

3. Измерение направления (пеленга) от собственного судна на любой объект.
3.1 Пример рассматривается с использованием ситуации “RLS1.tsk”, методика загрузки ситуации на исполнения в главе 2.7.
3.2 Подвести курсор трекбола на кнопку
![]() ,
которая находится в нижней левой части
экрана, рис.2.4.84 обведена красным
прямоугольником, нажать ЛКТ.
,
которая находится в нижней левой части
экрана, рис.2.4.84 обведена красным
прямоугольником, нажать ЛКТ.

рис.2.4.84
3.3 На ИКО появится подвижные линии измерения пеленга (визири) они отображаются в виде синих пунктирных линий исходящих из центра ИКО до края ИКО, рис.2.4.85, первый визирь обозначен цифрой «1», второй визирь — цифрой «2». Для измерения пеленга визирем номер «1» надо подвести курсор трекбола на ручку “EBL”, рис.2.4.84, обведена зеленным прямоугольником, нажать ЛКТ и удерживая ЛКТ нажатой вращать за часовой стрелкой, линия визиря номер «1» будет передвигаться по направлению часовой стрелки, таким образом линию можно подвести к любому месту внутри ИКО и направления от собственного судна к тому месту которое пересекает линию (пеленг) будет отображаться в месте отображения информации “EBL”, рис.2.4.85, обведено красным прямоугольником, верхняя строка обведена зеленым прямоугольником обозначающим, что в данное время активно визирь номер «1», рис.2.4.86. Пеленг измеряется в градусах.
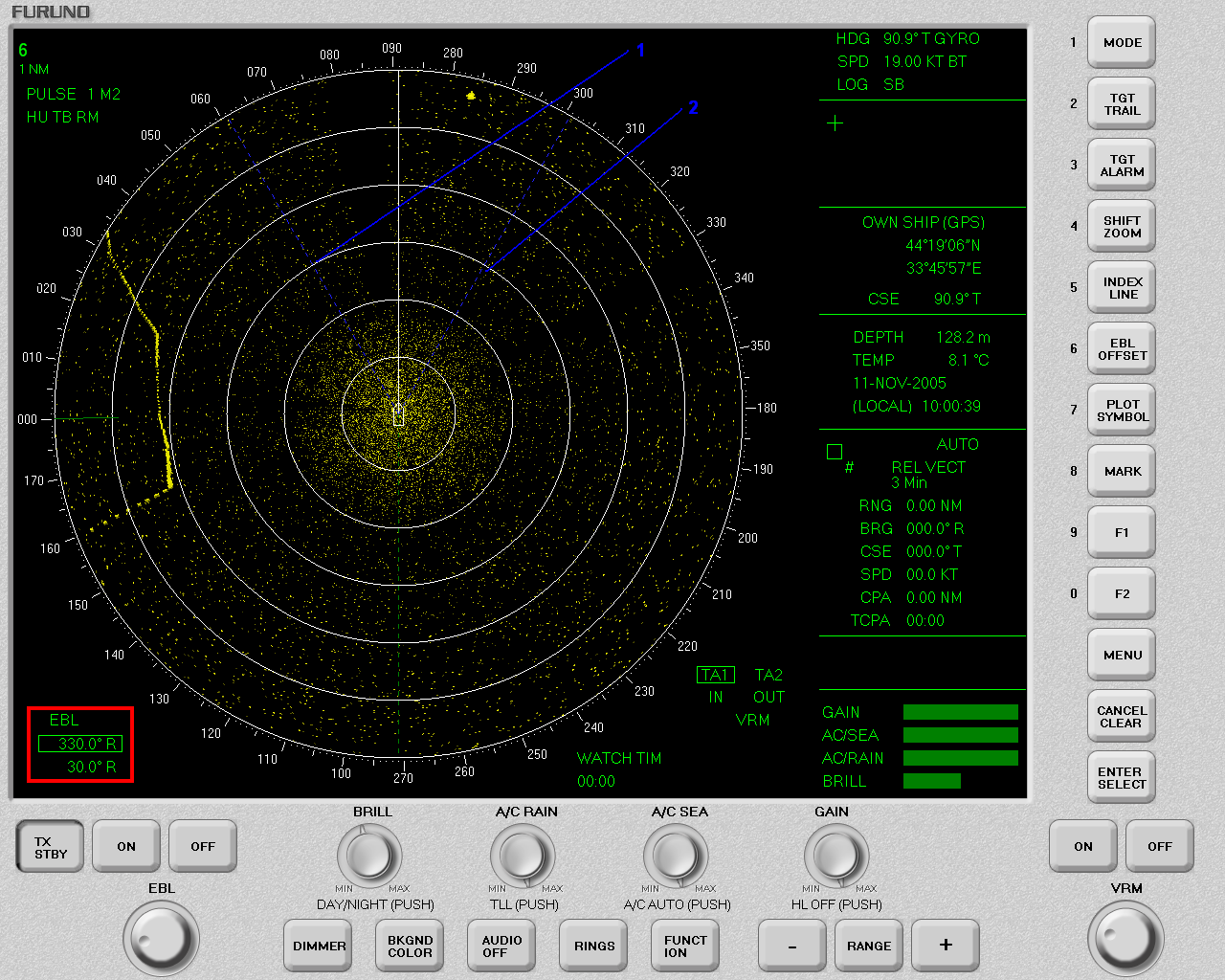
рис.2.4.85

