

умк_Дегтярев_Геодезия_ч.1_2010г
.pdfв створе устанавливается вешка. При любом круге центр сетки нитей визируется на низ вешки и закрепляется алидада, а открепляется зрительная труба. Вешки теперь устанавливаются в створе по центру сетки нитей.
Вешение линии в случае отсутствия видимости между исходными точками, или невозможности с точки провести визирование, можно произвести следующим образом. На точки A и B устанавливаются вешки (рис. 2.26) и еще две вехи устанавливают таким образом, чтобы из пункта 1 была видна веха на точке В, а из пункта 2 – на точке А. Далее, например, вешка 1 выставляется в створе линии А-2, но так, чтобы была видна точка В, а вешка 2 – в створе линии 1'-В с видимостью А, вешка 1 – в створе линии А-2' и так далее до тех пор пока вехи 1 и 2 не выставятся в створе линии АВ по гребню возвышенности.
Через большие возвышения вешение производится тремя вехами. Здесь две вехи на возвышенности последовательно переводят друг друга третьей вехой в створ провешиваемой линии. Схема способа представлена на рис. 2.27.
A |
|
A |
B |
B |
|
||
|
|
||
1 |
2 |
|
|
1 |
|
1 |
|
3 |
2 |
|
2 |
||
|
|
|
||
|
|
|
|
Рис. 2.26. Схема вешения линии |
Рис. 2.27. Провешивание линии |
при невозможности визирования с ее концов |
через препятствие тремя вехами |
Второй фактор, влияющий на точность прямого изменения длины, это укладка мерной ленты в вертикальной плоскости. Самый простой случай, когда местность ровная и с наклоном менее вычисленного значения (рис. 2.28, а), при котором наклон можно не учитывать. Другой случай, когда местность по створу в вертикальной плоскости на протяжении всей длины изменяется равномерно (рис. 2.28, б), или часть достаточно горизонтальна, а часть достаточно равномерно изменяется (рис. 2.28, в). Самый общий и трудный случай, когда местность сильно изменяется произвольным образом (рис. 2.28, г). Для всех случаев достаточно прямолинейные участки измеряются в следующей последовательности. Выполняют два человека и при первом укладывании ленты передний, по указанию заднего, становится в створе измеряемой линии. Когда задний совместит
111
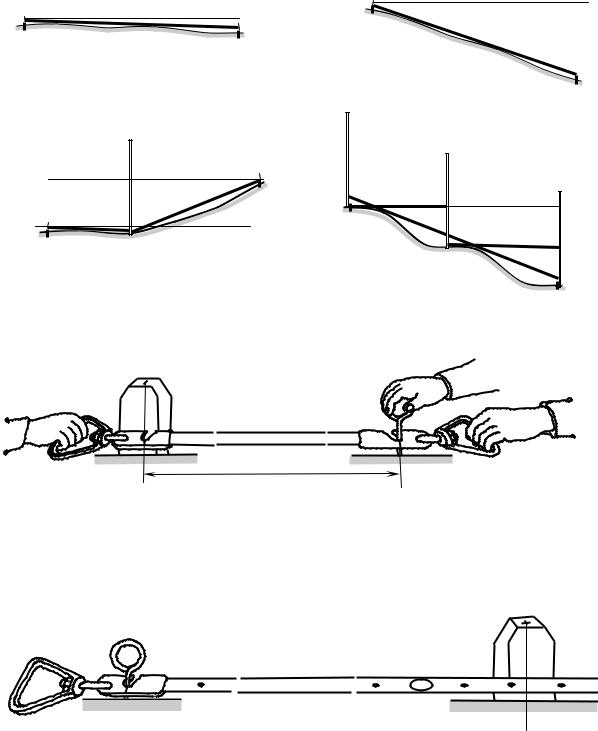
нулевой штрих ленты с началом линии, передний, встряхнув и натянув ленту в створе, вставляет в крючок ленты одну из шпилек, втыкая ее горизонтально в землю (рис. 2.29). После этого ленту перемещают вперед по линии и задний зацепляет ее своим крючком за шпильку. Направляя переднего по створу линии, повторяют процедуру, описанную выше.
