

РАЗДЕЛ. II. ВЕКТОРНАЯ АЛГЕБРА
Тема 4. Векторы. Линейные операции над векторами
4.1. Вопросы для самостоятельного изучения
4.1.1. Определения
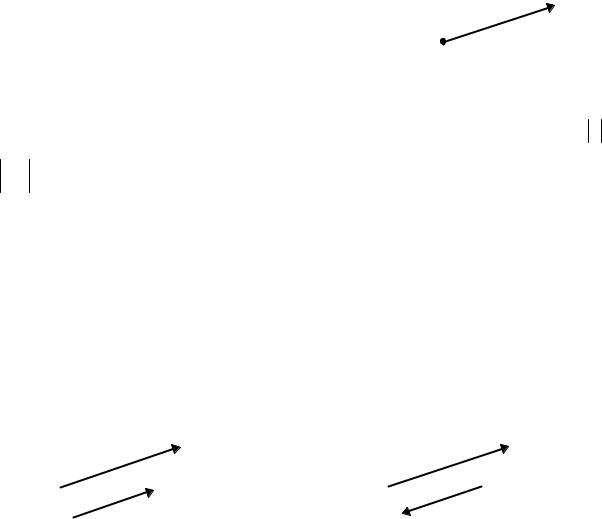
Вектором называется отрезок, которому приписано определенное направление (рис. 4.1.1), т.е. указаны начало и конец отрезка. Обозначается: a
или AB , где А – начало, B – конец отрезка.
Модулем (длиной) вектора называется длина
aG В
А
РИС. 4.1.1
отрезка и обозначается a
или AB .
Вектор, модуль которого равен единице, называется единичным векто-
ром или ортом.
Векторы a и b называются коллинеарными, если они лежат на одной
прямой или на параллельных прямых. Обозначается a 
 b . При этом коллинеар-
b . При этом коллинеар-
ные векторы могут быть одинаково направленными (рис. 4.1.2) a ↑↑b или
противоположно направленными (рис. 4.1.3) a ↑↓b .
aG |
|
|
|
|
|
aG |
bG |
|
|
|
|
|
bG |
РИС. 4.1.2 |
|
|
|
|
|
РИС. 4.1.3 |
Векторы a и b равны a =b , если: 1) |
|
a |
|
|
; 2) a ↑↑b . |
|
|
|
= |
b |
|||
|
|
|||||
|
|
|
|
|
|
|
14
4.1.2. Линейные операции над векторами
|
|
bG |
aG |
G |
G |
|
a |
+b |
РИС. 4.1.4
aG |
G |
G |
|
a |
+b |
bG
РИС. 4.1.5
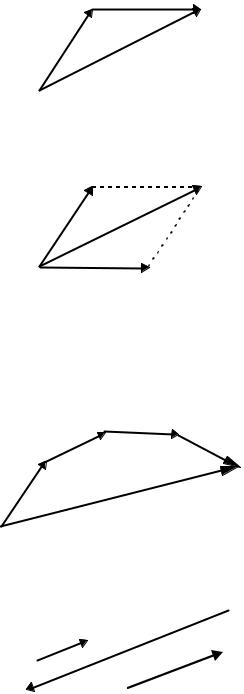
1. Суммой векторов a и b называется вектор a + b , построенный:
а) по правилу треугольника (рис. 4.1.4)
– вектор a + b проведен из начала вектора a в
конец вектора b , если конец вектора a и нача-
ло вектора b совмещены; или
б) по правилу параллелограмма (рис. 4.1.5) – вектор a + b является диагональю параллелограмма, построенного на векторах a и
b , как на сторонах.
Свойства: а) a + b =b + a ; б) (a + b )+ c = a + (b + c ).
bG |
|
cG |
dG |
|
|
2. Сумма a + b + c + d нескольких век- |
|||||||||||
|
торов строится по правилу многоугольника |
||||||||||||||||
aG |
G |
|
G |
(рис. 4.1.6) - это вектор, замыкающий ломаную |
|||||||||||||
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
G |
линию, составленную из слагаемых векторов, |
||||||||||||||||
a |
+b |
+c |
+d |
||||||||||||||
РИС. 4.1.6 |
его начало совпадает с началом первого векто- |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
ра a , а конец - с концом последнего вектора d . |
|||||||||||||
1 |
|
G |
|
|
|
3. Произведением вектора a на число |
|||||||||||
|
aG |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
2aG |
−2a |
λ называется вектор λa (рис. 4.1.7), удовле- |
|||||||||||||||
|
|
|
|
творяющий условиям: |
|||||||||||||
РИС. 4.1.7 |
1) |
|
λa |
|
= |
|
λ |
|
|
|
a |
|
; |
||||
|
|
|
|
|
|
||||||||||||
2) λa ↑↑ a , если λ > 0 и λa ↑↓ a , если λ < 0 . |
|||||||||||||||||
|
|
|
|
||||||||||||||
Свойства: а) |
a + b =b + a ; б) (λ + μ)a = λa + μa ; в)(λμ)a = λ(μa ). |
||||||||||||||||
15
4. Разностью векторов a и b называется вектор a −b = a + (−1)b , кото-
