

геодезия конспект лекций
.pdf1.3.2.5. Способ прямой угловой засечки Этот способ применяется для разбивки удаленных и труднодоступных объектов - мостовых
переходов и гидротехнических сооружений. При этом, положение проектной точки P с известными координатами определяют в натуре путем построения двух проектных углов β1 и β2 соответственно в двух твердых пунктах A и B (рис. 91).
|
|
|
P |
||
|
S3 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
S1 |
||
4 |
S2 |
2 |
1 |
|
|
|
|
|
|||
C |
3 |
|
|
|
|
|
|
|
|
|
|
b |
|
2 |
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
A |
|
B |
|
|
|
|
|
|
|
|
||
|
|
b1 |
|||
Рисунок 91 - Прямая угловая засечка
На точность разбивки влияют следующие источники: погрешность собственно прямой засечки и погрешность, обусловленная неточностью фиксации линий засечки (более подробно рассмотрено в вопросе мостовой триангуляции).
1.3.2.6. Способ замкнутого треугольника Способ используется для уточнения положения точки, разбиваемой прямой угловой засечкой,
главным образом при отсутствии дополнительных опорных пунктов.
Теодолит устанавливают в найденной точке и измеряют третий угол треугольника. Распределив невязку поровну или в соответствии с весами измеренных углов, определяют координаты точки Р (рис. 92). Сравнив их с проектными, находят поправки - редукции, на которые смещают первоначально найденную точку в проектное положение.

3
S3
P
 1
1 




 2
2 
S2 
 3
3
S1
2
b
 1
1
Рисунок 92 - Вставка точки в треугольник
Для оценки точности ее определения применяют формулу Ф. Красовского (без учета исходных данных).
mP = |
mβ |
|
S12 + S22 + b2 |
. |
ρ sinγ |
3 |
|||
При разбивке точки с трех пунктов (при вставке точки в треугольник) применяют формулу проф. К.Л. Проворова :
mP = |
mβ |
|
(S1S2 )2 + (S1S3 )2 + (S2S3 )2 |
|
|
, |
||||||||||
ρ |
|
|
(S |
sinγ |
1 |
)2 + (S |
2 |
sinγ |
2 |
)2 + (S |
3 |
sinγ |
3 |
)2 |
||
|
1 |
|
|
|
|
|
|
|
||||||||
где γ 1 ,γ 2 ,γ 3 - углы засечки соответственно между визирными лучами 2 и 3, 1 и 3, 1 и 2;
S1 ,S2 ,S3 - длины визирных лучей с пунктов 1, 2, 3.
1.3.2.7. Способ линейной засечки
Способ применяется, в основном, для разбивки точек сооружений по расстояниям S1 и S2, которые не превышают длины мерных приборов. Свето-, радио- и оптические дальномеры целесообразно применять по методу редуцирования. Разбивка состоит в нахождении точки пересечения дуг, построенных мерными приборами длиной S1 и S2, поэтому ее можно осуществлять двумя или поочередно одним мерным прибором (рис. 93).
1 |
S1 |
|
P |
||
|
S2
2
Рисунок 93 - Построение точки способом линейной засечки Точность разбивки определяют по формуле:
|
|
|
mP = |
|
mS12 + mS22 |
+ mФ2 |
, |
|
|
|
|
sin2 γ |
|||||
|
|
|
|
|
|
|
|
|
где |
mS1 |
,mS2 |
- погрешности откладывания длин S1 и S2; |
|||||
|
|
|||||||
mФ - погрешность фиксации точки.
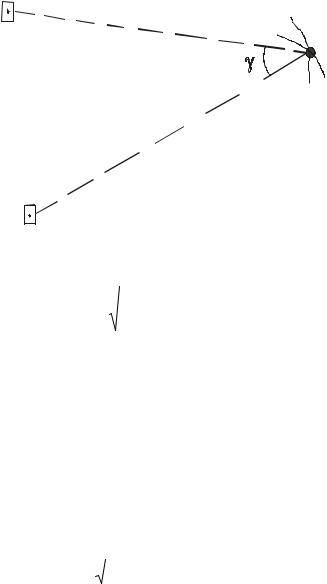
1.3.2.8. Способ створной засечки Способ заключается в определении положения точки на пересечении двух створов,
составляющих между собой угол засечки γ. Обычно, створы задают теодолитами, проволоками или струнами. Благодаря простоте применения и высокой точности, этот способ широко
применяется в промышленном строительстве при пересечении створов под прямым углом
(γ=90°).
По характеру проявления погрешностей, способ близок к способу прямой угловой засечки, но точнее его. Погрешность разбивки точки способом створной засечки определяют по формуле:
mP = |
|
mств2 |
1 + mств2 |
2 + |
2mФ2 |
|
sinγ |
|
|
||
|
|
|
|
|
|
где mств1 ,mств2 - погрешности построения створов. |
|
||||
1.3.2.9. Способ обратной угловой засечки
Способ применяется для уточнения положения приближенной точки сооружений при помощи измеренных на ней горизонтальных углов β1, β2, β3 на три опорные пункта (рис. 94) с последующим редуцированием (при разбивке центров мостовых опор, бычков плотин и других сооружений).