А |
А |
|
В |
||
|
 В
В
а) |
б) |
В
А
А
В
в) |
|
г) |
|
|
Рис. 2.28. Схемы укладки ленты по вертикали |
|
|
|
20 метров
Рис. 2.29. Измерение полной укладки лентой
Оставшийся кусок линии, или домер, также измеряется полным растягиванием ленты и только после этого получением значения оставшейся части (рис. 2.30).
12
Рис. 2.30. Определение величины домера. Домер равен 12,23 м
112
Таким образом, измеряемое расстояние D будет равно номинальной длине мерного прибора l умноженной на число укладок n плюс величина
домера d:
D =l n + d . |
(2.24) |
Очевидно, что реальное значение расстояния должно учитывать поправку за компарирование и за наклон. Поправка за компарирование вводится в каждое уложение и в домер, пропорционально его длине:
комп. = n l + d |
l . |
(2.25) |
l |
|
|
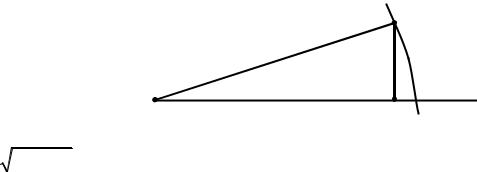
Здесь l – величина компарирования одного уложения. Поправка за наклон зависит от варианта измерения линии (см. рис. 2.28). Если необходим учет угла наклона, то есть ν > 2°, а на всем протяжении линии ее крутизна одинакова, то измеряют угол наклона всей линии. Если же отдельные части линии имеют различные значимые углы наклона, то измеряется каждый из них. Исправление линии за наклон можно произвести в двух видах: сразу вычислить приведенную к горизонту линию, или уменьшить
ее на величину поправки |
s. Рассмотрим рис. 2.31. |
|
||
Не сложно заметить, что |
|
|
||
горизонтальное |
проложение S |
D |
|
|
можно получить дважды, |
в за- |
|
||
h |
|
|||
висимости от |
дополнительных |
S |
|
|
измерений (угла наклона ν, или |
s |
|||
превышения h): |
|
Рис. 2.31. Схема для получения поправок |
||
S = D cos(ν) = |
D2 − h2 , |
(2.25) |
в длину за угол наклона |
|
|
|
|||
и других представлениях. Величина поправки s для приведения линии к горизонту S = D – s, также может быть получена в зависимости от дополнительных измерений:
s = D − S = D − D cos(ν) = D(1−cos(ν)) = |
2D sin |
2 |
|
ν |
≈ 0.5 sin |
2 |
(ν) , (2.26) |
||||
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
или из (2.25), считая D ≈ S и того, что |
|
h2 = D2 − S 2 = (D − S) (D + S) = |
|||||||||
= s (D + S) : |
|
|
|
|
|
|
|
|
|
||
|
h2 |
|
h2 |
|
|
|
|
|
|
||
s = |
|
≈ |
|
|
. |
|
|
|
|
|
(2.27) |
(D + S ) |
2D |
|
|
|
|
|
|||||
Последняя приближенная формула в (2.26) получена исходя из того, что при углах наклона меньше 10° синус угла изменяется пропорциональ-
но значению угла: sin(ν/ 2) ≈ 0,5sin(ν) .
