

1.4 Интегрирующие rc-цепи.
Интегрирующей цепью называют четырёхполюсник, сигнал на выходе которого пропорционален интегралу от входного сигнала. В случае, когда входной и выходной сигналы выражаются в одинаковых единицах (например, в единицах напряжения), операцию, выполняемую интегрирующей цепью, можно записать в виде соотношения:
![]() ,
,
где К – коэффициент пропорциональности, имеющий разрядность с-1.
На рис.1.30 приведена
принципиальная схема интегрирующей
цепи. Пусть
![]() ,
что практически имеет место при
,
что практически имеет место при![]() цепи;
цепи;
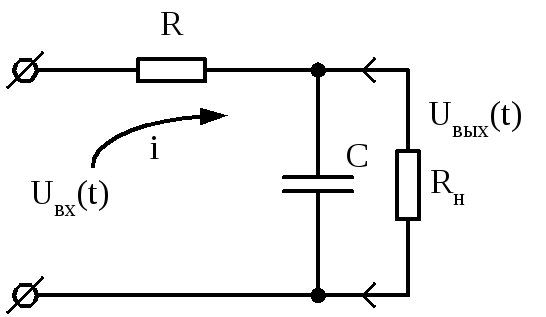
Рис. 1.30 - Принципиальная схема интегрирующей RC-цепи.
Интегрирующие цепи часто применяют для удлинения импульсов или для получения напряжения, изменяющегося по закону, близкому к линейному.
Для интегрирующей цепи:
![]() ,
,
значение тока в цепи
![]() .
.
Подставив значение тока в формулу
![]() ,
получим:
,
получим:
![]() .
.
Для получения идеальной интегрирующей
цепи необходимо, чтобы выполнялось
условие
![]() ,
тогда получим:
,
тогда получим:
![]() .
.
Для того, чтобы обеспечить низкий
коэффициент передачи цепи, т.е.
![]() (
(![]() ),
необходимо обеспечить условие
),
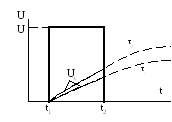
необходимо обеспечить условие![]() (см. рис.1.31).
(см. рис.1.31).
![]()
Рис. 1.31
Угол наклона прямой на выходе интегрирующей
цепи пропорционален амплитуде
интегрируемого напряжения (импульса)
и обратно пропорционален постоянной
времени цепи
![]() .
.
Следовательно для того чтобы цепочка точно интегрировала необходимо выполнение следующих условий:
 ;
; .
.
В период действия импульса (![]() ):
):
![]() ,
значит
,
значит![]() .
.
В момент времени
![]() напряжение на выходе цепи будет:
напряжение на выходе цепи будет:
![]() .
.
Погрешности интегрирующей цепи:
На рис.1.32 показано выходное напряжение интегрирующей RC-цепи, где:

Реальное напряжение интегрирующей цепи
 .
.Напряжение на выходе идеального интегратора;
Рис. 1.32
При
![]() цепочка
работает практически без погрешности.
цепочка
работает практически без погрешности.
Определим максимальную погрешность, имеющую место в конце импульса.
![]() ;
; ;
;
где
![]() - максимальное значение абсолютной и
- максимальное значение абсолютной и![]() - относительной погрешности.
- относительной погрешности.
Значение погрешности при
![]() составит:
составит:
 .
.
Возможно провести оценку погрешности в другом виде:
![]() – для реального интегратора, а
– для реального интегратора, а
![]() – для идеального интегратора.
– для идеального интегратора.
Тогда,
![]() .
.
Подставив значение
![]() ,
выраженное через
,
выраженное через![]() ,
получим:
,
получим:
![]() .
.
Упростив выражение, при выполнении
условия
![]() ,
получим ориентировочное значение
относительной погрешности интегрирующей
цепи:
,
получим ориентировочное значение
относительной погрешности интегрирующей
цепи:![]() .
Если
.
Если![]() ,
то
,
то![]() .
.
Недостатки интегрирующих RC-цепей:
если
 велико (сотни миллисекунд и более) то
требуется получения больших постоянных
времени (десятки секунд), что
неконструктивно;
велико (сотни миллисекунд и более) то
требуется получения больших постоянных
времени (десятки секунд), что
неконструктивно;При больших значениях СиRцепи затрудняется её согласование с сопротивлением нагрузки, что увеличивает погрешность цепи.
В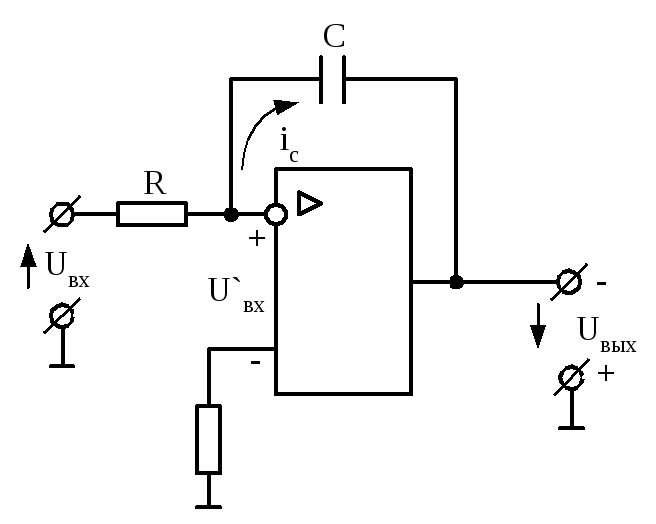 таких случаях целесообразно применять
интеграторы на операционных усилителях
(ОУ). Схема интегратора приведена на
рис.1.33.
таких случаях целесообразно применять
интеграторы на операционных усилителях
(ОУ). Схема интегратора приведена на
рис.1.33.
Рис. 1.34 - Принципиальная схема интегрирующей RC-цепи с применением ОУ
Для данной схемы, пренебрегая входным током ОУ в соответствие с I-м законом Кирхгофа для инвертирующего входа усилителя получим:
![]() ;
;
отсюда следует: ![]() + начальные условия;
+ начальные условия;
Начальные условия на выходе усилителя можно задавать с помощью схемы установки нуля ОУ, а изменять постоянную времени интегрирования переключением конденсатора С.