рис.2.4.86
3.4 Для измерения направления (пеленга)
от собственного судна на объект визирем
«2», надо навести курсор трекбола на
кнопку
![]() ,
которая находится в нижней левой части
экрана, рис.2.4.84 обведена красным
прямоугольником, нажать ЛКТ. В месте
отображения информации “EBL”, рис.2.4.87, в зеленый прямоугольником
будет обведена нижнее значение, значение
измеренного пеленга визирем номер «2»,
для изменения направления визиря номер
«2» надо подвести курсор трекбола на
ручку “EBL”, рис.2.4.84,
обведена зеленным прямоугольником,
нажать ЛКТ и удерживая ЛКТ нажатой
вращать за часовой стрелкой, направление
визиря юудет изменяться по часовой
стрелке.
,
которая находится в нижней левой части
экрана, рис.2.4.84 обведена красным
прямоугольником, нажать ЛКТ. В месте
отображения информации “EBL”, рис.2.4.87, в зеленый прямоугольником
будет обведена нижнее значение, значение
измеренного пеленга визирем номер «2»,
для изменения направления визиря номер
«2» надо подвести курсор трекбола на
ручку “EBL”, рис.2.4.84,
обведена зеленным прямоугольником,
нажать ЛКТ и удерживая ЛКТ нажатой
вращать за часовой стрелкой, направление
визиря юудет изменяться по часовой
стрелке.