113
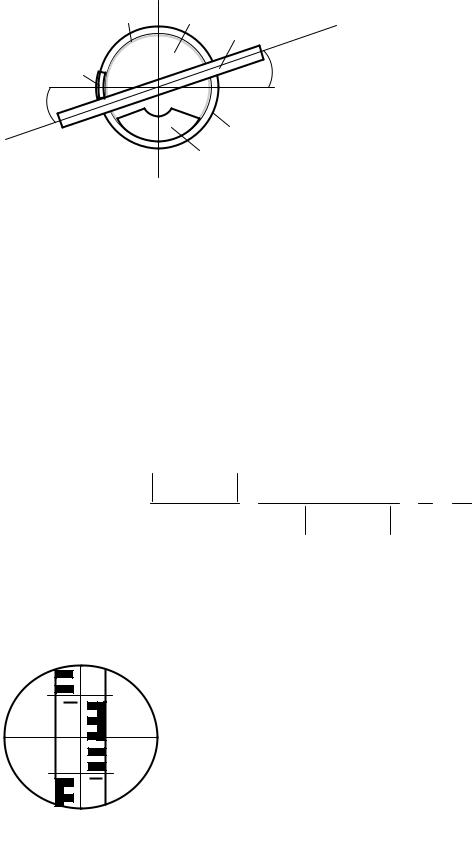
Вертикальные углы кроме теодолита для целей приведения линии к горизонту можно измерять эклиметром, схема которого приведена на рис. 2.32.
2 |
1 |
|
Прибор предназначен для |
||
|
приближенного измерения вер- |
||||
|
4 |
|
|||
5 |
|
ν |
тикальных |
углов |
с точностью |
|
10 – 30', что достаточно для це- |
||||
|
|
||||
ν |
|
|
лей горизонтирования линий. |
||
|
6 |
|
Эклиметр |
имеет |
внутреннее |
|
3 |
|
кольцо 1 с угловой шкалой 2 и |
||
Рис. 2.32. Схема эклиметра |
|
грузиком 3, и окошком для сня- |
|||
|
тия отсчетов 5. |
|
|||
|
|
|
|
||
На оси внутреннего кольца расположено визирное приспособление 4 и внешнее кольцо 6. В свободном состоянии грузик, скрепленный с внутренним кольцом и шкалой, стремится занять самое нижнее положение, формируя, таким образом, вертикальную и горизонтальную оси прибора. При наведении на измеряемую точку внутреннее кольцо со шкалой поворачиваются на угол наклона ν, величина которого считывается в отсчетном окошке.
Это одна из схем эклиметра. Существуют эклиметры на основе транспортира и отвеса и некоторые другие.
Следует учитывать, что измерения длины производятся как минимум 2 раза в прямом и обратном направлениях, а за окончательный результат берется среднее, если выполняется условие
|
Dпр − Dобр |
|
1 |
1 |
1 |
|
|
|
|
Dср |
|
= (Dср / Dпр − Dобр )= |
A ≤ |
M . |
|
(2.28) |
|
Здесь знаменатель А вычисляют до двух значащих цифр, а величина |
||||||||
знаменателя М в допуске для топографии принимается от 1000 для небла- |
||||||||
гоприятных условий, до 3000 для измерений с повышенной точностью. |
||||||||
При измерении длины линии нитяным дальномером, теодолит цен- |
||||||||
трируют над начальной точкой линии и приводят в рабочее положение. |
||||||||
|
|
Далее наводят на рейку и берут отсчеты по верх- |
||||||
11 |
1092 |
нему и нижнему дальномерным штрихам (см. |
||||||
|
рис. 2.32). Затем вычислив l как разность отсче- |
|||||||
|
|
тов и умножив его на реальный коэффициент |
||||||
|
1193 |
дальномера К, получить значение дальномерного |
||||||
12 |
расстояния. |
Согласно |
рис. |
2.33 |
и |
получив |
||
Рис. 2.33. Взятие отсчетов |
К = 100, расстояние D = (1193 – 1092)×100 = |
|||||||
= 1010 мм = 10,1 м. |
|
|
|
|
||||
по дальномерным нитям |
|
|
|
|
|
|
|
|
114

Еще одна проблема при измерениях – не перпендикулярность визирной оси рейке (рис. 2.34). Очевидно, что формула для определения длины D = K l применима, когда угол наклона и соответственно неперпендикулярность визирного луча рейке, в пределах оговоренных допусков. При измерениях на местности часто углы наклона значительны, что приводит к неперпендикулярности со значением угла наклона ν и вместо правильного отсчета MN = l будет взят отсчет M'N' = l'. Несложно заметить, что эти отсчеты (рис. 2.34) связаны соотношением l = l' cos(ν). Подставив это выражение в формулу для нитяного дальномера, получим D = K l = = K l' cos(ν). Но измеренное наклонное расстояние D приводится к горизонту как S = D cos(ν), откуда окончательно:
