

3.4 Пример м 3 – Принцип Даламбера
С невесомым валом АВ (рис.3.3), вращающимся с постоянной угловой скоростью , жестко скреплен невесомый стержень О1 D длиной l1 и имеющий на конце груз массой т1 и шарнирно однородный стержень О2 Е длиной l1 и массой т2. Дано в1 = 0,6 м, в2 = 0,2 м, в3 = 0,2 м, = 60, l1 = 0,4 м, т1 = 3 кг, l2 = 0,33 м, т2 = 5 кг, = 5 с-1.
Определить: реакции подшипника А и подпятника В.

Рисунок 3.3
Решение:
Для определения искомых реакций
рассмотрим движения механической
системы, состояний из вала АВ,
невесомого стержня ОD
с грузом т1
и шарнирно однородный стержень О2Е,
применим принцип Даламбера. Проведем
вращающиеся вместе с валом оси Аху
так, чтобы стержень лежал в плоскости
Аху,
и изобразим действующие внешние силы:
силы тяжести
![]() и
и![]() ,
составляющиеХА,
УА
реакции подпятника и реакции ХВ
подшипника.
,
составляющиеХА,
УА
реакции подпятника и реакции ХВ
подшипника.
Согласно
принципу Даламбера присоединим к этим
силам силы инерции элементов стержня
и груза, считая груз материальной точкой.
Так как вал вращается равномерно (
= const),
то элементы стержня имеет только
нормальные ускорения,
![]() направленные к оси вращения, а численно
направленные к оси вращения, а численно![]() ,
гдеhк
– расстояние элемента от оси. Тогда
силы инерции d
Фк
будут направлены от оси вращения и
численно d
Фк
=
тк
Wпк
=
тк
2
hк,
где
тк
– масса к-ти элемента стрежня. Поскольку
все d
Фк
пропорционально hк,
то эпюра этих параллельных сил образует
треугольник и их можно заменить
равнодействующей
,
гдеhк
– расстояние элемента от оси. Тогда
силы инерции d
Фк
будут направлены от оси вращения и
численно d
Фк
=
тк
Wпк
=
тк
2
hк,
где
тк
– масса к-ти элемента стрежня. Поскольку
все d
Фк
пропорционально hк,
то эпюра этих параллельных сил образует
треугольник и их можно заменить
равнодействующей
![]() линия действия которой проходит через,
центр тяжести этого треугольника, т.е.
расстоянииН2
от вершины 02,
где
линия действия которой проходит через,
центр тяжести этого треугольника, т.е.
расстоянииН2
от вершины 02,
где
![]()
Но,
как известно, равнодействующая любой
системы сил равна ее главному вектору,
а численно главный вектор сил инерции
стрежня 2 Ф2
= т2
WС2,
где WС2
– ускорение центра масс стержня: при
этом, как и для любого элемента стержня,
WС
= WСп
= 2
hС
=
![]() В результате получим.
В результате получим.
![]()
Учитывая стержень 2 шарнирно закреплено в точке 02, вращающий момент относительно т0 (Fк) = 0; для стержня 2, мы сможем определить угол отклонение стрежня 2.
![]()
или учитывая выражение Ф2 мы получим такое соотношение для угол .
![]() следовательно
следовательно
![]()
и
![]() и
и
![]()
Аналогично сила инерции Ф1 груза найдем, что она тоже направлена от оси вращения, а численно Ф1 = т2 2 l1 sin = 51,6 Н.
Так как все действующие силы и силы инерции лежат в плоскости 0ху, то и реакции подпятника А и подшипника В тоже лежат в этой плоскости 0ху, что было учтено при их изображении.
По принципу Даламбера, приложенные внешние силы и силы инерции образуют уравновешенную систему сил. Составляя для этой плоской системы сил три уравнения равновесия, получим.
![]() (1)
(1)
![]() (2)
(2)
 (3)
(3)
Подставим сюда числовые значения всех заданных и вычисленных величин и решив систему уравнений, найдем искомые реакции.
Ответ: ХА = 3,9 Н. УА = 78,4 Н. ХВ = 68,3 Н.
4. Растяжение и сжатие
4.1 Основные понятия
Растяжением или сжатием называется такой вид деформации, при котором в любом поперечном сечении бруса возникает только продольная сила – N (рис. 3.1), с учетом вес бруса длиной z Pz = Az, где: - удельный вес балки;
А – площадь поперечного сечения балки.
Составим уравнения равновесия
![]()
Отсюда
![]()

Рисунок 4.1
Полное напряжение в данной точке на данной элементарной площадке – dA есть отношение (рис.4.2):
![]() (4.1)
(4.1)
где
![]() -
элементарная сила.
-
элементарная сила.
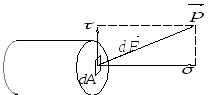
Рисунок 4.2
Проекция на её нормаль называется нормальным напряжением - , а на площадку – касательным напряжением . (рис.4.2).
Полное напряжение вычисляется по формуле:
![]() (4.2)
(4.2)
Деформацией называется относительное удлинение элемента (рис.4.3)
![]() (4.3)
(4.3)
В случае растяжения и сжатия стержня, предполагается, что нормальные напряжения по сечению распределены равномерно, что дает возможность определить их по формуле:
![]() (4.4)
(4.4)
Используем формулу (3.3) и закона Гука (Е – модуль упругости).
![]() (4.5)
(4.5)
Выводим формулу для определения перемещений
![]() (4.6)
(4.6)
Величина
ЕА
– называется жесткостью стержня при
растяжении сжатии. Формула (4.6)
применяется, если N
и ЕА
постоянны по длине
![]() .
ЕслиN
и ЕА
переменны, то формула примет вид:
.
ЕслиN
и ЕА
переменны, то формула примет вид:
![]() (3.7)
(3.7)
При проработке этого раздела следует учесть коэффициент Пуассона, характеризующий деформацию в поперечном сечении и обозначаемой буквой , вычисляется по формуле:
=![]() (3.8)
(3.8)
где /– поперечная деформация,
– относительная.
![]()































![]()
![]()
![]()
![]()
![]()
F
Рисунок 4.3
![]() және,
и
және,
и
![]() (4.9)
(4.9)
Коэффициент Пуассона изменяется в пределах от 0 до 0,49.
Три типа задач при расчетах на растяжение (сжатие):
Проверка прочности и жесткости
Подбор геометрических параметров сечения.
Определение допустимых нагрузок.