

36. Скорость точки при естественном способе задания движения.
а)
траектория движения, т. е. линия в
пространстве, с точками которой
последовательно совмещается в своем
движении исследуемая точка: с траекторией
связана естественная система координат,
показанная на рис. 3, где Q - соприкасающаяся
плоскость, Т - касательная, N - главная
нормаль и B - бинормаль к траектории в
той ее точке, в которой находится
движущаяся точка М в данный момент.  -
орты осей Т и N;
-
орты осей Т и N;
б) начало 0 и направление (+, -) отсчета расстояний вдоль траектории;
в )
закон движения s=s(t), определяющий
расстояние s от начала отсчета расстояний
до положения точки в данный момент
(дуговую координату точки).
)
закон движения s=s(t), определяющий
расстояние s от начала отсчета расстояний
до положения точки в данный момент
(дуговую координату точки).
Скорость точки определяется своей проекцией на касательную:
имеющий знак «+» в том случае, когда движение происходит в направлении отсчета расстояний.
37. Естественный трехгранник. Разложение ускорения по естественным осям. Касательное и нормальное ускорение.
Репер или трёхгранник Френе или Френе — Серре известный также, как естественный, сопровождающий, сопутствующий — ортонормированный репер в трёхмерном пространстве, возникающий при изучении бирегулярных кривых.
Пусть γ(s) —
произвольная натурально
параметризованнаябирегулярная
кривая в евклидовом
пространстве.
Под репером Френе понимают
тройку векторов![]() сопоставленную
каждой точке бирегулярной кривой
сопоставленную
каждой точке бирегулярной кривой ![]() ,
где
,
где
 —единичный касательныйвектор,
—единичный касательныйвектор, —единичный
вектор главной нормали,
—единичный
вектор главной нормали, —единичный
вектор бинормали
—единичный
вектор бинормали
к кривой в данной точке.
Трёхгранник
Френе играет важную роль в кинематике
точки при
описании её движения в «сопутствующих
осях». Пусть материальная точка движется
по произвольной бирегулярной кривой.
Тогда, очевидно, скорость точки направлена
по касательному вектору ![]() .
Дифференцируя по времени находим
выражение для ускорения:
.
Дифференцируя по времени находим
выражение для ускорения: ![]() .
Компоненту при векторе
.
Компоненту при векторе ![]() называют тангенциальным
ускорением,
она характеризует изменение модуля
скорости точки. Компоненту при
векторе
называют тангенциальным
ускорением,
она характеризует изменение модуля
скорости точки. Компоненту при
векторе ![]() называют нормальным
ускорением.
Она показывает, как меняется траектория
движения точки.
называют нормальным
ускорением.
Она показывает, как меняется траектория
движения точки.
Т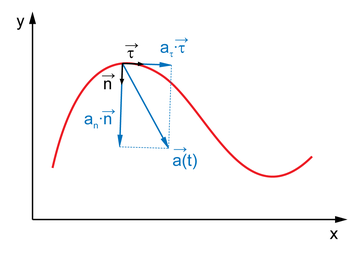 ангенциа́льное
ускоре́ние — компонента ускорения,
направленнаяпокасательной к траектории движения.
ангенциа́льное
ускоре́ние — компонента ускорения,
направленнаяпокасательной к траектории движения.

Центростремительное ускорение — часть полного ускорения точки, обусловленного кривизной траектории и скоростью движения по ней материальной точки.

или

37. Частные случаи движения точки. Смысл касательного и нормального ускорения.
Частные случаи движения точки:
1) Прямолинейное:
радиус кривизны r= ¥(бесконечно большой) Þ аn=0, a=at.
2) Равномерное криволинейное движ-ие:
v=const Þ at=0, a=an. Ускорение появляется только за счет изменения направления скорости. Закон движ-ия: s=s0+v×t, при s0=0 v=s/t.
3) Равномерное прямолинейное движ-ие:
а=at=an=0. Единственное движение, где а=0.
4) Равнопеременное криволинейное движение:
at=const, v=v0+at×t, . При равноускоренное движении знаки у at и v одинаковы, при равнозамедленном – разные.
Тангенциальное ускорение характеризует изменение модуля скорости точки.
Нормальное ускорение показывает, как меняется траектория движения точки.