

Navch_pisib_stat+kinem
.pdfX A = Q + F sin600 = 20 +10 × 0,866 = 28,66 кH;
YA = -F cos 600 = -10 × 0,5 = -5 кH;
M A = M + 2Q - F(sin 600 × 3 + cos 600 × 6) = 8 + 2 |
× 20 -10(0866 × 3 + 0,5 × 6) = |
= -7,98(кH × м). |
|
4.5 Рівновага системи тіл
Для будь-якої плоскої системи сил існує тільки три незалежних рівняння рівноваги, із яких можна визначити не більше трьох невідомих величин.
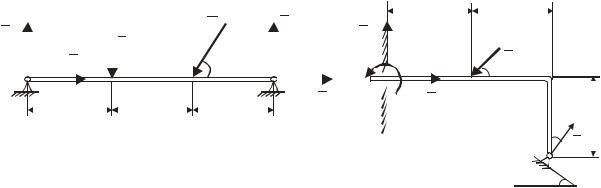
Задачі, в яких кількість невідомих величин не перевищує кількості рівнянь рівноваги для даної системи сил, є статично визначеними. При розрахунку інженерних конструкцій зустрічаються і статично невизначені задачі, в яких кількість невідомих перевищує кількість рівнянь рівноваги діючої на конструкцію системи сил. Такі конструкції називають статично невизначуваними. Наприклад, статично невизначуваними будуть закріплена нерухомими шарнірами балка АВ (рис. 49,а) і Г-подібна рама, закріплена жорстким кріпленням в точці А та рухомим шарніром в точці В (рис. 49,б). Для розв’язання задач з визначення реакцій в’язей цих конструкцій необхідно або враховувати їх деформацію, що не узгоджується з принципом затвердіння, або зробити задачі статично визначеними, замінивши для балки один з нерухомих шарнірів опорою на котках, та звільнивши Г- подібну раму від опори в точці В.
Статично невизначеними на перший погляд представляються задачі рівноваги складеної конструкції (системи тіл), в яких декілька тіл з’єднані між собою внутрішніми в’язями; зовнішніми будуть в’язі, які утримують від переміщення всю складену конструкцію.
Сили, що діють на складену конструкцію (систему тіл), також розділяють на зовнішні та внутрішні. Зовнішні – це сили (активні та реакції в’язей), з якими тіла, які не належать до конструкції, діють на дану систему тіл. До внутрішніх сил (внутрішніх реакцій) відносяться сили взаємодії між тілами даної конструкції.
70
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
l |
|
|
|
|
|
YA |
|
XA |
|
|
P |
|
Q |
|
|
|
YB |
YA |
|
|
|
|
F |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
A |
|
|
|
|
|
α |
|
|
|
B |
|
|
A |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l/3 |
|
|
l/3 |
|
l/3 |
|
|
|
XB |
|
|
MA XA |
|
|
|
|
|
l |
|||
|
|
|
|
|
|
|
|
|
|
|
|
α |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 49 |
|
|
|
|
|
|
|
|
|
|
||||
Для усунення статичної невизначеності при розв’язанні задач рівноваги системи тіл треба збільшити кількість незалежних рівнянь рівноваги до кількості невідомих. Це досягається такими двома способами.
За одним із них розглядається окремо рівновага кожного з тіл системи під дією прикладених до нього активних сил і реакцій в’язей з боку зовнішніх опор та з боку відокремлених тіл. При цьому реакції внутрішніх в’язей, як сили взаємодії між тілами, прикладають до кожного з тіл системи в точках з’єднання тіл, направляють їх в протилежних напрямках, враховуючи їх чисельну рівність між собою.
Інший спосіб передбачає складання рівнянь рівноваги всієї складеної конструкції замість рівнянь рівноваги одного з тіл системи. При цьому складену конструкції вважають абсолютно твердим тілом, на яке діють зовнішні активні сили і реакції зовнішніх в’язей. Внутрішні реакції в рівняннях рівноваги всієї системи тіл не враховуються, так як вони становлять зрівноважену систему сил.
Застосовуючи ці способи, треба в першу чергу складати рівняння рівноваги тих тіл, для яких задача розрахунку невідомих є статично визначеною. Це полегшить розв’язання системи 3n алгебраїчних рівнянь рівноваги (тут n - кількість тіл системи).
Розглянемо приклади розв’язання задач рівноваги системи тіл з застосуванням вказаних способів.