 1
1
 2
2
|
2 |
|
|
4 |
|
|
1 |
|
|
|
|
|
|
|
3 |
|
|
|
5 |
|
|
|
|
|
|
||
S1 |
ПК1 |
S2 ПК2 |
S3 |
ПК3 |
S4 |
ПК5 |
|
|
|
S5 |
|||
|
|
|
|
|
|
ПК4 |
Рисунок 95 – Способ проектного полигона Ходы могут быть висячими и разомкнутыми. Точность измерения углов и длин линий в
ходах определяется требованиями к точности разбивки сооружений. Расчет точности ведется по соответствующим формулам полигонометрии. Уравнивание проектного полигона сводится к
перемещению его пунктов параллельно невязке и пропорционально удалению искомого пункта от начального. Если местоположение сооружения неизвестно, то полигонометрический ход прокладывают вблизи оси сооружения. После уравнивания хода разбивают точки сооружений из пунктов полигонометрического хода, например, полярным способом. Иногда полигонометрический ход заменяют другими видами геодезической основы - триангуляцией, трилатерацией или линейно-угловой сетью.
1.3.2.11. Разбивка точек способом редуцирования При точных и высокоточных разбивочных работах, однократное построение разбивочных
элементов (углов и длин линий) не обеспечивает достаточной точности, поэтому, применяют метод редуцирования.
Метод редуцирования заключается в смещении приближенной точки в проектное положение. Основные этапы метода включают:
∙предварительную разбивку приближенной точки
∙точное измерение элементов разбивки для приближенной точки
∙сравнивание их с проектными величинами и вычисление редукций (отклонений)
∙смещение приближенной точки в проектное положение на основании вычисленных величин редукций.
Значение редукций удобно представлять прямоугольными или полярными координатами, и привязывать их к одному из направлений визирования с опорного пункта, которое принимается в качестве условной оси абсцисс. Направление смещения приближенной точки в проектное положение определяется знаком прямоугольных редукций rx и ry. По ним вычисляют угловой и линейный элементы общей редукции, привязанной к условной оси абсцисс по формулам:
αr |
= arctg |
ry |
; |
|
|
|
|
|
||
|
|
|
|
|
|
|
||||
|
|
|
rx |
|
|
|
|
|
||
|
|
|
|
|
|
r |
|
|
ry |
|
r = |
|
rx2 + ry2 = |
x |
= |
. |
|||||
|
cosαr |
sinαr |
||||||||
|
|
|
|
|
|
|
|
|||