|
S = D cos(ν) = K l' cos2(ν). |
|
(2.29) |
|
|
D |
M |
|
M' |
|
|
|||
|
|
|
||
|
ν |
O |
|
|
|
|
|
|
|
|
|
N' |
|
N |
|
ν |
|
|
|
|
|
|
|
|
|
2 |
|||
|
|
|
||
|
|
|
||
|
|
|
||
|
|
|
|
ν |
|
S |
|
|
|
1
Рис. 2.34. Схема вычисления горизонтального проложения по нитяному дальномеру
Не сложно заметить, что точность определения длины нитяным дальномером зависит от точности снятия отсчетов, которые в свою очередь зависят от величины расстояния и увеличения прибора. Так, при снятии отсчетов до миллиметров, точность длины будет до десятков сантиметров.
Для достаточно общего случая можно записать: |
|
||||
|
(D + D) = K (l + l) = K l + K l, |
|
|||
где |
D – погрешность в расстоянии, вызванная погрешностью |
l в от- |
|||
счете по рейке. Из формулы имеем: |
|
|
|
||
или в относительной форме: |
D = K |
l, |
|
(2.30) |
|
|
|
|
|
||
|
D |
= K l |
= |
l . |
(2.30а) |
|
D |
K l |
|
l |
|
|
|
115 |
|
|
|

При благоприятных условиях измерений для расстояния в 100 м (l = 100 делений) погрешность отсчета модно принять в 1/4 деления. Под-
ставив эти значения в (2.30а) получим DD = 4001 . при учете других факто-
ров погрешность измерения расстояния нитяным дальномером обычно находится в пределах 1/200 – 1/400, принимаемая в среднем как 1/300.
Косвенные методы линейных измерений. Косвенные аналитиче-
ские методы определения расстояний делят на методы определения неприступного расстояния и методы определения расстояния между недоступными точками. Как те, так и другие могут быть как однобазисные, так и многобазисные, но с обязательным контролем измерений и вычислений.
При определении неприступного расстояния с использованием одного базиса его определяют как сторону треугольника, в котором измерена одна сторона (базис) и все три угла. Тогда (рис. 2.35) искомое расстояние S будет на основании теоремы синусов получено как:
S =b sin(γисп) . (2.31) sin(βисп)
Здесь b – достаточно точно измеренное опорное расстояние, называемое базисом, при необходимости приведенное к горизонту. Базис выбирают по возможности на ровной, удобной для непосредственного измерения линии местности и измеряют в прямом и обратном направлениях с обычным контролем. γисп, βисп – исправленные определенным образом измеренные углы γ и β. Так как расстояние по формуле (2.31) получается бесконтрольным, а он необходим, то в качестве его используют измерение третьего угла в треугольнике, хотя в принципе достаточно двух. Сложив три измеренных угла в треугольнике, смотрят меру отличия практической суммы от теоретического значения, равного 180°. Это отличие fβ, называемое невязкой, не должно превосходить допустимой величины fβдоп, связан-
ной с точностью прибора mβ и числом измеренных углов n: |
|
||
fβ |
доп |
= 2 mβ n . |
(2.32) |
|
|
|
|
Если вычисленная невязка меньше допустимой, в каждый измеренный угол вводят поправку, равную − fβ /3 , получая таким образом исправ-
ленные углы для формулы (2.31) и контроль измерений.
