

7.1 Общая характеристика и принципы построения глин.
7.2 Автоколебательные ГЛИН на транзисторах.
7.3 Ждущие ГЛИН на транзисторах.
7.4 ГЛИН на ОУПТ.
7.1 Общая характеристика и принципы построения ГЛИН.
Линейно изменяющимся напряжениемназывается напряжение, которое в течение некоторого времени изменяется по закону близкому к линейному, а затем быстро возвращается к первоначальному уровню. Напряжение, изменяющееся от меньшего уровня к большему, называется линейно возрастающим, а напряжение, изменяющееся от большего уровня к меньшему — линейно падающим. Такие напряжения также называют напряжениями пилообразной формы. На рис 7.1. приведен график линейно изменяющее напряжение, где:
![]() —
длительность прямого или рабочего хода;
—
длительность прямого или рабочего хода;
![]() —
длительность обратного хода;
—
длительность обратного хода;
![]() —
длительность паузы;
—
длительность паузы;
![]() —
период колебаний;
—
период колебаний;
![]() —амплитуда напряжения.
—амплитуда напряжения.
Пилообразное напряжение также характеризуется частотой:
![]() ,
,
где
![]()
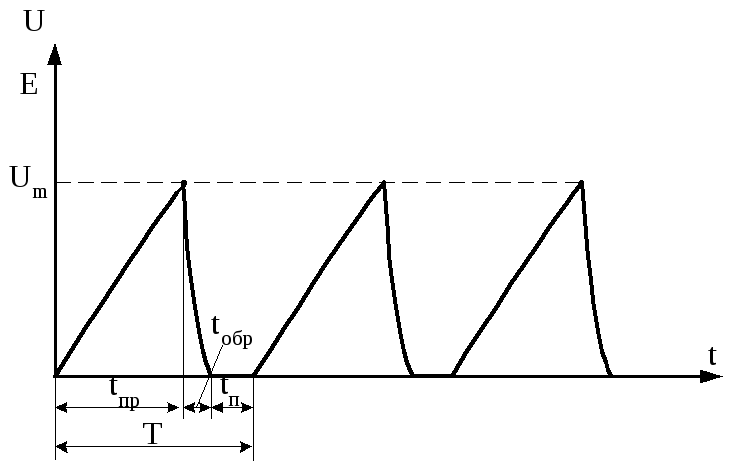
Рис. 7.1. Линейно изменяющееся напряжение
Существует два принципа создания ЛИН:
С использованием RC-цепочки (см. рис. 7.2.). Идея принципа — использование линейного начального участка экспоненты
 при заряде конденсатора С от источника
э.д.с Е через сопротивлениеR.
Для быстрого разряда конденсатора С
применяется ключS.
при заряде конденсатора С от источника
э.д.с Е через сопротивлениеR.
Для быстрого разряда конденсатора С
применяется ключS.
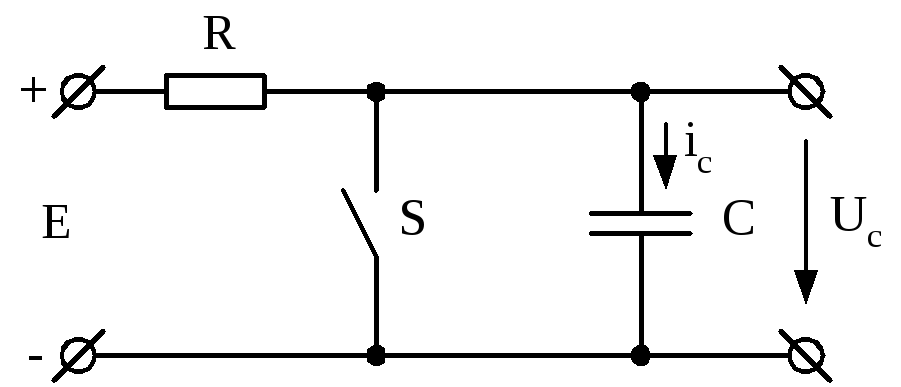
Рис. 7.2.
При разомкнутом ключе Sформируется прямой ход ЛИН, при замкнутом—
обратный. В зависимости от степени
нелинейности начального участка
экспоненты амплитуда
![]() может достигать значений 0,30,6
от Е. Следовательно, основным недостатком
схемы является низкий коэффициент
использования напряжения Е.