Способ реализации редукций зависит от их величины: при r³200 мм применяется полярный способ с откладыванием угла теодолитом и расстояния- рулеткой. При r < 100-200 мм - способ прямоугольных координат с использованием координатной палетки.
Палетка изготавливается из прозрачного синтетического материала, например лавсана, размером 200x200 или 400x400 мм с сеткой 10x10 мм (рис. 96).
 X
X
-100 |
-80 |
-60 |
-40 |
-20 |
0 |
20 |
40 |
60 |
80 |
100 |
|
|||
100 |
|
|
|
|
|
|
|
|
|
|
|
|
100 |
|
80 |
|
|
|
|
|
|
|
|
|
|
|
|
80 |
|
60 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
60 |
|
|
40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
40 |
|
|
20 |
|
|
|
|
|
|
|
|
|
|
|
|
Y |
|
|
|
|
|
|
|
|
|
|
|
|
|
20 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
-20 |
|
|
|
|
|
|
|
|
|
|
|
|
-20 |
|
-40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-40 |
|
|
-60 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-60 |
|
|
-80 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-80 |
|
|
-100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-100 |
-80 |
|
-60 |
-40 |
-20 |
0 |
20 |
40 60 |
80 |
100 |
|
|||
|
|
|
||||||||||||
Рисунок 96 - Редукционная палетка
B
Y
|
S |
P r X |
X |
A |
S |
αR |
r Y |
|
r |
|
|
|
= - |
|
P |
|
|
|
|
|
|
Y |
|
Рисунок 97 - Редуцирование точки при способе полярных координат
Для редуцирования палетка укладывается началом координат в приближенной точке и ориентируется по направлению условной оси абсцисс. Затем, на палетке откладывают величины редукций rx и ry с учетом их знаков. Проектная точка фиксируется на сооружении - металлической пластине знака, бетона и т. п. Основной недостаток палетки, укладываемой на земле, - трудность ориентирования ее по условной оси абсцисс, что приводит к ее развороту и,
как следствие - к погрешностям редуцирования. Поэтому, удобнее пользоваться специальным геодезическим редукционным прибором (ГРП), разработанным в Киевском инженерно- строительном институте.
Прибор (ГРП) представляет собой двух координатный измерительный столик с втулкой подставки в середине для размещения визирной марки, отражателя дальномера, оптического центрира или теодолита. При помощи трех становых винтов столик прикрепляют к рамной головке специального штатива. Координатные оси столика по линии визирования ориентируют при помощи оптического визира с поворотным зеркалом. Подставка, закрепляющая приближенную точку, смещается двумя штурвалами. При этом, величина перемещения измеряется на шкалах координатного столика. Проектная точка сносится на рабочий горизонт (выше или ниже столика) при помощи оптического центрира или прибора вертикально визирования.
Для способа полярных координат (рис. 97) редукции имеют вид: rx = S0 - S;
ry |
= |
S0 |
× |
β ; |
|
|
ρ |
|
|
β = β 0 |
|
- β , |
||
где S0 ,S - расстояния и горизонтальные углы к проектной Р0 и приближенной Р точкам сооружения.
Редукции rx и ry привязаны к точке Р и направлению АР, взятым условно за начало координат и положительное направление оси абсцисс.
Аналогично получается и в способе створно-линейных координат, однако здесь величину ry удобно свести к нулю перемещением подставки теодолита ГРП в поперечном направлении.
В способе прямоугольных координат, который является комбинацией способов створа и полярных координат, редуцирование рационально производить раздельно: сначала для створной, а затем - для конечной точки, аналогично полярному.
При разбивке точек сооружений 3-х лучевой прямой угловой засечкой, переносят в натуру приближенную точку Р (рис. 98), измеряют для нее углы b1, b2, b3. Сопоставляя их с проектными значениями b10, b20, b30 , вычисляют вспомогательные величины:
|
|
|
|
S |
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
u1 |
= |
|
1 |
|
× β1 ; |
β1 = β1 |
- β1 ; |
|
|
||||||
|
ρ |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
u2 |
= |
S20 |
|
× β2 ; β2 = β20 - β2 ; |
|
|
|||||||||
|
|
|
|
|
||||||||||||
|
|
|
|
|
ρ |
|
|
|
|
|
|
|
|
|
|
|
|
u3 |
= |
S30 |
|
× β3 |
β3 = β30 - β3 , |
|
|
||||||||
|
|
|
|
|
||||||||||||
|
|
|
|
|
ρ |
|
|
|
|
|
|
|
|
|
|
|
а затем и сами редукции: |
|
|
|
|
|
×cosγ 0 |
|
|
|
|
|
×cosγ 0 |
|
|||
rx = |
u |
2 |
-u |
1 |
= |
u |
3 |
-u |
1 |
; |
||||||
|
|
|
|
12 |
|
|
|
13 |
||||||||
|
|
sinγ 120 |
|
|
sinγ 130 |
|
||||||||||
|
|
|
|
|
|
|
|
|||||||||
ry = u1 ;
γ120 = α20 -α10 ;
γ130 = α30 -α10 .
где S10 ,α10 ,S20 ,α20 ,S30 ,α30 - проектные расстояния и дирекционные углы направлений засечек.