рис.2.4.87
Установка ориентации изображения:
– по диаметральной плоскости судна, азимутальной шкалы двигается в соответствии с курсом судна, стабилизировано изображение относительно грунта;
– ориентация изображения по курсу судна, стабилизация изображения относительно грунта;
– ориентация изображения стабилизированная по северу, режим стабилизации относительно грунта;
– ориентация изображения стабилизированная по северу, режим стабилизации относительно воды;
– по диаметральной плоскости судна, нулевая отметка азимутальной шкалы расположена вверху, стабилизировано изображение относительно грунта;
В окне ПО РЛС/САПР должна быть информация о выбранном режиме ориентации изображения.
4.1 Пример рассматривается с использованием ситуации “RLS1.tsk”, методика загрузки ситуации на исполнения в главе 2.7.
4.2 По умолчанию при начале работы ПО
РЛС/САРП тип Furuno(FR1500) изображение на ИКО ориентированно
по диаметральной плоскости судна,
азимутальной шкалы двигается в
соответствии с курсом судна, стабилизировано
изображение относительно грунта,
рис.2.4.88. Отметка севера (зеленного цвета
прямая линия) показывает направления
севера, рис.2.4.89. При стабилизации
относительно грунта центральная точка
ИКО, центр первого неподвижного кольца
дальности (место собственного судна),
на рис.2.4.88, обозначен знаком судна![]() ,
остается неподвижным относительно
отображенного на ИКО эхосигнала.
Информация о выбранном режиме ориентации
отображается в верхней левой части
монитора, рис.2.4.88, обведено красным
прямоугольником место отображение
информации о выбранном режиме ориентации,
информация “HUTBRM”, рис.2.4.90, соответствует
режиму ориентации диаметральной
плоскости судна, азимутальной шкалы
двигается в соответствии с курсом судна,
стабилизировано изображение относительно
грунта, о чем говорит сокращение “RM”,
рис.2.4.90.
,
остается неподвижным относительно
отображенного на ИКО эхосигнала.
Информация о выбранном режиме ориентации
отображается в верхней левой части
монитора, рис.2.4.88, обведено красным
прямоугольником место отображение
информации о выбранном режиме ориентации,
информация “HUTBRM”, рис.2.4.90, соответствует
режиму ориентации диаметральной
плоскости судна, азимутальной шкалы
двигается в соответствии с курсом судна,
стабилизировано изображение относительно
грунта, о чем говорит сокращение “RM”,
рис.2.4.90.
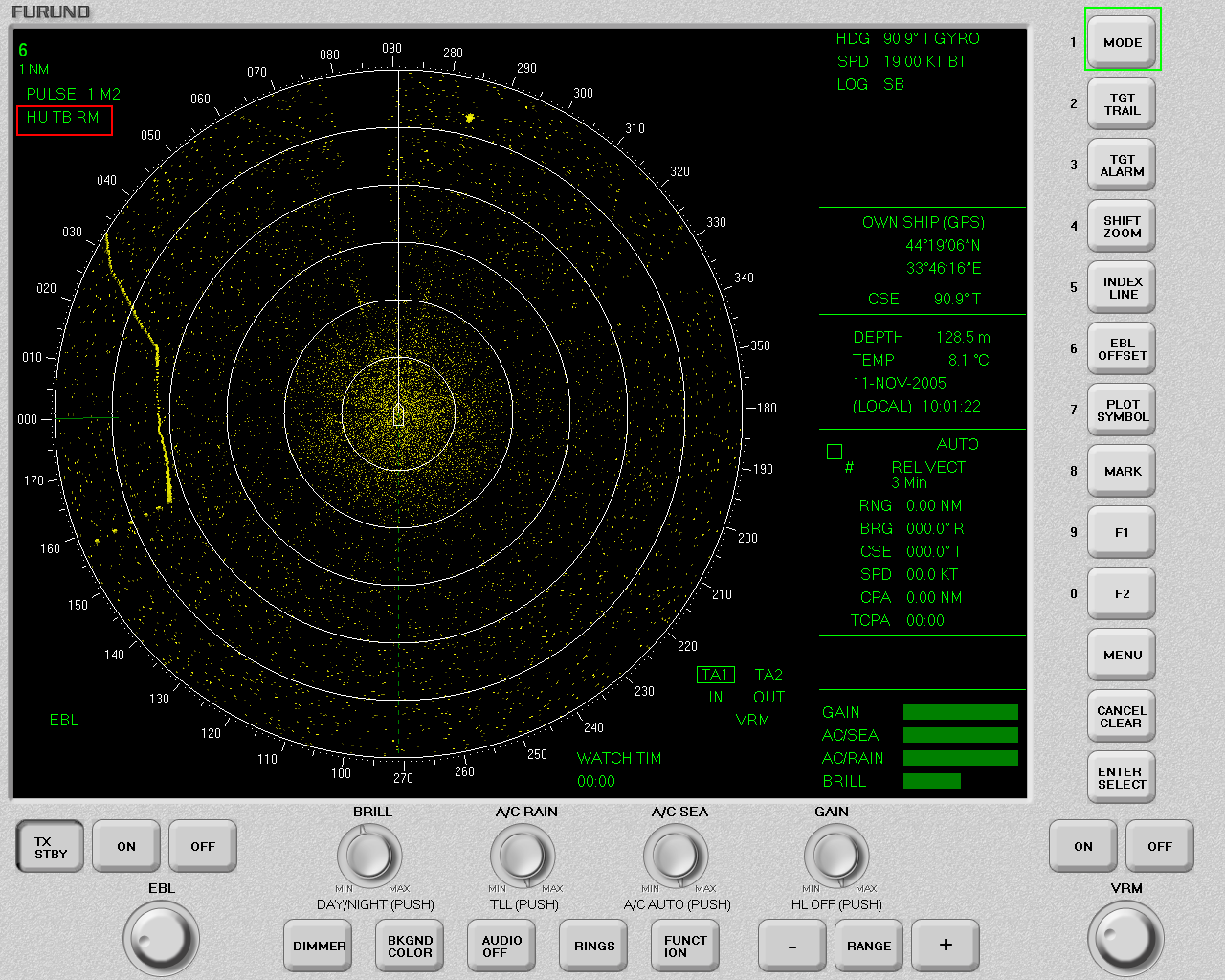
рис.2.4.88