рый можно построить двумя способами:
а) a −b = a + (−b ) (рис. 4.1.8) б) b + (a −b ) = a (рис. 4.1.9)
G |
G |
G |
|
aG |
aG − b |
|
a |
− b |
a |
|
|
|
|
|
G |
|
G |
|
G |
|
−b |
|
b |
|
|||
|
b |
|||||
|
|
|
|
|
||
|
РИС. 4.1.8 |
|
|
РИС. 4.1.9 |
||
4.1.3. Координаты вектора, линейные операции над векторами в координатах
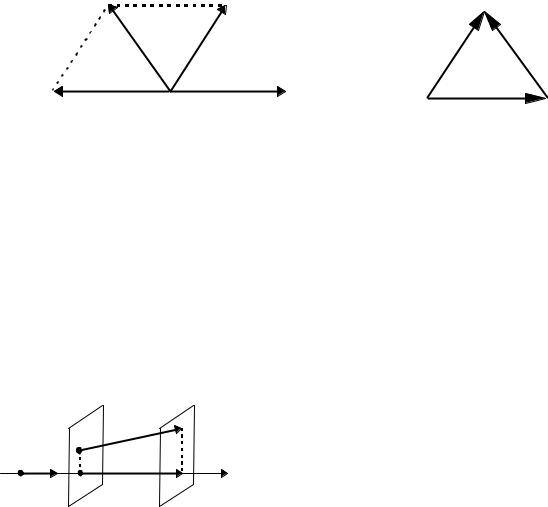
Ось Ou – это прямая с заданным направлением, масштабом и началом отсчета O . Единичный вектор e , лежащий на оси, направление которого совпадает с направлением оси, называется ортом направления оси.
Пусть дан вектор AB . Найдем проекции точек А, B на ось Ou (рис.
4.1.10) – точки |
′ |
= прOu |
А, B |
′ |
|
|
|
|
|
|
|
′ ′ |
. |
|
|
|
A |
|
= прOu B . Построим вектор A B |
|
|
||||||||||||
G |
А |
|
В |
|
|
Проекцией вектора AB на ось Ou назы- |
||||||||||
|
|
|
|
вается число |
|
|
|
|
|
|
|
|
|
|
||
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
О |
А′ |
|
В′ |
u |
|
|
|
′ |
′ |
|
, если |
′ ′ |
↑↑ e, |
|||
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
A B |
|
|
A B |
||||||
|
|
|
|
|
|
ПрOu АB = |
|
′ |
|
|
′ |
|
′ |
′ |
↑↓ e. |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
− |
|
|
|
|||||||
|
РИС. 4.1.10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
16
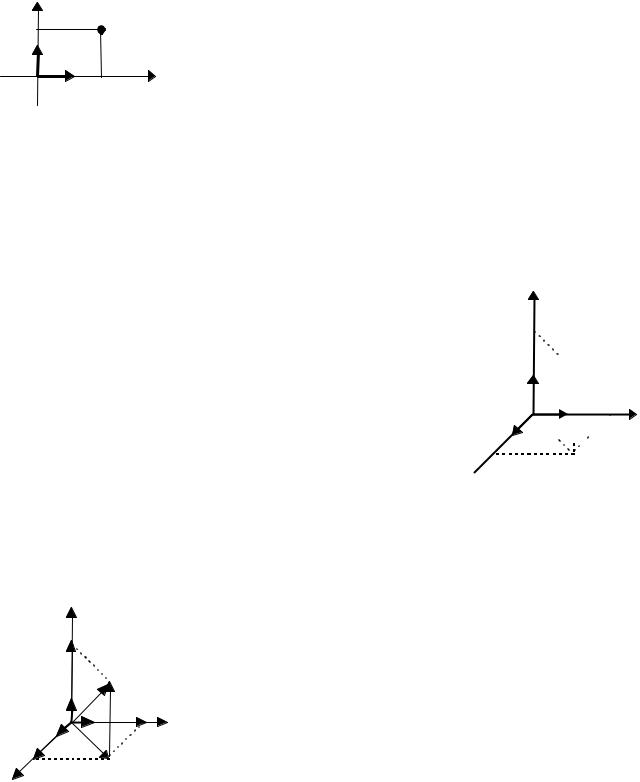
y |
x |
M |
|
Декартова прямоугольная система координат на |
||
G |
плоскости (обозначается 2 ) образована двумя взаимно |
|||||
j |
|
y |
перпендикулярными осями: Ox – ось абсцисс, Oy – ось |
|||
G |
|
|||||
O |
x |
|||||
i |
ординат, имеющих общее начало, O – начало коорди- |
|||||
|
|
|
||||
|
РИС. 4.1.11 |
нат (рис. 4.1.11). |
|
|||
|
Любая точка М в |
2 имеет две координаты M (x, y) . Оси координат име- |
||||
ют единичные векторы: i |
– орт оси Ox , j – орт оси Oy . Пара векторов (i , j ) |
|||||
называется базисом в |
2 . |
|
|
|||
|
Декартова прямоугольная система координат в |
z |
||||
пространстве ( 3 ) образована тремя взаимно перпен-
дикулярными осями: Ox – ось абсцисс, Oy – ось орди-
нат, Oz – ось аппликат, точка O – начало координат
(рис. 4.1.12). Любая точка М в 3 имеет три координа-
ты M (x, y, z) . Единичные векторы: i – орт оси Ox , j –
орт оси Oy , k – орт оси Oz . Тройка векторов (i , j,k )
образует базис в 3 .
z
ОkGiK




 Gj
Gj

 М
М


 y y
y y
 xx
xx
РИС. 4.1.12
z |
|
|
Рассмотрим вектор OМ в 3 , где O(0,0,0) , |
С |
z |
|
M (x, y, z) . Представим вектор OМ в виде суммы век- |
А |
|
|
|
|
М |
торов, лежащих на осях координат (рис. 4.1.13) |
|
|
kG Gj |
||
|
y |
||
О |
→ |
||
Аx |
K |
В y |
OМ = x i + y j + z k . |
i |
М1 |
Это представление вектора OМ называется раз- |
|
x |
|
РИС. 4.1.13
ложением вектора OМ по базису, а числа x, y, z назы-
ваются координатами вектора OМ . Пишут также
OМ = (x, y, z) .
17