|
|
|
|
|
|
|
|
X |
|
|
|
|
|
|
|
|
|
|
|
r y |
|
|
|
|
|
|
|
|
|
|
r x r |
|
|
P |
|
|
|
|
|
|
|
P |
|
|
|
ο |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
γ013 |
γ0 |
|
|
|
|
|
3 |
S3, 3 |
|
|
12 |
|
|
Y |
|||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
,2 |
|
|
|
||
3 |
|
|
β |
|
|
1 |
|
S |
2 |
|
|
|
|
|
|
S1, |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
1 |
|
|
2 |
β2 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||
Рисунок 98 - Редуцирование точки в способе угловой засечки |
|
|
|||||||||
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
L1 |
|
|
|
L3 |
|
|
|
|
|
A |
S1, |
1 |
|
|
|
|
|
C |
||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
S2 |
|
|
|
3 |
|
|
|
|
S1 |
|
|
β |
3 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S2 |
S3 |
P |
|
|
||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
r x |
|
|
||
|
|
|
|
P |
|
r y |
|
|
|
|
Y |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
2 |
|
|
|
|
|
|
Рисунок 99 - Редуцирование точки при обратной угловой засечке
Аналогичное положение имеем при створной засечке. Так как в промышленном и гражданском строительстве сворная засечка применяется с γ=90°, то:
Реализация таких редукций при помощи ГРП очень проста, эффективна и точна.
Для прямой линейной засечки с трех пунктов (см. рис. 98) определяют следующие величины:

t1 |
= S10 - S1 ; |
|
|
|
||
t2 |
= S20 |
- S2 ; |
|
|
|
|
t3 |
= S30 |
- S3 ; |
|
|
|
|
rx |
= t1 ; |
|
|
|
|
|
ry |
= |
t2 |
- t1 ×cosγ 120 |
= |
t3 - t1 ×cosγ 130 |
. |
|
sinγ 120 |
|
||||
|
|
|
|
sinγ 130 |
||
В обратной линейной засечке, когда исполнитель находится в разбиваемой точке, эти редукции меняют знак. Так, в случае однократной обратной угловой засечки (рис. 99) по разностям углов находят следующие величины:
|
|
|
|
S10 |
|
|
|
|
|
|
|
S10 |
0 |
|
|||||
u |
|
= |
|
|
|
β |
|
; |
f1 |
= |
|
|
|
|
- cos β1 |
; |
|||
1 |
|
ρ |
1 |
S20 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
u3 |
= |
|
S30 |
|
β2 ; |
f3 |
= |
|
S30 |
|
- cos β30 ; |
||||||||
|
ρ |
S20 |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
F = f1 sin β30 |
+ f3 sin β10 ; |
|
||||||||||||||
|
|
|
rx = |
u3 f1 + u1f3 |
; |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
ry = |
u |
3 |
sin β 0 -u |
1 |
sin β 0 |
|
||||||||||
|
|
|
|
|
1 |
|
|
|
3 |
, |
|
||||||||
|
|
|
|
|
|
F |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где f1 ,f3 ,F - вспомогательные величины, которые можно вычислить до начала полевых
работ.
Редукции привязаны к среднему направлению Р-В, принятому в качестве условной оси абсцисс. Если используется четвертый опорный пункт, решение сводится к двум задачам. По указанным величинам упрощается и оценка точности редукций:
mrx = ρm×βF 
 (S10 f3 )2 + (S30 ×f1 )2 ;
(S10 f3 )2 + (S30 ×f1 )2 ;
mry = ρm×βF 
 (S10 sin β30 )2 + (S30 sin β10 )2 ;
(S10 sin β30 )2 + (S30 sin β10 )2 ;
|
mβ |
|
|
, |
|
mr = |
|
(S10L3 ) + (S30 L1 )2 |
|||
ρ ×F ×S20 |
|||||
|
|
|
|
где mβ - погрешность измерения угла; L1 ,L3 - длины твердых сторон 1-2 и 2-3.
Вспособе обратной биполярной засечки, применяемой для введения приближенной точки С
вствор линии АВ при отсутствии видимости между ее концами, определяют угол нестворности
g=180°-b, где b - угол между направлениями на твердые пункты.
На рисунке 100 показано три случая решения задачи для смещения одной, двух и трех
приближенных промежуточных точек С в створ при наличии взаимной видимости между ними и конечными пунктами створа. Необходимые редукции вычисляют по формулам:

 B
B






 C
C

 A
A A
A A
A