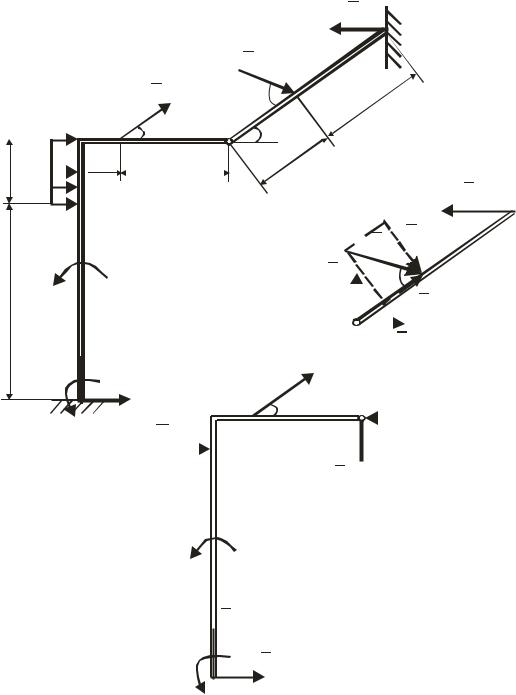
Приклад 9
Знайти реакції опор і тиск в проміжному шарнірі С заданої на рис. 50 конструкції, яка складається з невагомих кутника АС і стрижня СВ. На конструкцію діють пара сил з моментом M = 50 кH × м , розподілене нава-
71

нтаження з інтенсивністю q = 10 кH / м , сили F = 20 кH та P = 30 кH . Відомі розміри a = 4 м, b = 2м, c = 1м, d = 3м .
Розв’язання При розгляданні рівноваги всієї конструкції, як абсолютно твердого
тіла, три рівняння рівноваги довільної плоскої системи сил, що діють на систему тіл, будуть містити чотири невідомі реакції: X A , YA , RB , M A
(див. рис. 50, а).
Для усунення статичної невизначеності розділимо систему в точці з’єднання С і розглянемо рівновагу кожної частини конструкції окремо.
Спочатку розглянемо в стані рівноваги стрижень ВС, так як на нього крім відомої активної сили P , діє три невідомі реакції XC , YC шарніра С та RB гладенької поверхні в точці В (див. рис. 50, б), тобто задача рівноваги стрижня є статично визначеною.
Складемо три рівняння рівноваги діючої на стрижень довільної плоскої системи сил, скористувавшись основною формою умов рівноваги:
å Fkx = 0; XС + Pcos300 - RB = 0;
åFky = 0; YС + Psin300 = 0;
åM c (Fk ) = 0; RB (b + d)sin300 - Psin 600 × b = 0.
Складаючи останнє рівняння, при знаходженні MС (P) скористуємо-
ся теоремою Варіньона про момент рівнодіючої, розклавши силу P на складові, одна з яких P′′ = Pcos60° паралельна стрижню, тобто лінія її дії проходить через точку С і її момент MС (P′′) = 0, а інша P′ = Psin 60° перпендикулярна до стрижня і має плече відносно точки, що дорівнює відстані b; її момент MС (P¢) = MС (P) = Psin 60° × b .
Розглянемо тепер рівновагу кутника (рис. 50, в), до якого крім активних сил прикладемо реакції X A , YA, M A жорсткого защемлення в точці А, та реакції XC′ , YC′ шарніра С, направивши останні протилежно реакціям XC , YC балки ВС. Дію розподіленого навантаження замінимо зосередже-
ною силою Q (Q = q × b = 10 × 2 = 20кН ), приклавши її посередині ділянки
72
дії навантаження. Для плоскої системи, що діє на кутник, складемо також три рівняння рівноваги:
RB
B
P
b
a
 c q
c q

M
 YA
YA
MA
A
a)
|
F |
|
|
60° |
|
|
d |
|
|
|||
30° |
C |
30° |
|
|
|
|
|
|
|
|||
|
|
d |
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
P/ |
||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
YC |
|
|
60° |
|
|||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
P// |
|
|
|
|
|
|
C |
|
|
|
|
|
XC |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
F |
|
|
|
|
|
||
XA |
|
|
|
|
|
|
|
|
|
|||
|
|
30° |
|
|
|
|
|
|
|
|||
|
|
|
|
|
C |
|
|
|
||||
|
|
Q |
|
|
|
|
|
|
|
|
X/C |
|
Y/C
M
 YA
YA
MA XA
A
в)
Рисунок 50
åFkx = 0; X A + Q + F cos300 − XC′ = 0 ;
åFky = 0; YA + F sin300 − YC′ = 0 ;
RB
30°
 B
B
б)
73
å M A (Fk ) = 0;
M A + M -Q(a + b2) - F cos300 (a + b) + F sin300 ×c + XC (a + b) -YC¢ (c + d) = 0.