Из многобазисных схем чаще всего используется двухбазисная, в разных комбинациях (рис. 2.36, а, б, в).
116

B
β
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α |
|
|
b |
|
|
γ |
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
C |
|
|
|
|
|
Рис. 2.35. Схема однобазисного определения неприступного расстояния |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
b2 |
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
β2 |
||
|
|
|
|
|
|
|
|
B |
|
|
α |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|||
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
α1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
β1 |
|
А |
|
|
|
|
|
|
|
|
|
|
β1 |
|
|
|
|
||
|
α |
β1 α |
|
β2 |
|
|
α |
α2 |
|
|
|
|
b1 |
||
|
|
|
|
|
|
|
|
|
|||||||
А |
1 |
2 |
|
А |
1 |
b2 |
C |
|
D |
|
|
||||
b1 |
|
|
b2 |
C |
|
β2 |
|
|
|
|
|
|
|||
|
D |
|
|
|
b1 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
D |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
б) |
|
|
|
|
|
в) |
|
|
Рис. 2.36. Схемы двухбазисного определения неприступного расстояния |
|
|||||||||||||
Теперь в качестве контроля служит определение стороны AB = S из двух треугольников по формуле (2.31), но по измеренным углам. Далее по формуле (2.28) сравниваются значения длин и в случае допустимого расхождения принимается в качестве конечного результата среднее из результатов измерений. Дополнительное измерение третьего угла в треугольнике возможно, но не требуется, а так как он необходим, то его вычисляют обычным способом.
При определении расстояния между недоступными точками рассматривают два случая (рис. 2.37, а, б). В первом случае для определения расстояния S измеряют расстояния D1, D2 и угол β. Используя теорему косинусов находят искомую длину. Определение бесконтрольное, поэтому использование без большой нужды не целесообразно. Во втором варианте (рис. 2.37, б) необходимая длина S вычисляется из двух треугольников
117
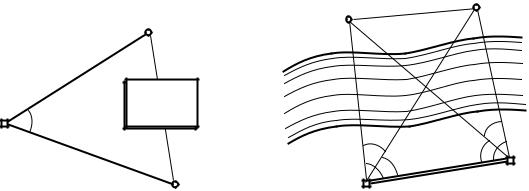
ABC и ABD по теореме косинусов по измеренным углам α2 и β2, и вычисленным сторонам a и d в треугольнике ABC и b, c в треугольнике ABD. Стороны в свою очередь вычисляются по теореме синусов по измеренным величинам α, β, α1, β1 и базису b. Контроль двух вычисленных значений производится обычным способом по формуле (2.28).
|
|
A |
|
|
А |
S |
B |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
D1 |
|
|
|
|
|
e |
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
a |
c |
|
|
C |
β |
|
|
|
|
β2 |
|
|
|
|
|
|
α2 |
|
|||
|
|
|
S |
|
|
β1 |
β |
|
|
|
|
|
|
α1 |
|||
|
D2 |
|
|
|
|
|
D |
|
|
|
|
B |
|
α |
b |
||
|
|
|
|
|
C |
|
||
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
б) |
|
|
Рис. 2.37. Схемы определения расстояния между недоступными точками |
|
||||||
2.5. Графические измерения. Средства и методы
Основные вопросы: общие положения и схемы графических измерений; состав мензульного комплекта; производство измерений по номограмме кипрегеля; поверки комплекта мензулы.
Общие положения и схемы графических измерений. При графи-
ческих измерениях определяемые величины не получают в виде числа, а только в виде их графического представления. Очевидно, что для целей геодезии этими определяемыми величинами могут быть:
–горизонтальный угол;
–расстояние;
–точка положения (на основе предыдущих).
При выполнении графических измерений используют определенные средства и методы измерений. Из средств, в самом общем случае, должен быть столик (табула, планшет) на штативе и линейка с визирным устройством (например, диоптрой см. М-1). В таком виде средство для графических измерений было введено в XVI веке Преториусом и получило название мензульный комплект (хотя, судя по историческим гравюрам и текстам, было известно намного раньше).