рис.2.4.89
![]()
рис.2.4.90
4.3 Для смены ориентации изображения на
ИКО надо навести курсор трекбола на
кнопку
![]() — “Mode”, на рис.2.4.88,
обозначена зеленым прямоугольником,
нажать ЛКТ. Режим ориентации изображения
изменится на ориентация изображения
по курсу судна, стабилизация изображения
относительно грунта, рис.2.4.91. При режиме
ориентации изображения по курсу судна
изображение на
ИКО выравнивается так, чтобы линия курса
указывала на вершину ИКО (000 градусов
по азимутальной шкале, рис.2.4.91) отметка
курса указывает курс собственного
судна. Отметка курса обозначается
прямой линией белого цвета исходящейот центра ИКО, центр
первого неподвижного кольца дальности
(место собственного судна) обозначено
знаком судна
— “Mode”, на рис.2.4.88,
обозначена зеленым прямоугольником,
нажать ЛКТ. Режим ориентации изображения
изменится на ориентация изображения
по курсу судна, стабилизация изображения
относительно грунта, рис.2.4.91. При режиме
ориентации изображения по курсу судна
изображение на
ИКО выравнивается так, чтобы линия курса
указывала на вершину ИКО (000 градусов
по азимутальной шкале, рис.2.4.91) отметка
курса указывает курс собственного
судна. Отметка курса обозначается
прямой линией белого цвета исходящейот центра ИКО, центр
первого неподвижного кольца дальности
(место собственного судна) обозначено
знаком судна![]() , и доходящей до края
ИКО, рис.2.4.91.
, и доходящей до края
ИКО, рис.2.4.91.
При стабилизации относительно грунта
центральная точка ИКО, центре первого
неподвижного кольца дальности (место
собственного судна), на рис.2.4.91, обозначен
знаком судна
![]() ,
остается неподвижным относительно
отображенного на ИКО эхосигнала.
Информация о выбранном режиме ориентации
отображается в верхней левой части
монитора, рис.2.4.88, обведено красным
прямоугольником место отображение
информации о выбранном режиме ориентации,
информация “CURM”,
рис.2.4.92, соответствует режиму ориентации
по курсу судна, стабилизировано
изображение относительно грунта, о чем
говорит сокращение “RM”,
рис.2.4.92.
,
остается неподвижным относительно
отображенного на ИКО эхосигнала.
Информация о выбранном режиме ориентации
отображается в верхней левой части
монитора, рис.2.4.88, обведено красным
прямоугольником место отображение
информации о выбранном режиме ориентации,
информация “CURM”,
рис.2.4.92, соответствует режиму ориентации
по курсу судна, стабилизировано
изображение относительно грунта, о чем
говорит сокращение “RM”,
рис.2.4.92.

рис.2.4.91
![]()
рис.2.4.92
4.4 Для смены ориентации изображения стабилизированного по северу, режим стабилизации относительно грунта
на ИКО, надо навести курсор трекбола на
кнопку
![]() — “Mode”, на рис.2.4.88,
обозначена зеленым прямоугольником,
нажать ЛКТ. Режим ориентации изображения
изменится на ориентацию изображения
стабилизированного по северу, режим
стабилизации относительно грунта,
рис.2.4.93.
— “Mode”, на рис.2.4.88,
обозначена зеленым прямоугольником,
нажать ЛКТ. Режим ориентации изображения
изменится на ориентацию изображения
стабилизированного по северу, режим
стабилизации относительно грунта,
рис.2.4.93.

