2 Якими рівняннями задають плоский рух тіла?
3 Як зв’язані між собою швидкість довільної точки плоскої фігури та швидкість точки, вибраної за полюс?
4 Сформулюйте теорему про проекції швидкостей двох точок.
5 Що називається миттєвим центром швидкостей?
6 Як визначаються положення миттєвого центра швидкостей?
7 Де знаходиться миттєвий центр швидкостей плоскої фігури, яка здійснює миттєво поступальний рух?
8 Як розподіляються швидкості точок плоскої фігури відносно її миттєвого центра швидкостей?
9 Як визначається прискорення довільної точки плоскої фігури?
4 РУХ ТВЕРДОГО ТІЛА НАВКОЛО НЕРУХОМОЇ ТОЧКИ. РУХ ВІЛЬНОГО ТВЕРДОГО ТІЛА
4.1Кути Ейлера. Рівняння обертального руху тіла навколо нерухомої точки
Рух тіла, при якому одна його точка залишається нерухомою, називають обертанням навколо нерухомої точки або сферичним рухом.
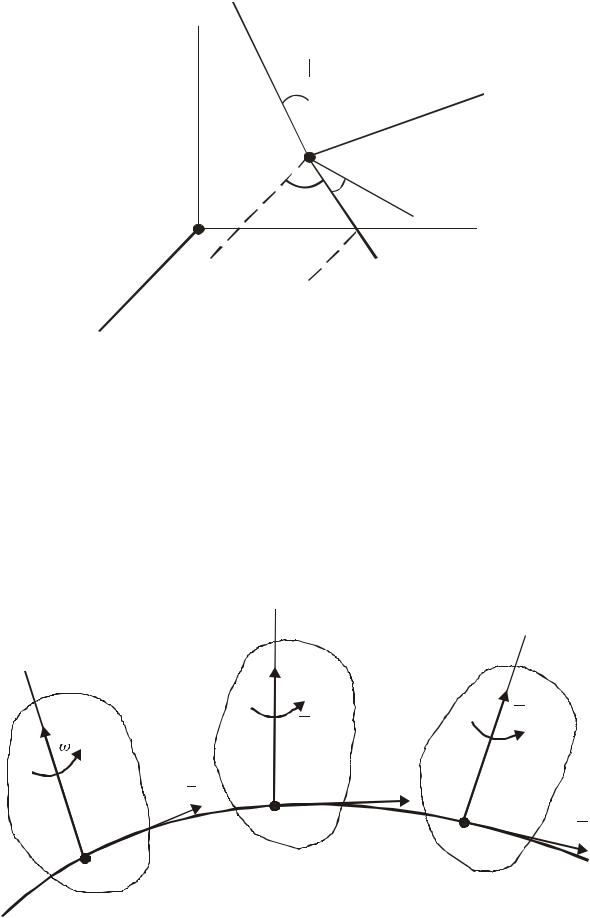
При такому русі тіло має три ступеня вільності і його положення визначається трьома незалежними параметрами-кутами Ейлера. Для встановлення цих параметрів проведемо через нерухому точку O тіла дві системи координат: нерухому Ox1 y1z1 та рухому Oxyz , жорстко зв’язану з тілом (рис. 98). На цьому рисунку лінія OK , яка називається лінією вузлів, є лінією перетину нерухомої координатної площини Ox1y1 та рухомої площини Oxy . Кутами Ейлера, які визначають положення рухомої системи координат і зв’язаного з ним тіла є :
- кут прецесії ψ між нерухомою віссю Ox1, та лінією вузлів OK ;
-кут нутації θ між нерухомою віссю Oz1 і рухомою віссю Oz;
-кут власного обертання ϕ між лінією вузлів OK і рухомою віссю
Ox .



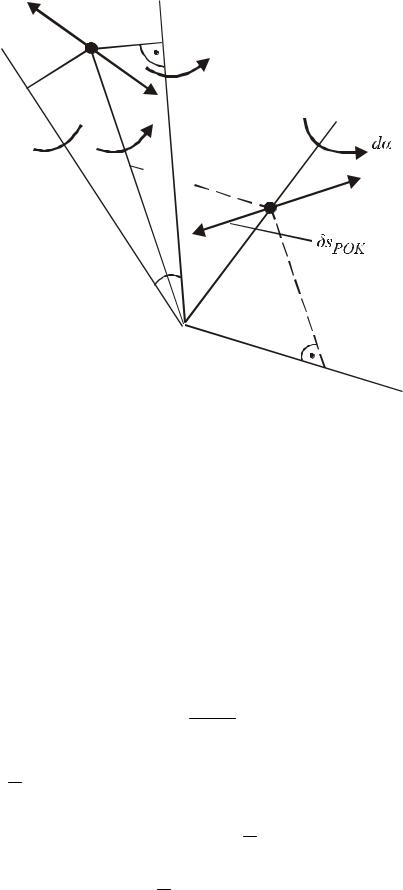
 ds
ds















 i
i


 – доосьове прискорення тіла в сферичній частині його руху навколо полюса
– доосьове прискорення тіла в сферичній частині його руху навколо полюса