Враховуючи, що XC = XC′ та YC = YC′ , як сили взаємодії, встановимо, що системи шести складених рівнянь містять шість невідомих реакцій, тобто задача статично визначена.
Розв’язуючи систему цих рівнянь, знайдемо з третього рівняння:
RB |
= |
Psin 600 |
× b |
= |
30 × 0,866 × 2 |
= 20,8 (кН). |
||
(b + d) sin 300 |
(2 |
+ 3) × 0,5 |
||||||
|
|
|
|
|||||
Тепер з першого та другого рівняння маємо:
Xc = RB - Pcos300 = 20,8 - 30 × 0,866 = -5,2 кH ;
Yc = P sin 300 = 30 × 0,5 = 15 (кH ) .
Розв’язуємо рівняння системи рівноваги кутника, підставляючи туди замість XС′ , YС′ значення XС та YС з одержаними знаками:
X A = Xc - Q - F cos300 = -5,2 - 20 - 20 × 0,866 = -42,5 кH;
YA = Yc - F sin300 = 15 - 20 × 0,5 = 5 кH;
M A = -M + Q(a + b2) + F cos 300 (a + b) - F sin 300 × c - X c (a + b) + + Yc (c + d) = -50 + 20(4 + 1) + 20 × 0,866(4 + 2) - 20 × 0,5 × 1 -
- (-5,2)(4 + 2) + 15(1 + 3) = 235,1 (кH × м).
Відповідно до знаків реакцій встановлюємо, що реакції X A та XC направлені протилежно зображеним на розрахункових схемах напрямкам.
74
Зметою перевірки правильності рішення складемо і розв’яжемо одне
зрівнянь рівноваги системи сил, діючих на всю конструкцію:
n |
|
|
( |
|
)= 0; M + M |
|
|
|
(a + b)+ Q × |
b |
|
(c + d )- |
|
å |
M |
|
|
|
+ X |
|
- Y |
||||||
C |
F |
A |
A |
||||||||||
|
|||||||||||||
|
|
k |
|
2 |
A |
|
|||||||
k =1 |
|
|
|
|
|
|
|
|
|
||||
- F sin 30° × d + Psin 60° × b - Pcos60° × b + RB (b + d )sin 30° = 0;
50 + 235,1 + (- 42,5)(4 + 2)- 5(1 + 3)+ 20 × 0,5 × 2 - 20 × 0,5 × 3 - 30 × 0,866 × 2 + + 20,8(2 + 3)× 0,5 = 50 + 235,1- 255 - 20 + 20 - 30 - 51,96 + 52 = = 347,1 - 346,96 = 0,14 » 0.
Отже, розрахунки виконані правильно.
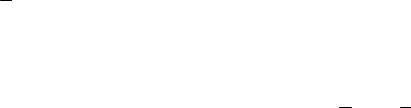
Приклад 10
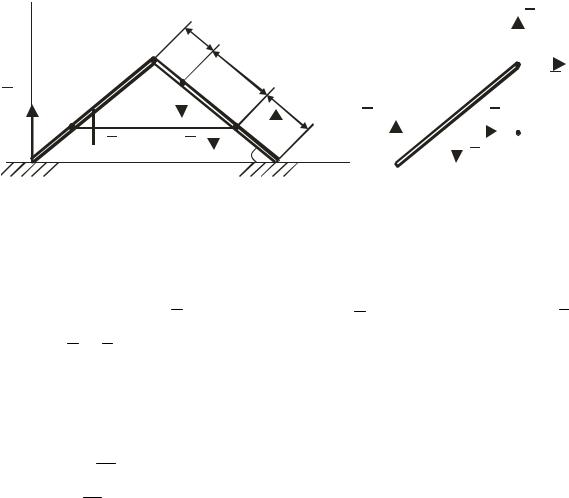
На гладенькій горизонтальній поверхні стоїть пересувна драбина, яка складається з двох частин АВ та ВС, довжиною 3м та вагою Р = 120 Н кожна, з’єднаних шарніром С і вірьовкою ЕF так, що відстань BF = АЕ = 1м. Центр ваги кожної з частин АС, ВС знаходиться в її середині. У точці D на відстані CD = 0,6м стоїть людина вагою 720 Н. Визначити реакції підлоги і шарніра та натяг Т вірьовки EF, якщо кут ВАС = АВС = 45°.