рис.2.4.93
При режиме ориентации изображения стабилизированного по северу изображение на ИКО выравнивается так, чтобы север всегда находился в вершине ИКО (отметка севера (зеленного цвета прямая линия) показывает направления севера, находится в вершине ИКО рис.2.4.94.) отметка курса указывает курс собственного судна и всегда направлена на значение шкалы ИКО 000 градусов, рис.2.4.95.
![]()
рис.2.4.94

рис.2.4.95
При стабилизации относительно грунта
центральная точка ИКО, центре первого
неподвижного кольца дальности (место
собственного судна), на рис.2.4.88, обозначен
знаком судна
![]() ,
остается неподвижным относительно
отображенного на ИКО эхосигнала.
Информация о выбранном режиме ориентации
отображается в верхней левой части
монитора, рис.2.4.88, обведено красным
прямоугольником место отображение
информации о выбранном режиме ориентации,
информация “NURM”,
рис.2.4.96, соответствует режиму ориентации
по северу судна, стабилизировано
изображение относительно грунта, о чем
говорит сокращение “RM”,
рис.2.4.96.
,
остается неподвижным относительно
отображенного на ИКО эхосигнала.
Информация о выбранном режиме ориентации
отображается в верхней левой части
монитора, рис.2.4.88, обведено красным
прямоугольником место отображение
информации о выбранном режиме ориентации,
информация “NURM”,
рис.2.4.96, соответствует режиму ориентации
по северу судна, стабилизировано
изображение относительно грунта, о чем
говорит сокращение “RM”,
рис.2.4.96.
![]()
рис.2.4.96
4.5 Для смены ориентации изображения стабилизированного по северу, режим стабилизации относительно воды
на ИКО, надо навести курсор трекбола на
кнопку
![]() — “Mode”, на рис.2.4.88,
обозначена зеленым прямоугольником,
нажать ЛКТ. Режим ориентации изображения
изменится на ориентацию изображения
стабилизированного по северу, режим
стабилизации относительно воды,
рис.2.4.97.
— “Mode”, на рис.2.4.88,
обозначена зеленым прямоугольником,
нажать ЛКТ. Режим ориентации изображения
изменится на ориентацию изображения
стабилизированного по северу, режим
стабилизации относительно воды,
рис.2.4.97.

рис.2.4.97
При режиме ориентации изображения стабилизированного по северу изображение на ИКО выравнивается так, чтобы север всегда находился в вершине ИКО (отметка севера (зеленного цвета прямая линия) показывает направления севера, находится в вершине ИКО рис.2.4.97.) отметка курса указывает курс собственного судна и всегда направлена на значение шкалы ИКО 000 градусов, рис.2.4.95.
В режим стабилизации относительно воды
собственное судно (центр первого
неподвижного кольца дальности, обозначено
знаком судна
![]() ,)
на рис.2.4.97 начинает перемещаться со
скоростью собственного судна, таким
образом место собственного судна на
ИКО относительно эхо сигнала — подвижно.
,)
на рис.2.4.97 начинает перемещаться со
скоростью собственного судна, таким
образом место собственного судна на
ИКО относительно эхо сигнала — подвижно.
Информация о выбранном режиме ориентации отображается в верхней левой части монитора, рис.2.4.98, обведено красным прямоугольником место отображение информации о выбранном режиме ориентации, информация “NUTM”, рис.2.4.98, соответствует режиму ориентации по северу судна, стабилизировано изображение относительно грунта, о чем говорит сокращение “RM”, рис.2.4.98.
![]()
рис.2.4.98
4.6 Для смены ориентации изображения
стабилизированного по диаметральной
плоскости судна, нулевая отметка
азимутальной шкалы расположена вверху,
стабилизировано изображение относительно
грунта на ИКО, надо навести курсор
трекбола на кнопку
![]() — “Mode”, на рис.2.4.88,
обозначена зеленым прямоугольником,
нажать ЛКТ. Режим ориентации изображения
изменится на ориентацию изображения
стабилизированного по северу, режим
стабилизации относительно воды,
рис.2.4.99.
— “Mode”, на рис.2.4.88,
обозначена зеленым прямоугольником,
нажать ЛКТ. Режим ориентации изображения
изменится на ориентацию изображения
стабилизированного по северу, режим
стабилизации относительно воды,
рис.2.4.99.

рис.2.4.99
Изображение на ИКО ориентированно по диаметральной плоскости судна, нулевая отметка азимутальной шкалы расположена вверху и остается не подвижной, стабилизировано изображение относительно грунта, рис.2.4.99. Отметка севера (зеленного цвета прямая линия) показывает направления севера, рис.2.4.100.
![]()
рис.2.4.100
При стабилизации относительно грунта
центральная точка ИКО, центр первого
неподвижного кольца дальности (место
собственного судна), на рис.2.4.88, обозначен
знаком судна
![]() ,
остается неподвижным относительно
отображенного на ИКО эхосигнала.
Информация о выбранном режиме ориентации
отображается в верхней левой части
монитора, рис.2.4.88, обведено красным
прямоугольником место отображение
информации о выбранном режиме ориентации,
информация “HURM”,
рис.2.4.101, соответствует режиму ориентации
диаметральной плоскости судна, отметка
азимутальной шкалы расположена вверху
и остается не подвижной, стабилизировано
изображение относительно грунта, о чем
говорит сокращение “RM”,
рис.2.4.101.
,
остается неподвижным относительно
отображенного на ИКО эхосигнала.
Информация о выбранном режиме ориентации
отображается в верхней левой части
монитора, рис.2.4.88, обведено красным
прямоугольником место отображение
информации о выбранном режиме ориентации,
информация “HURM”,
рис.2.4.101, соответствует режиму ориентации
диаметральной плоскости судна, отметка
азимутальной шкалы расположена вверху
и остается не подвижной, стабилизировано
изображение относительно грунта, о чем
говорит сокращение “RM”,
рис.2.4.101.
![]()
рис.2.4.101
Регулирование интенсивности помех от моря, от дождя, регулирование интенсивности хаотических импульсных помех.
5.1 Пример рассматривается с использованием ситуации “RLS2_1.tsk”, методика загрузки ситуации на исполнения в главе 2.7.
.
5.2 На мониторе ФТ РЛС/САРП в ИКО отображается дождевая зона, рис.2.4.102, обведена красным прямоугольником, дождевая зона — «пятно» на ИКО отображенное пикселями разных оттенков желтого цвета. Также в ИКО отображаются хаотические импульсные помехи, точки(пиксели) разного оттенка желтого цвета, помехи отчетливо видны в центре ИКО так как имитируется «засветка» от собственного радара, которая дает хаотические импульсные помех рис.2.4.103. Помехи от моря представляют собой хаотически отображенные точки(пиксели) разного оттенка желтого цвета, рис.2.4.104.

рис.2.4.102

рис.2.4.103

рис.2.4.104
5.3. Для регулирования интенсивности помех дождевой зоны (интенсивность помех дождевой зоны — количество пикселей ярко желтого цвета, на площади дождевой зоны), надо навести курсор трекбола на ручку регулировки помех от дождя “A/CRAIN”, рис.2.4.102, обведено зеленым прямоугольником и нажать ПКТ. Удерживая ПКТ перемещать курсор трекбола против часовой стрелки, имитируя вращение ручки до значения “min”, рис.2.4.105. При значении интенсивности помех дождевой зоны “min”, дождевая зона рис.2.4.106, обведена красным прямоугольником, будет отличатся в меньшую сторону по интенсивности от интенсивности дождевой зоны на рис.2.4.102, дождевая зона обведена красным прямоугольником.

рис.2.4.105

рис.2.4.106
5.4 Для регулирования интенсивности хаотических импульсных помех (интенсивность хаотических импульсных помех — количество пикселей ярко желтого цвета, в центре ИКО), надо навести курсор трекбола на ручку регулировки хаотических импульсных помех “GAIN”, рис.2.4.102, обведено синим прямоугольником и нажать ПКТ. Удерживая ПКТ перемещать курсор трекбола против часовой стрелки, имитируя вращение ручки до значения “min”, рис, 2.4.107. При значении интенсивности хаотических импульсных помех “min”, хаотические импульсные помехи рис.2.4.108, будет отличатся в меньшую сторону по интенсивности от интенсивности хаотических импульсных помех на рис.2.4.103.

рис.2.4.107

рис.2.4.108
5.5 Для регулирования интенсивности помех от моря (интенсивность помех от моря — количество пикселей ярко желтого цвета, на площади ИКО), надо навести курсор трекбола на ручку регулировки хаотических импульсных помех “A/CSEA”, рис.2.4.102, обведено коричневым прямоугольником и нажать ПКТ. Удерживая ПКТ перемещать курсор трекбола против часовой стрелки, имитируя вращение ручки до значения “min”, рис.2.4.109. При значении интенсивности помех от моря “min”, помех от моря рис.2.4.110, будет отличатся в меньшую сторону по интенсивности от интенсивности помех от моря на рис.2.4.109.

рис.2.4.109

рис.2.4.110
В ФТ РЛС/САПР должна быть возможность отображения информации собственного судна в следующем объеме гироскопический курс, относительная скорость.
6.1 Пример рассматривается с использованием ситуации “RLS1.tsk”, методика загрузки ситуации на исполнения в главе 2.7.
6.2 В правой верхней части экрана ФТ РЛС/САРП располагается информация о гироскопическом курсе собственного судна, рис.2.4.111, обведено красным прямоугольником, и информация о скорости собственного судна, рис.2.4.111, обведено синим прямоугольником. В окне индикации гироскопического курса собственного судна, значения курса отображается после буквенного обозначения “HDG”, рис.2.4.112, обведено значение курса красным прямоугольником, значение курса в градусах. В окне индикации скорости собственного судна, значения скорости отображается после буквенного обозначения “SPD”, рис.2.4.113, обведено значение скорости синим прямоугольником, значение скорости в узлах.

рис.2.4.111
![]()
рис.2.4.112
![]()
рис.2.4.113
Ручной захват целей на сопровождение.
7. Пример рассматривается с использованием ситуации “RLS3_1.tsk”, методика загрузки ситуации на исполнения в главе 2.7.
7.2 Для ручного захвата цели на сопровождение надо курсор трекбола на экране ФТ РЛС/САРП в ИКО навести на эхосигнал цели рис.2.4.114, цель обведена красным прямоугольником (цель — скопление желтых точек(пикселей) на бесконечно малом по площади участке ИКО) и нажать ЛКТ. Цель взялась на автосопровождение, рис.2.4.115 при захвате на автосопровождения цели над целью появляется графическая индикация в форме зеленного кружка, рис.2.4.116, и порядкового номер (цифровая индикация) располагается возле графического кружка индикации взятия цели на автосопровождение.

рис.2.4.114

рис.2.4.115
![]()
рис.2.4.116
7.3 Для снятие цели с сопровождения надо
навести курсор трекбола на взятую на
автосопровождения цель номер 1,
рис.2.4.115, нажать ПКТ. Далее надо подвести
курсор трекбола на кнопку
![]() ,
которая находится в правой части экрана,
рис.2.4.117, обведена красным прямоугольником,
и нажать ЛКТ. Цель снята с сопровождения,
графическая индикация захвата цели на
сопровождения над целью отсутствует,
что означает цель не на автосопровождении,
рис.2.4.118.
,
которая находится в правой части экрана,
рис.2.4.117, обведена красным прямоугольником,
и нажать ЛКТ. Цель снята с сопровождения,
графическая индикация захвата цели на
сопровождения над целью отсутствует,
что означает цель не на автосопровождении,
рис.2.4.118.

рис.2.4.117

рис.2.4.118
Информация о цели взятой на автосопровождение.
8.1 Выполнить действия описанные в пунктах 7.1, 7.2 этого раздела.
8.2 Засечь одну минуты. По пришествию трех минуть выработается вектор движения судна, рис.2.4.119. Длина вектора — скорость судна взятого на сопровождения, направление вектора соответствует курсу судна, вектор представляет собой прямую линию зеленного цвета выходящую с кружка(графической индикации взятия цели на сопровождение), рис.2.4.120.

рис.2.4.119
![]()
рис.2.4.120
8.3 Длина отображаемого вектора (время
экстраполирования информации) регулируется
в меню в опции регулирования значения
вектора цели. Для того чтоб отрегулировать
длину вектора надо навести курсор
трекбола на кнопку
![]() ,
которая находится в правой части экрана,
рис.2.4.119, обведено красным прямоугольником,
нажать ЛКТ. На экране появится меню
состоящие из опций, рис.2.4.121, меню обведено
красным прямоугольником.
,
которая находится в правой части экрана,
рис.2.4.119, обведено красным прямоугольником,
нажать ЛКТ. На экране появится меню
состоящие из опций, рис.2.4.121, меню обведено
красным прямоугольником.
8.4 Навести курсор трекбола на опцию “PLOT”, которая находится в меню, рис.2.4.122, обведена красным прямоугольником, нажать ЛКТ.
8.5 На экране, на месте меню появится “PLOTMENU1”, рис.2.4.123, обведено красным прямоугольником.

рис.2.4.121

рис.2.4.122

рис.2.4.123
8.6 В опции “VECTTIME” регулируется время длины вектора цели, опция обведена красным прямоугольником, рис.2.4.124. В строке напротив название опции “VECTTIME” указано возможное значение длины вектора цели.

рис.2.4.124
8.7 По умолчанию длина вектора цели равна трем минутам, значение “3” выделено зеленым прямоугольником, рис.2.4.124.
8.8 Для изменения длины вектора надо подвести курсор трекбола на опцию “VECTTIME” и нажать ЛКТ. При каждом нажатии ЛКТ значение времени вектора будет изменяться на следующие в строке, после3минут, 6 минут, после 6 минут, 12 минут, после 30 минут , значение времени будет равно 30 секундам, изменение значения закольцовано по кругу. Таким образом если мы хотим изменить значения времени длины вектора надо с 3 минут на 15 минут, мы должны нажать ЛКТ над опцией “VECTTIME”, 3 раза. Значение времени длины вектора соответствует 15 минутам, значение 15 минут обведено зеленым прямоугольником, рис.2.4.125.

рис.2.4.125
8.9 Для того чтоб выбранное время длины
вектора вступило в силу надо навести
курсор трекбола на кнопку
 ,
находится в правой части экрана,
рис.2.4.126 обведена красным прямоугольником.
Нажать ЛКТ.
,
находится в правой части экрана,
рис.2.4.126 обведена красным прямоугольником.
Нажать ЛКТ.

рис.2.4.126
8.10 Длина вектора цели номер “1” увеличится и будет соответствовать времени экстраполяции информации 15 минутам, рис.2.4.127.

рис.2.4.127
8.11 Информация о значении времени и режиме отображения вектора цели отображается с правой стороны от ИКО, рис.2.4.127, место где отображается вышесказанная информация, обведено красным прямоугольником. Обозначение “RELVECT” говорит, что вектор отображается в относительном режиме, “15Min” показывают, что время длины вектора 15 минут, рис.2.4.128.
![]()
рис.2.4.128
8.12 Для изменения режима отображения вектора надо повторить действия описанные в пунктах 8.3 — 8.5. В опции “VECTREF” меню “PLOTMENU1”, опция обведена красным прямоугольником рис.2.4.129, задается режим отображения вектора. В данном случае он задан как относительный, значение “REL”, обведено зеленым прямоугольником, что означает вектор отображается в относительном режиме. Для того чтоб его переключить в истинный режим, надо навести курсор трекбола на опцию “VECTREF”, и нажать ЛКТ. Выбран режим отображения вектора истинный значение “TRUE” обведено зеленым прямоугольником, рис.2.4.130. При следующем нажатии ЛКТ на опцию “VECTREF” режим отображения вектора вновь станет относительным. Но в данном случае мы его переключили на истинный. Для того чтоб изменения вступили в силу надо выполнить действия описанные в пункте 8.9. На ИКО у цели номер “1” вектор будет иметь длину 15 минут, и режим отображения вектора истинным, рис.2.4.131. О чем будет свидетельствовать информация о значении времени и режима отображения вектора цели, рис.2.4.132.

рис.2.4.129

рис.2.4.130

рис.2.4.131
![]()
рис.2.4.132
8.13 Чтоб просмотреть информацию по цели взятой на автосопровождение надо навести курсор трекбола на цель взятую на автосопровождение и нажать ЛКТ. Цель очертится синим квадратиком, рис.2.4.133, что означает информация о целе выведена на экран, окно с информацией о целе располагается в правой части от ИКО, рис.2.4.134 обведено красным прямоугольником.
![]()
рис.2.4.133

рис.2.4.134
8.14 В окне информации о цели рис.2.4.135, присутствует такая информация как пеленг цели в градусах, в строке “BRG”, дальность цели в милях, в строке “RNG”, курс цели в градусах, в строке “CSE”, скорость цели в узлах, в строке “SPD”

рис.2.4.135