118

Общая схема измерений была следующая:
На расположенном на столике листе бумаги наносят точки с известными координатами и центрируют столик над точкой стояния на местности (рис. 2.38). Если необходимо – проводят ориентировку столика по точкам.
A
c |
β |
β |
|
|
B
 C
C
Рис. 2.38. Определение угла графическим методом
Используя визир, прочерчивают на планшете направление СА через точку стояния С в направлении визирования на А. Такое же направление прочерчивают в направлении В, развернув соответствующим образом линейку и полусая направление СВ. Таким образом, графическое представление угла АСВ есть угол β на листе планшета.
Для определения расстояния до точки, или ее положения на плоскости, используют следующую последовательность действий (рис. 2.39):
1.Отцентрировать столик над точкой a и сориентировать в направлении точки b, которая должна быть и на планшете и на местности.
2.Свизировать линейкой с визиром относительно точки стояния a в направлении определяемой точки X, прочерчивая на листе планшета направление a – X (положение 1 на рис. 2.39).
3.Перенести столик на другую исходную точку, например b, и сориентировать планшет в направлении исходной точки, например a.
4.Свизировать линейкой с визиром относительно точки стояния b в направлении определяемой точки X. Прочертим на листе планшета направление b – X, пересечение которого с нанесенным направлением a – X и дает на планшете положение x определяемой точки местности X (положение 2 на рис. 2.39), а также графическое представление расстояний a – X и b – X.
119
 X
X
x
b
a 
2
b
1 |
a |
Рис. 2.39. Определение расстояния и положения графическим методом
Очевидно, что центрировка и ориентировка столика может производиться с использованием любого набора точек с известными координатами, которые существуют на местности и нанесены на планшет.
Такой метод определения положения точки получил название гра-
фической прямой угловой однократной засечки.
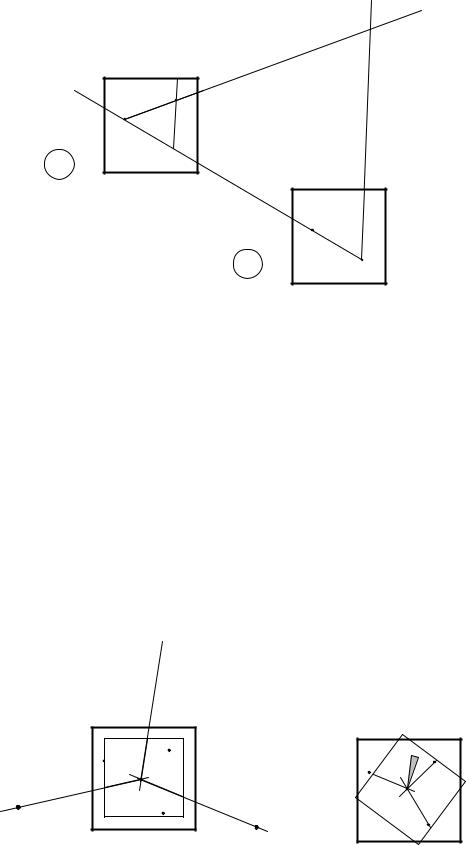
Если нет возможности установить столик на исходную (то есть нанесеннуюнапланшет) точкунаместности, тоиспользуютследующуюметодику:
1.Имея на планшете и на местности не менее трех исходных точек, устанавливают столик над определяемой точкой на местности, не центрируя и не ориентируя его.
2.На планшете, на район предположительного нахождения определяемой точки кнопками прикрепляют кусок кальки с нанесенной примерно
всередине определяемой точкой (например, х на рис. 2.40, а).
 B
B
a |
b |
b |
|
||
x |
|
a |
A |
|
x |
c |
C |
c |
|
|
|
а) |
|
б) |
Рис. 2.40. Определение положения точки методом Болотова:
а – прочерчивание направлений; б – поворот кальки с совмещением
120