Розв’язання Розглядаючи драбину як одне тверде тіло (рис. 51,а), встановимо, що
ця конструкція знаходиться в стані рівноваги під дією активних сил P ваги кожної з частин драбини і Q ваги людини, та реакцій RA , RB гладенької поверхні підлоги.
Ці сили складають плоску систему паралельних сил, для якої умови рівноваги містять два рівняння. Так, як до цієї системи сил входять дві невідомі реакції RA , RB , то задача рівноваги драбини є статично визначеною. Складемо рівняння рівноваги цих сил:
åM A (Fk ) = 0;
RB (3 + 3)cos450 - P ×1,5cos450 - Q × 3,6cos450 - P × 4,5cos450 = 0;
åM B (Fk ) = 0;
75
- RA (3 + 3)cos450 + P × 4,5cos450 + Q × 2,4 × cos450 + P × 1,5cos450 = 0.
Із цих рівнянь знаходимо:
RB =
RA =
y
RA
E
A  45°
45° P
P
|
P(1,5 + 4,5) + Q × 3,6 |
= |
120 × 6 |
+ 720 |
× 3,6 |
= 552 H ; |
|
6 |
|
6 |
|
||
|
|
|
|
|
||
|
P(4,5 + 1,5) + Q × 2,4 |
= |
120 × 6 |
+ 720 |
× 2,4 |
= 408 H . |
|
6 |
|
6 |
|
||
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
C |
||
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
1 |
|
|
|
|
|
|
|
|
C |
|
|
|
|
||||
D |
, |
|
|
|
|
|
|
|
|
|
|
|
||||||
4 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
м |
|
|
|
|
|
|
|
|
|
|
|
|
XC |
|||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q |
|
F |
RB |
м |
RA |
E |
|
|
T |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
L |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
P |
45° |
B |
|
|
|
|
|
||||||||||
|
|
A |
|
|
|
P |
|
|
||||||||||
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|||
|
|
|
|
Рисунок 51 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тепер розглянемо рівновагу частини АС драбини (рис. 51,б), на яку окрім активної сили P ваги діють реакції RA гладенької поверхні, T вірьовки, XC , YC шарніра. Для довільної плоскої системи сил складемо рівняння рівноваги:
åFky = 0; YC − P + RA = 0;
åMC (Fk ) = 0; P × 1,5cos450 + T × 2 × sin 450 - RA × 3cos450 = 0;
åM L (Fk ) = 0; P × 1,5cos450 - RA × 3 × cos450 - XC × 2 × sin 450 = 0.
Тут застосована друга форма рівнянь рівноваги довільної плоскої си-
стеми сил, що забезпечує спрощення їх розв’язання, так як до кожного з рівнянь входить лише одна невідома величина.
Визначимо невідомі реакції, враховуючи, що sin450 = cos450 = 0,707.
76

|
|
|
YC = P − RA = 120 − 408 |
= −288 H ; |
|
|
|||||
T = |
3 × RA cos450 - 1,5Pcos450 |
= |
3 × 408 - 1,5 × 120 |
= 522 H; |
|||||||
|
|
|
|
2 |
|||||||
|
|
|
2sin 450 |
|
|
|
|
|
|
|
|
XC |
= |
3 × RA cos450 - 1,5Pcos450 |
= |
3 |
× 408 - 1,5 × 120 |
= 522 H . |
|||||
2sin 450 |
|
|
|
2 |
|
||||||
|
|
|
|
|
|
|
|
|
|
||
Виконаємо перевірку, переконавшись, що виконується рівняння рівноваги для сил, прикладених до всієї конструкції:
åM D (Fk )= 0; RB × 2,4 × cos45° - P × (1,5 - 0,6)cos 45° +
+P × (1,5 + 0,6)cos45° - RA (3 + 0,6)cos45° = 0.
Звідси, з врахуванням того, що cos45° ¹ 0 , обчислюємо:
RB × 2,4 - P × 0,9 + P × 2,1 - RA × 3,6 = 552 × 2,4 -120× 0,9 + + 120× 2,1 - 408× 3,6 =1576,8 -1576,8 = 0.
Отже, розрахунки виконані правильно.
Питання для самоконтролю
1Як обчислюються головний вектор та головний момент плоскої системи сил? Запишіть формули.
2За яких умов плоска система сил приводиться до рівнодіючої?
3За яких умов плоска система сил приводиться до пари сил?
4Скільки існує форм умов рівноваги довільної плоскої системи сил? Запишіть кожну з них.
5Запишіть рівняння рівноваги плоскої системи паралельних сил.
6Чому дорівнює рівнодіюча рівномірно розподіленого навантаження? Як вона направлена і де прикладається?
7Чому дорівнює рівнодіюча розподіленого навантаження з інтенсивністю, що змінюється за лінійним законом? Де вона прикладається?
77
5ТЕРТЯ
Урезультаті механічної взаємодії між шорсткими поверхнями тіл в місцях їх стикання виникає сила тертя, яка перешкоджає відносному ковзанню тіл. Розрізняють тертя спокою (статичне тертя) між взаємно нерухомими тілами і тертя руху (кінематичне тертя), яке відбувається при відносному русі тіл.
Тертя між тілами, поверхні яких не змащені, називають сухим тертям, а тертя при значному змащенні поверхонь – рідинним тертям. У теоретичній механіці розглядають тільки сухе тертя.
Розгляд всіх особливостей тертя є досить складною фізикомеханічною проблемою. Точне визначення сил тертя проводять за достатньо складними формулами, де враховуються не тільки механічні, а і електричні, термічні, внутрішньомолекулярні та інші характеристики. В інженерних розрахунках користуються установленими дослідним шляхом закономірностями, які з достатньою для практики точністю відображають основні особливості явища тертя.
5.1 Закони тертя ковзання
Наближені закони для сухого тертя ковзання були встановлені ще у XVIII ст. французьким фізиком Ш.Кулоном (1736-1806).
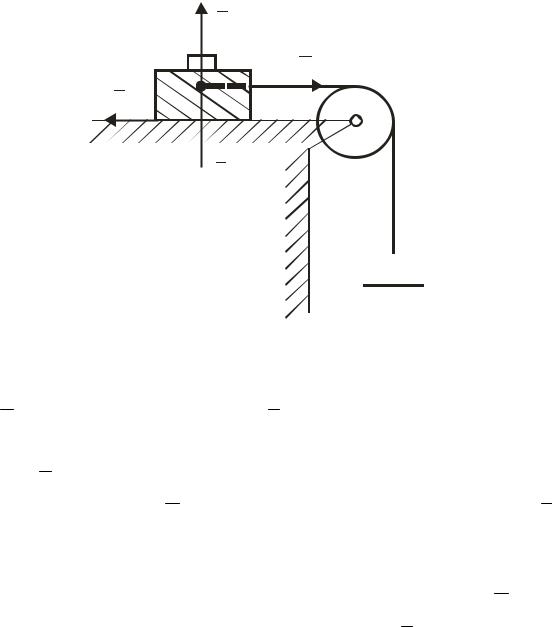
Основні особливості сил тертя можна установити за допомогою приладу, схема якого зображена на рис. 52.
78
N
A Q
Fmp
 P
P
Q 
Рисунок 52
При рівновазі тіла A, розміщеного на шорсткій поверхні, рушійна сила Q врівноважується силою тертя Fтр , поява якої обумовлена шорсткістю поверхні і наявністю зчеплення з поверхнею тіла, притиснутого силою ваги P до поверхні. Поступово нарощуючи вагу вантажу Q і таким чином збільшуючи силу Q при одному і тому ж нормальному тиску P , можливо досягти того навантаження Qmax , при якому тіло A зрушиться з місця. Очевидно, буде досягнуто граничне положення, при якому сила тертя стане найбільшою ( Fтр = Fmax ) і не зможе зрівноважувати силу Q при її
подальшому збільшенні. Змінюючи нормальний тиск P шляхом навантаження тіла A допоміжними гирьками можна дослідити, як змінюється при цьому гранична сила тертя Fmax .
Ці та інші досліди дозволяють підтвердити такі закони Кулона для сухого тертя ковзання:
1) При намірі зрушити одне тіло по поверхні іншого в площині стикання тіл виникає сила тертя, спрямована протилежно напрямку зрушення тіла, яка набуває будь-якого значення від нуля до максимальної сили тертя, при досягненні якої починається рух тіла, тобто:
0 ≤ Fтр ≤ Fmax . |
(56) |
79