

20. Уравнения равновесия плоской системы сил.( Три формы).
Для того, чтобы плоская система сил находилась в равновесии, необходимо выполнение 2 условий:
1.Моменты сил относительно осей расположенных в плоскости должны быть равны 0
2.Проекции сил на оси, произвольно выбранной системы координат должны быть равны 0
Система уравнений равновесия произвольной плоской системы сил:
Fkx=0; Fky=0; Mо(Fk)=0
Частные случаи:
1. Mа(Fk)=0; Mв(Fk)=0; Mс(Fk)=0.
Эту систему уравнений нельзя использовать если точки А, В, С лежат на одной прямой
2. Fky=0; Mа(Fk)=0; Mв(Fk)=0;
Эту систему уравнений нельзя использовать, если ось ОУ перпендикулярна отрезку АВ.
14. Теорема Вариньона о моменте равнодействующей плоской системы сил.
ТЕОРЕМА:
Момент равнодействующей силы относительно любой точки на плоскости равен алгебраической сумме моментов составляющих сил относительно той же точки.
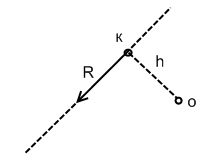
Определим момент равнодействующей силы R, приложенной в точке К, относительно произвольно выбранного центра приведения О.
Мо(R)=Rh, но R=R* и h=M*/R*
Тогда
Мо(R)=R*/M*R*=M=M1o+M2o+…+Mno
Что и требовалось доказать…
19. Статически определимые и неопределимые системы. Расчет составных конструкций.
Основная форма условий равновесия. Для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы проекций всех сил на каждую из двух координатных осей и сумма их моментов относительно любого центра, лежащего в плоскости действия сил, были равны нулю.

Статически определенными называют системы, которые можно решить методами статики твердого тела, т. е. системы, в которых число неизвестных не превышает числа уравнений равновесия сил.
Статически неопределенными называют системы с числом неизвестных, превышающим число уравнений равновесия сил, т. е. системы, которые нельзя решать методами статики твердого тела и для решения которых нужно учитывать деформации тела, обусловленные внешними нагрузками.
Если к телу приложена плоская система параллельных сил, то можно использовать только 2 уравнения равновесия сил, чтобы система была статически определена.
Расчет составных конструкций.
Чтобы рассчитать составную конструкцию выполняют следующие действия:
1.К конструкции прикладывают все задаваемые силы.
2. Согласно принципу освобождаемости тел от связей отбрасывают мысленно внешние связи, заменяя их соответствующими реакциями.
3. Установив, что число неизвестных реакций связей превышает число уравнений равновесия, которые можно составить для полученной системы . сил, конструкцию расчленяют, заменяя внутренние связи соответствующими реакциями.
4. Каждое из тел, входящих в состав конструкции, рассматривают как свободное, находящееся под действием задаваемых сил и реакций внешних и внутренних связей.
5. Сопоставляя общее число неизвестных величин и число всех уравнений равновесия сил, которые могут быть составлены после расчленения конструкции, устанавливают, является ли задача статически определенной.
6. Составляют уравнения равновесия сил> приложенных к каждому телу.
7. Если задача статически определенна, то полученную систему уравнений решают в наиболее удобной последовательности и определяют все неизвестные величины.