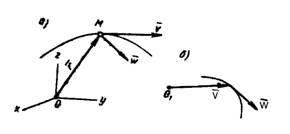
Скорость
точки определяется как вектор ![]() ,
направленный по касательной к годографу
радиус-вектора r в направлении движения
(рис. 1, а).
,
направленный по касательной к годографу
радиус-вектора r в направлении движения
(рис. 1, а).
Ускорение
определяется как вектор ![]() ,
направленный по касательной к годографу
скорости.
,
направленный по касательной к годографу
скорости.
34. Ускорение точки при векторном способе задания движения.
При векторном способе задания движения ускорение точки – это мера
изменения скорости точки, равная производной по времени от скорости этой
точки в рассматриваемой системе отсчета:
 .
.
где a - ускорение точки, м/с2.
Величина равная отношению приращения дэльта(V) вектора r к промежуточному времени дэльта(t) за который произошло это приращение называется средним ускорением точки за это время a cр.= дэльта(V)/дэльта(t). При дэльта(t) стремящимся к 0: a= dV/dt ускорение точки в данный момент времени. Ускорение всегда направлена по касательной к гадографу вектора скорости.
35. Скорость и ускорение при координатном способе задания движения.
В декартовых координатах положение точки задается ее координатами:
![]()

Скорость точки определяется ее проекциями на оси координат:
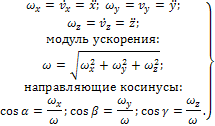
Ускорение определяется его проекциями на оси координат: