

4. Показатели качества систем автоматического управления
4.1. Оценка качества регулирования при стандартных воздействиях
К процессам управления предъявляются три основных требования: по точности в установившемся режиме, по устойчивости и по качеству переходных процессов.
Основной задачей автоматического управления является обеспечение качества работы системы при известных возмущениях, управляющих воздействиях и заданных ограничениях на параметры системы.
Качество управления - это комплекс требований, которые определяют поведение системы в установившемся и переходном режимах отработки управляющего воздействия.
В теории автоматического управления решаются, в основном, две задачи.
Задача анализа (исследования) системы - установить, какое влияние оказывает структура системы и значения ее параметров на процесс управления и показатели его качества, а также выяснить, насколько та или другая система соответствуют предъявляемым к ней требованиям.
Задача синтеза системы - выбор структуры и параметров системы управления в соответствии с требованиями качества.
В большинстве случаев исследования проводятся при подаче на вход системы типовых воздействий. К ним относятся единичное ступенчатое воздействие и гармонический сигнал.
Единичное воздействие
(рис. 4.1) - функция, которая принимает
значение
![]() при значениях времени
при значениях времени![]() ,
в других случаях эта функция равняется
,
в других случаях эта функция равняется![]() :
:
|
|
(4.1) |
 .
.
Р исунок
4.1 - Единичный ступенчатый сигнал
исунок
4.1 - Единичный ступенчатый сигнал
Для определения полосы частот пропускания в качестве входного управляющего воздействия используют гармонический сигнал:
|
|
(4.2) |
где
![]() - амплитуда;
- амплитуда;![]() - угловая частота,
- угловая частота,![]() - начальная фаза.
- начальная фаза.
Рассмотрим
показатели качества переходного процесса
при подаче на вод системы единичного
ступенчатого воздействия. Переходная
характеристика системы
![]() ,
которая является реакцией системы на
единичный сигнал
,
которая является реакцией системы на
единичный сигнал![]() ,
изображена на рис. 4.2.
,
изображена на рис. 4.2.
Р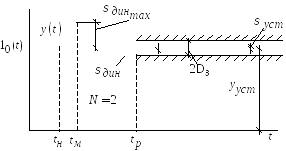 исунок
4.2 - Показатели качества системы
автоматического управления
исунок
4.2 - Показатели качества системы
автоматического управления
Основные показатели качества.
 - время первого
достижения установившегося значения.
- время первого
достижения установившегося значения. - время достижения
первого максимума.
- время достижения
первого максимума. -
установившееся значение выходного
сигнала, определяющее статическую
точность системы.
-
установившееся значение выходного
сигнала, определяющее статическую
точность системы.Статическая ошибка системы (установившееся рассогласование), показывает, насколько значение выходного сигнала отличается от заданной величины
 ,
,(4.3)
Время регулирования
 - основная характеристика быстродействия
системы, определяемая из условия:
- основная характеристика быстродействия
системы, определяемая из условия:
-
 ,
,(4.4)
где
![]() – заданное значение, определяемое
точностью системы.
– заданное значение, определяемое
точностью системы.
Динамическое отклонение
 - характеризует плавность протекания
переходного процесса. Определяется
как отклонение выходного сигнала
- характеризует плавность протекания
переходного процесса. Определяется
как отклонение выходного сигнала от заданного значения выходной величины
в местах перегиба графика переходного
процесса.
от заданного значения выходной величины
в местах перегиба графика переходного
процесса.Максимальное динамическое отклонение
 - наибольшее значение из всех динамических
отклонений.
- наибольшее значение из всех динамических
отклонений.Перерегулирование - безразмерная величина, определяемая как отношение максимального динамического отклонения к установившемуся значению, взятое в процентах:
-
 .
.(4.5)
Колебательность
 - число динамических отклонений за
время регулирования
- число динамических отклонений за
время регулирования .
.
В качестве примера
рассмотрим звено с передаточной функцией
 .
Переходная характеристика этого звена
изображена на рис. 4.3.
.
Переходная характеристика этого звена
изображена на рис. 4.3.
Р исунок
4.3 - Переходная характеристика
колебательного звена
исунок
4.3 - Переходная характеристика
колебательного звена
Определим по переходной характеристике показатели качества переходного процесса:
установившаяся ошибка -
 ,
,время регулирования -
 с,
с,максимальное динамическое отклонение -
 ,
,перерегулирование -
 ,
,колебательность -
 .
.