может достигать значений 0,30,6
от Е. Следовательно, основным недостатком
схемы является низкий коэффициент
использования напряжения Е.
Заряд конденсатора С через токостабилизирующий элемент (ТСЭ) (см.рис 7.3.).
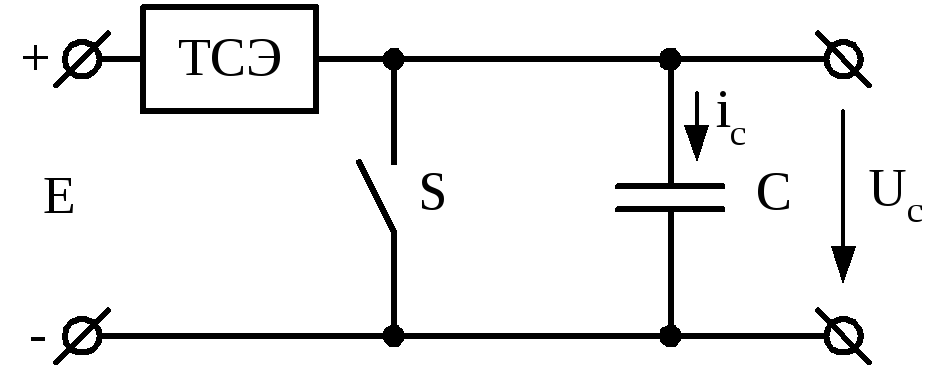
Рис. 7.3.
Поскольку напряжение на конденсаторе С определяется выражением:
![]() ,
,
то при стабилизации тока заряда конденсатора i=const, получим:
![]() .
.
Следовательно, напряжение на конденсаторе С изменяться по линейному закону в функции времени t. Для стабилизации тока в качестве ТСЭ часто используют биполярный транзистор, включенный по схеме с общей базой.
Основными параметрами ГЛИН являются:
Коэффициент нелинейности
![]() ,
,
где
![]() производная выходного напряжения (
производная выходного напряжения (![]() )в соответствующий момент времени,
характеризующаяся тангенсом угла
наклона касательной к
)в соответствующий момент времени,
характеризующаяся тангенсом угла
наклона касательной к
![]() .
Разница между тангенсами углов наклона
определяет погрешность (см. рис. 7.4.).
.
Разница между тангенсами углов наклона
определяет погрешность (см. рис. 7.4.).
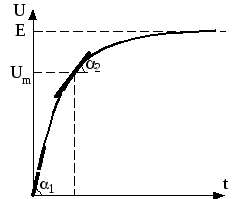
Рис. 7.4.
Коэффициент использования напряжения
 ,
характеризуется отношением амплитуды
пилы к подводимому напряжению
,
характеризуется отношением амплитуды
пилы к подводимому напряжению
![]()
Чем больше
![]() ,
тем больше погрешность ГЛИН дляRCцепочки, т.к. используется большой
участок экспоненты. Следовательно,
увеличивая
,
тем больше погрешность ГЛИН дляRCцепочки, т.к. используется большой
участок экспоненты. Следовательно,
увеличивая
![]() ,получаем большой коэффициент
нелинейности
,получаем большой коэффициент
нелинейности
![]() .
.
Для первой схемы
![]() .
.
При
![]() получим
получим
![]() .
.
Тогда
![]() .
.
При значениях коэффициента использования напряжения =(0,5…0,7) погрешность нелинейностидостигает величины 10-20 %.
Для получения малых значений при больших нелинейностяхрекомендуют применять схему с ТСЭ.
ГЛИН можут работать в следующих режимах:
Автоколебательный;
Ждущий;
Режим синхронизации;
Выделяют также режим внешнего управления, как разновидность ждущего режима. В этом режиме длительность рабочего хода определяется длительностью управляющего импульса.
В ждущем режиме начало прямого хода определяет короткий управляющий импульс, а длительность прямого хода определяется времязадающими напряжениями ГЛИН.
В режиме синхронизации — частота ГЛИН кратна частоте внешних синхронизирующих импульсов.
Автоколебательная схема работает без внешних управляющих импульсов.