

2.4 Функциональный тренажер рлс/сарп
Руководство по эксплуатации функционального тренажера (ФТ) РЛС/САРП состоит из отдельных пунктов с описанием функциональных возможностей тренажера и четким руководством какие операции должен сделать оператор чтоб получить желаемую функцию. Все примеры упражнений на которые в данной главе проводиться ссылка, поставляются в комплекте с мультифункциональным навигационным тренажером “Литер Navy”.
2.4.1 Программное обеспечение рлс/сарп Nucleus
1. Графический индикатор кругового обзора (ико). Переключение шкал дальности. Неподвижные кольца дальности на ико.
1.1 Пример рассматривается с использованием ситуации “RLS1.tsk”.
1.2 На ФТ РЛС/САРП на экране монитора появится графическое отображение ПО РЛС/САРП типа KelvinHughes(Nucleus6000), рис.2.4.1.

рис.2.4.1
На рис.2.4.2, ИКО находится по центру, имеет круглую форму и синий фон. Красным прямоугольником обведено окно с индикацией значения выбранного режима шкалы дальности.

рис.2.4.2
По умолчанию при начале работы ПО РЛС/САРП шкала дальности установлена на 6 миль, значение шкалы дальности с отображается с правой стороны от слова “Range” в окне индикации значения шкалы дальности, рис.2.4.3. Индикация количества неподвижных колец дальности на ИКО отображается с права от слова “Rings”, рис.2.4.3. при значении 6 миль шкалы дальности на ИКО присутствует 6 неподвижных колец дальности. На рис.2.4.2 к каждому неподвижному кольцу дальности проведена зеленная прямая линия.

рис.2.4.3
Для того чтоб переключить шкалу дальности в режим 12 миль надо подвести курсор трекбола на окно индикации значения шкалы дальности и нажать левую кнопку трекбола (ЛКТ). Экран ИКО перерисует эхосигнал в соответствии с масштабом выбранной новой шкала дальности. Значение новой шкалы дальности 12 миль будет отображено в окне индикации значения шкалы дальности рис.2.4.4, этому режиму шкалы дальности соответствует 6 неподвижных колец дальности рис.2.4.4.

рис.2.4.4
Для переключения шкалы дальности в режимы 24, 48, 96 миль, необходимо повторять последовательно действия описанные в пункте 1.5. Значения режимов будет отображаться в окне индикации значения шкалы дальности. Каждому режиму шкалы дальности 24, 48, 96 миль соответствует значения числа неподвижных колец дальности отображаемых на ИКО, значения числа отображается в окне индикации значения шкалы дальности.
Для того чтоб выбрать значение шкалы дальности 3, 1.5, 0.75, 0.5, 0.25 миль, надо подвести курсор трекбола на окно индикации значения шкалы дальности и нажать правую кнопку трекбола (ПКТ), надо нажимать кнопку трекбола пока на в окне индикации значения шкалы дальности не отобразится нужное значение. Каждому режиму шкалы дальности 3, 1.5, 0.75, 0.5, 0.25 миль соответствует соответственно 6, 6, 3, 5, 5 количество неподвижных колец дальности отображаемых на ИКО.
Измерения дальности при помощи двух подвижных колец дальности.
2.1 Пример рассматривается с использованием ситуации “RLS1.tsk”, методика загрузки ситуации на исполнения в главе 2.7.
2.2 В ПО РЛС/САРП подвести курсор трекбола на окно подвижных колец дальности “VRM”, которое находится в левой нижней части экрана, рис.2.4.5, обведено красным прямоугольником. Когда курсор трекбола находится над окном “VRM” нажать ЛКТ.

рис.2.4.5
2.3 На ИКО появится подвижное кольцо дальности номер «1», оно отображается в виде круга зеленой пунктирной линии, рис.2.4.6, обозначен цифрой «1». Перемещая курсор трекбола по площади ИКО подвижное кольцо дальности изменяет свой радиус, таким образом край кольца можно подвести к любому месту внутри ИКО и дальность от центра до края кольца будет отображаться в окне “VRM”, верхняя строка цифры зеленного цвета, рис.2.4.7. Дальность измеряется в милях.

рис.2.4.6

рис.2.4.7
2.4 Для измерения дальности подвижным кольцом дальности номер «2», надо навести курсор трекбола на окно подвижных колец дальности “VRM” которое находится в левой нижней части экрана, рис.2.4.5, обведено красным прямоугольником, нажать правую кнопку трекбола (ПКТ). На ИКО появится подвижное кольцо дальности номер «2», оно отображается в виде круга красной пунктирной линии, рис.6, обозначен цифрой «2». Перемещая курсор трекбола по площади ИКО подвижное кольцо дальности изменяет свой радиус, таким образом край кольца можно подвести к любому месту внутри ИКО и дальность от центра до края кольца будет отображаться в окне “VRM”, нижняя строка цифры красного цвета, рис.2.4.7. Дальность измеряется в милях.
Отключения отображения на ИКО неподвижных колец дальности.
3.1 Пример рассматривается с использованием ситуации “RLS1.tsk”, методика загрузки ситуации на исполнения в главе 2.7.
3.2 В ПО РЛС/САРП на ИКО отображается неподвижные кольца дальности. На рис.2.4.8 к каждому неподвижному кольцу дальности проведена зеленная прямая линия.
3.3 Для того чтоб отключить отображение на ИКО неподвижных колец дальности надо подвести курсор трекбола на окно отключения неподвижных колец дальности “HLOFF”, нажать ЛКТ и удерживать на ИКО пропадет изображение неподвижных колец дальности, рис.2.4.9, по удерживается ЛКТ.

рис.2.4.8

рис.2.4.9
Измерение направления (пеленга) от собственного судна на любой объект.
4.1 Пример рассматривается с использованием ситуации “RLS1.tsk”, методика загрузки ситуации на исполнения в главе 2.7
4.2 В окне программы РЛС/СРАП подвести курсор трекбола на окно подвижного визиря измерения пеленга “EBL”, которое находится в левой нижней части экрана ПО , рис.2.4.10, обведено красным прямоугольником. Когда курсор трекбола находится над окном “EBL“ нажать ЛКТ.
4.3 На ИКО появится подвижный визирь измерения пеленга, он отображается в виде прямой зеленой пунктирной линии от центра ИКО до его края, рис.2.4.10, обозначен цифрой «1». Перемещая курсор трекбола по площади ИКО визирь измерения пеленга изменяет угол относительно направления движения судна, таким образом угол который образуется между направлением движения судна и линией подвижного визиря измерения пеленга является направлением (пеленгом) от собственного судна до объекта через который проходи линия визиря. Значения измеренного направления (пеленга) в цифровом виде отображаться в окне “EBL”, верхняя строка цифры зеленного цвета, рис.2.4.11. Пеленг измеряется в градусах.

рис.2.4.10

рис.2.4.11
Стабилизация изображения относительно воды и относительно грунта (истинный режим). В окне ПО РЛС/САПР должна быть информация о выбранном режиме стабилизации.
5.1 Пример рассматривается с использованием ситуации “RLS1.tsk”, методика загрузки ситуации на исполнения в главе 2.7
5.2 По умолчанию, при запуске ПО РЛС/САРП режим стабилизации изображения истинный, стабилизация изображения на ИКО выполняется относительно грунта. Значение режима отображается в окне переключения режима стабилизации, которое находится в правой верхней части экрана, окно обведено красным прямоугольником, рис.2.4.12. В окне переключения режима стабилизации надпись – “RM(T)”, рис.2.4.13, что означает режим стабилизации относительно грунта. При стабилизации относительно грунта центральная точка ИКО, центр первого неподвижного кольца дальности (место собственного судна), на рис.2.4.12, обозначен зеленой точкой, остается неподвижным относительно отображенного на ИКО эхосигнала.

рис.2.4.12
![]()
рис.2.4.13
5.3 Для задания режима стабилизации относительно воды, надо навести курсор трекбола на окно переключения режима стабилизации, окно обведено красным прямоугольником, рис.2.4.12, и нажать ЛКТ. В окне переключения режима стабилизации надпись “TM(T)”, рис.2.4.14, что означает, что включен режим стабилизации относительно воды. В режим стабилизации относительно воды собственное судно (центр первого неподвижного кольца дальности) на рис.2.4.15 обозначен зеленной точкой начинает перемещаться со скоростью собственного судна.
![]()
рис.2.4.14

рис.2.4.15
5.4 Для переключения в режим стабилизации относительно грунта, который при включении стоит по умолчанию, надо повторить действия описанные в пункте 5.3. Как результат в окне переключения режима стабилизации будет отображена информация “RM(T)”, рис.2.4.13, – режим стабилизации относительно грунта.
Установка ориентации изображения по диаметральной плоскости судна, ориентации изображения стабилизированная по северу, ориентации изображения по курсу судна.
6.1 Пример рассматривается с использованием ситуации “RLS1.tsk”, методика загрузки ситуации на исполнения в главе 2.7
6.2 Для выбора режима ориентации изображения по диаметральной плоскости надо подвести курсор трекбола на окно переключения режимов ориентации изображения рис.2.4.16, окно выделено красным прямоугольником, и располагается в правой верхней части экрана ПО РЛС/САРП, нажать ПКТ. Ориентация изображения на ИКО будет в режиме ориентации по диаметральной плоскости судна. Информация о выбранном режиме ориентации изображения находится в окне переключения режимов ориентации изображения, рис.2.4.16, окно выделено красным прямоугольником, и располагается в правой верхней части экрана. Режим ориентации изображения по диаметральной плоскости судна обозначается как “HeadUP”, рис.2.4.17. При режиме ориентации изображения по диаметральной плоскости судна нулевая отметка азимутальной шкалы расположена вверху(на рис.2.4.16 обведена зеленім прямоугольником)и соответствует направлению носовой части судна, отметка курса также направлена вверх. Отметка курса обозначается прямой линией зеленного цвета исходящей от центра ИКО, центр первого неподвижного кольца дальности (место собственного судна) и доходящей до края ИКО, рис.2.4.16.

рис.2.4.16.

рис.2.4.17.
6.3 Для выбора режима ориентации изображения стабилизированного по северу надо подвести курсор трекбола на окно переключения режимов ориентации изображения рис.2.4.18, окно выделено красным прямоугольником, и располагается в правой верхней части экрана ПО РЛС/САРП, нажать ЛКТ. Ориентация изображения на ИКО будет в режиме ориентации изображения стабилизированного по северу. Информация о выбранном режиме ориентации изображения находится в окне переключения режимов ориентации изображения, рис.2.4.18, окно выделено красным прямоугольником, и располагается в правой верхней части экрана. Режим ориентации изображения стабилизированного по северу обозначается как “NorthUp”, рис.2.4.19. При режиме ориентации изображения стабилизированного по северу изображение на ИКО выравнивается так, чтобы север всегда находился в вершине ИКО (000 градусов по азимутальной шкале, рис.2.4.18, обведено зеленым прямоугольником) отметка курса указывает курс собственного судна. Отметка курса обозначается прямой линией зеленного цвета исходящей от центра ИКО, центр первого неподвижного кольца дальности (место собственного судна) и доходящей до края ИКО, рис.2.4.18.

рис.2.4.18

рис.2.4.19.
6.4 Для выбора режима ориентации изображения стабилизированного по курсу судна надо подвести курсор трекбола на окно переключения режимов ориентации изображения рис.2.4.20, окно выделено красным прямоугольником, и располагается в правой верхней части экрана ПО РЛС/САРП, нажать центральную кнопку трекбола ЦКТ. Ориентация изображения на ИКО будет в режиме ориентации изображения стабилизированного по курсу судна. Информация о выбранном режиме ориентации изображения находится в окне переключения режимов ориентации изображения, рис.2.4.20, окно выделено красным прямоугольником, и располагается в правой верхней части экрана. Режим ориентации изображения по стабилизированного по курсу судна обозначается как “CourseUp”, рис.2.4.21. При режиме ориентации изображения стабилизированного по курсу судна изображение на ИКО выравнивается так, чтобы линия курса указывала на вершину ИКО (000 градусов по азимутальной шкале, рис.2.4.20, обведено зеленым прямоугольником) отметка курса указывает курс собственного судна. Отметка курса обозначается прямой линией зеленного цвета исходящей от центра ИКО, центр первого неподвижного кольца дальности (место собственного судна) и доходящей до края ИКО, рис.2.4.20.

рис.2.4.20.

рис.2.4.21.
Регулирования интенсивности помех от моря, от дождя, регулирование интенсивности хаотических импульсных помех.
7.1 Пример рассматривается с использованием ситуации “RLS2.tsk”, методика загрузки ситуации на исполнения в главе 2.7
7.2 На мониторе ПО РЛС/САРП в ИКО отображается дождевая зона, рис.2.4.22, обведена красным прямоугольником, дождевая зона — «пятно» на ИКО отображенное пикселями разных оттенков желтого цвета. Также в ИКО отображаются хаотические импульсные помехи, точки(пиксели) разного оттенка желтого цвета, помехи отчетливо видны в центре ИКО так как имитируется «засветка» от собственного радара, которая дает хаотические импульсные помех рис.2.4.23. Помехи от моря представляют собой хаотически отображенные точки(пиксели) разного оттенка желтого цвета, рис.2.4.24.

рис.2.4.22.

рис.2.4.23.

рис.2.4.24.
7.3. Для регулирования интенсивности помех дождевой зоны (интенсивность помех дождевой зоны — количество пикселей ярко желтого цвета, на площади дождевой зоны), надо навести курсор трекбола на окно регулировки помех, рис.2.4.22, обведено зеленым прямоугольником и нажать ПКТ. Нажимать ПКТ до значения интенсивности помех дождевой зоны 9, значения интенсивности дождевой зоны отображается в окне регулировки помех, рис, 2.4.25, значение обведено красным прямоугольником. При значении интенсивности помех дождевой зоны 9, дождевая зона рис.2.4.26, обведена красным прямоуголником, будет отличатся в большую сторону по интенсивности от интенсивности дождевой зоны на рис.2.4.22, дождевая зона обведена красным прямоугольником.

рис.2.4.25.

рис.2.4.26.
7.4 Для регулирования интенсивности хаотических импульсных помех (интенсивность хаотических импульсных помех — количество пикселей ярко желтого цвета, в центре ИКО), надо навести курсор трекбола на окно регулировки помех, рис.2.4.22, обведено зеленым прямоугольником и нажать ЛКТ. Нажимать ЛКТ до значения интенсивности хаотических импульсных помех 0, значения интенсивности дождевой зоны отображается в окне регулировки помех, рис, 2.4.27, значение обведено красным прямоугольником. При значении интенсивности хаотических импульсных помех 0, хаотические импульсные помехи рис.2.4.28, будет отличатся в меньшую сторону по интенсивности от интенсивности хаотических импульсных помех на рис.2.4.23.

рис.2.4.27.

рис.2.4.28.
7.5 Для регулирования интенсивности помех от моря (интенсивность помех от моря — количество пикселей ярко желтого цвета, на площади ИКО), надо навести курсор трекбола на окно регулировки помех, рис.2.4.22, обведено зеленым прямоугольником и нажать ЦКТ. Нажимать ЦКТ до значения интенсивности помех от моря 9, значения интенсивности помех от моря отображается в окне регулировки помех, рис,2.4.29, значение обведено красным прямоугольником. При значении интенсивности помех от моря 0, помехи от моря рис.2.4.30, будет отличатся в большую сторону по интенсивности от интенсивности помех от моря на рис.2.4.24.

рис.2.4.29.

рис.2.4.30.
Информация о курсе, скорости собственного судна.
8.1 Пример рассматривается с использованием ситуации “RLS1.tsk”, методика загрузки ситуации на исполнения в главе 2.7
8.2 В правой верхней части экрана ПО РЛС/САРП располагается окно индикации гироскопического курса собственного судна, рис.2.4.31, обведено красным прямоугольником, и окно индикации скорости собственного судна, рис.2.4.31, обведено зеленым прямоугольником. В окне индикации гироскопического курса собственного судна, значения курса отображается после буквенного обозначения “HDG”, рис.2.4.32, обведено значение курса красным прямоугольником, значение курса в градусах. В окне индикации скорости собственного судна, значения скорости отображается после буквенного обозначения “L”, рис.2.4.33, обведено значение курса зеленым прямоугольником, значение скорости в узлах.

рис.2.4.31.
![]()
рис.2.4.32.
![]()
рис.2.4.33.
Ручной захвата целей на сопровождение.
9.1 Пример рассматривается с использованием ситуации “RLS3.tsk”, методика загрузки ситуации на исполнения в главе 2.7
9.2 Для ручного захвата цели на сопровождение надо курсор трекбола на экране ПО РЛС/САРП в ИКО навести на эхосигнал цели рис.2.4.34, цель обведена красным прямоугольником (цель — скопление желтых точек(пикселей) на бесконечно малом по площади участке ИКО) и нажать ЛКТ. Цель взялась на автосопровождение, рис.2.4.35 при захвате на автосопровождения цели над целью появляется графическая индикация в форме зеленного кружка, рис.2.4.36, и порядкового номер (цифровая индикация) располагается возле графического кружка индикации взятия цели на автосопровождение.

рис.2.4.34.

рис.2.4.35.
![]()
рис.2.4.36.
9.3 Для снятие цели с сопровождения надо навести курсор трекбола на взятую на автосопровождения цель номер 1, рис.2.4.35, нажать ПКТ. С правой части экрана от ИКО появится сообщения о подтверждении действий на удаления, сообщение написано белыми буквами на красном фоне, рис.2.4.37.. Вид окна с сообщением рис.2.4.38.
9.4 Навести курсор трекбола на окно с сообщением на подтверждении действий на удаления нажать ЛКТ. Цель снята с сопровождения, графическая индикация захвата цели на сопровождения над целью отсутствует, что означает цель не на автосопровождении, рис.2.4.39.

рис.2.4.37.

рис.2.4.38.

рис.2.4.39
Графическая и текстовая информация о целее взятой на сопровождение.
10.1 Выполнить действия описанные в пунктах 9.1, 9.2.
10.2 Засечь три минуты. По пришествию трех минуть выработается вектор движения судна, рис.2.4.40. Длина вектора — скорость судна взятого на сопровождения, направление вектора соответствует курсу судна, вектор представляет собой прямую линию зеленного цвета выходящую с кружка(графической индикации взятия цели на сопровождение), рис.2.4.41.

рис.2.4.40
![]()
рис.2.4.41
10.3 Длину отображаемого вектора (время экстраполирования информации) регулируется в окне регулирования значения вектора цели, рис.2.4.40, обведено окно красным прямоугольником. Для регулирования длины вектора надо на окно регулирования значения вектора цели навести курсор трекбола и нажимать ЦКТ до тех пор пока значение длины вектора не будет равно 30 секундам. Значение вектора отображается цифрой в окне регулирования значения вектора цели, рис.2.4.42, значение обведено красным прямоугольником.
![]()
рис.2.4.42
10.4 Продолжая удерживать курсор трекбола над окном регулирования значения вектора цели, нажать ПКТ. Значение длины вектора цели станет 1 минута, рис.2.4.43.
![]()
рис.2.4.43
10.5 Удерживая курсор трекбола над окном регулирования значения вектора цели, нажимать ПКТ, значение длины вектора будут равны таким значениям 2, 3, 6, 12, 15, 20, 25, 30 минут. На рис.2.4.44, вектор длиной в 30 минут.

рис.2.4.44
10.6 По умолчанию вектор движения цели отображается в относительно режиме, для изменения режима отображения вектора в истинный режим отображения надо навести курсор трекбола на окном регулирования значения вектора цели, рис.2.4.40 обведено красным прямоугольником, нажать ЛКТ. Вектор будет отображаться в истинном режиме, рис.2.4.45. Для выбора режима относительно отображения вектора цели надо удерживая курсор трекбола над окном регулирования значения вектора цели, рис.2.4.40 обведено красным прямоугольником, нажать ЛКТ. Вектор будет отображаться в относительном режиме, рис.2.4.46.

рис.2.4.45

рис.2.4.46
10.7 Чтоб просмотреть информацию по цели взятой на автосопровождение надо навести курсор трекбола на цель взятую на автосопровождение и нажать ЛКТ. Цель очертится синим квадратиком, рис.2.4.47, что означает информация о целе выведена на экран, окно с информацией о целе располагается в правой части от ИКО, рис.2.4.48 обведено красным прямоугольником.

рис.2.4.47

рис.2.4.48
10.8 В окне информации о цели рис.2.4.49, присутствует такая информация как пеленг цели в градусах, в строке “T.BEARING”, дальность цели в милях, в строке “RANGE”, курс цели в градусах, в строке “TCSR”, скорость цели в узлах, в строке “TSPD”

рис.2.4.49
Отображение траектории движения судна-цели.
11.1 Выполнить действия описанные в пункте 9.1, 9.2.
11.2 Навести курсор трекбола на кнопку “Plot”, которая располагается в правой нижней части экрана ПО РЛС/САРП, рис.2.4.50, обведена красным прямоугольником нажать ЛКТ.

рис.2.4.50
11.3 Внизу экрана над кнопкой “Plot”, появится две кнопки рис.2.4.51. Подвести курсор трекбола на кнопку “HISTOFF”, нажать ЛКТ. Кнопка “HISTOFF”, рис.2.4.52 обведена красным прямоугольником.

рис.2.4.51

рис.2.4.52
11.4 После нажатия ЛКТ, кнопка “HISTOFF” поменяет надпись на “HISTON” рис.2.4.53.

рис.2.4.53
11.5 Засечь 8 минут. Через девять минут в ИКО за целью номер 1 взятой на автосопровождение, будут стоять 4 равноудаленных траекторных точки желтого цвета, рис.2.4.54, обведены траекторные точки красным прямоугольником.

рис.2.4.54
Визуальная и звуковая сигнализация о любой сопровождаемой цели, которая по вычисленным данным имеет расстояние и время кратчайшего сближения, которые меньше значений, установленных оператором.
12.1 Пример рассматривается с использованием ситуации “RLS3.tsk”, методика загрузки ситуации на исполнения в главе 2.7. Взять на сопровождение цели согласно рис.2.4.55.
12.2 Навести курсор трекбола в окне ПО РЛС/САРП на окно выбора дистанции наикротчайшего сближения “CPALIMIT” рис.2.4.55, обведено красным прямоугольником. Нажать шесть раз ПКТ, значения дистанции наикротчайшего сближения станет равно 6 милям, рис.2.4.56.

рис.2.4.55
![]()
рис.2.4.56
12.3 Навести курсор трекбола в окне ПО РЛС/САРП на окно выбора времени наикротчайшего сближения “TCPALIMIT” рис.2.4.55, обведено зеленым прямоугольником. Нажать два раз ПКТ, значения дистанции наикротчайшего сближения станет равно 20 минутам, рис.2.5.57.
![]()
рис.2.4.57
12.4 Через 21минут 20 секунд после начала упражнения, цели номер 11 окажется на дистанции кратчайшего сближения менее чем 6 миль, за менее чем время кратчайшего сближения 20 минут, ПО РЛС/САРП выдаст визуальную и звуковую сигнализацию по цели номер 11, рис.2.4.58. Через устройства воспроизведения звука будет слышен звуковой сигнал(короткие гудки), а кружок автосопровождения над целью номер 11, станет красного цвета, рис.2.4.59, и справа от ИКО отобразится окно предупреждения “DANGERTAGERT11”, рис.2.4.60.
12.5 Навести курсор трекбола на цель номер 11, нажать ЛКТ. С право от ИКО появится окно информации о цели, согласно методики описанной в разделе 10, рис.2.4.61. В окне информации о цели, рис.2.4.62, в строке “CPA” значение 1.92 мили, обведено красным прямоугольником, значение дистанции кратчайшего сближения, через кратчайшее время указанное в строке “TCPA” значение 19:42 минуты, значение обведено зеленым прямоугольником. Таким образом дистанция и время кратчайшего сближения с целью меньше заданного в пунктах 12.2, 12.3. значит сигнализация сработала правильно

рис.2.4.61

рис.2.4.62
12.6 Для выключения звуковой сигнализации надо навести курсор трекбола на окно предупреждения “DANGERTAGERT11” и нажать ЛКТ. Звуковая сигнализация выключится окно предупреждения “DANGERTAGERT11” перестанет отображаться, рис.2.4.63. Графическая сигнализация(красный кружок над целью 11) будет отображаться.

рис.2.4.63
Проигрывания (имитация) маневра собственного судна на расхождение со всеми сопровождаемыми целями с упреждением по времени или без него относительно момента имитации, курсом и скоростью.
13.1 Пример рассматривается с использованием ситуации “RLS3.tsk”, методика загрузки ситуации на исполнения в главе 2.7. Взять на сопровождение цели согласно рис.2.4.55.
13.2 Навести курсор трекбола на кнопку “Trial”, которая располагается в правой нижней части экрана ПО РЛС/САРП, рис.2.4.64, обведена красным прямоугольником нажать ЛКТ.

рис.2.4.64
13.3 На экране ПО РЛС/САРП справа от ИКО появится окно задание параметров имитации маневра, обведено зеленым прямоугольником, рис.2.4.65, а в ИКО появится символ собственного судна(крестик из линий белого цвета), которым проигрывается маневр, рис.2.4.66.

рис.2.4.65
![]()
рис.2.4.66
13.4 Упреждение времени маневра выставляется путем наведения курсора трекбола на окно задание параметров имитации маневра, нажатия ПКТ, удерживания ПКТ и перемещения курсора трекбола по вертикальной плоскости монитора, таким образом после нажатия ПКТ, перемещаем курсор трекбола вниз пока значение времени “DELAY” не будет равно 1 минуте рис.2.4.67.

рис.2.4.67
13.5 Задание скорости маневра производится путем наведения курсора трекбола на окно задание параметров имитации маневра, нажатия ЦКТ, удерживания ЦКТ и перемещения курсора трекбола по вертикальной плоскости монитора, таким образом после нажатия ЦКТ, перемещаем курсор трекбола вверх пока значение скорости “SPEED” не будет равно 10 узлам рис.2.4.68.

рис.2.4.68
13.6 Задание курса маневра производится путем наведения курсора трекбола на окно задание параметров имитации маневра, нажатия ЛКТ, удерживания ЛКТ и перемещения курсора трекбола по вертикальной плоскости монитора, таким образом после нажатия ЛКТ, перемещаем курсор трекбола вверх пока значение курса “COURSE” не будет равно 210 градусам рис.2.4.69.

рис.2.4.69
13.7 В ИКО символ собственного судна, которым проигрывается маневр, сместится относительно настоящего местоположения судна(центр ИКО) на заданные значения в пунктах 13.4–13.6, все графические обозначения автосопровождения целей (кружки автосопровождения, вектора) будут отображаться относительно(с учетом собственного курса и скорости) совершенного маневра, рис.2.4.70.
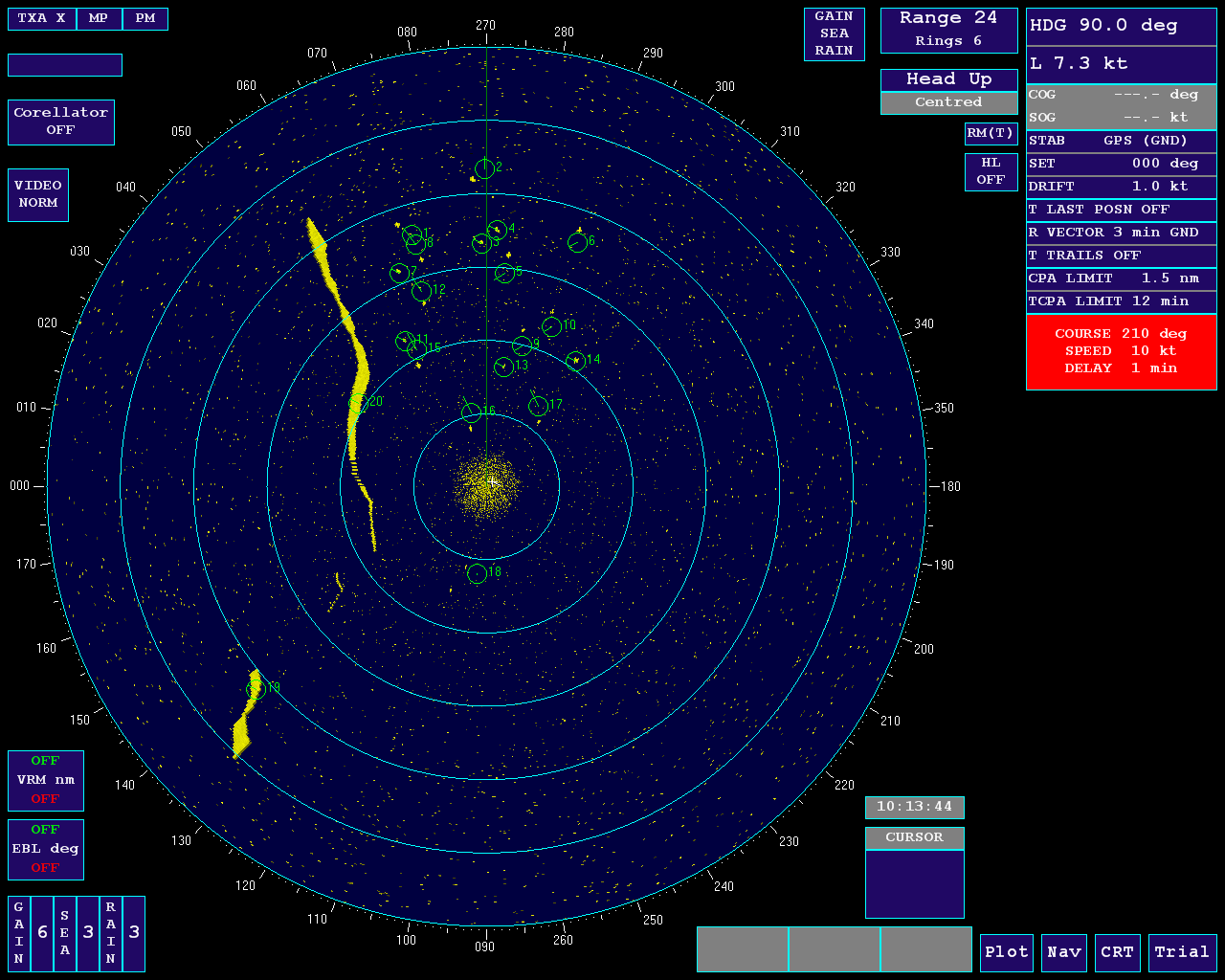
рис.2.4.70
Послесвечение эхосигнала (накопление предыдущих эхосигналов цели в определенный период времени).
14.1 Пример рассматривается с использованием ситуации “RLS1.tsk”, методика загрузки ситуации на исполнения в главе 2.7.
14.2 Для включения функции отображения послесвечения эхосигнала надо нажать ЛКТ, когда курсор трекбола находится над окном изменения периода времени отображения послесвечения эхосигнала “Trails”, рис.2.4.71, окно обведено красным прямоугольником. После нажатия ЛКТ в окне “Trails”, вместо слова “OFF” , будет отображаться значения периода времени отображения послесвечения эхосигнала, значение времени 2 минуты, рис.2.4.72.
14.3 Для увеличения периода времени отображения послесвечения эхосигнала надо нажать ПКТ, когда курсор трекбола находится над окном изменения периода времени отображения послесвечения эхосигнала “Trails”. После нажатия ПКТ в окне “Trails”, вместо значения времени 2 минуты, будет отображаться значения времени 3 минуты. рис.2.4.73.

рис.2.4.71
![]()
рис.2.4.72
![]()
рис.2.4.73
14.4 Через три минуты работы функции накопления эхосигнала на ИКО будет отображаться следующая картина, рис.2.4.74.
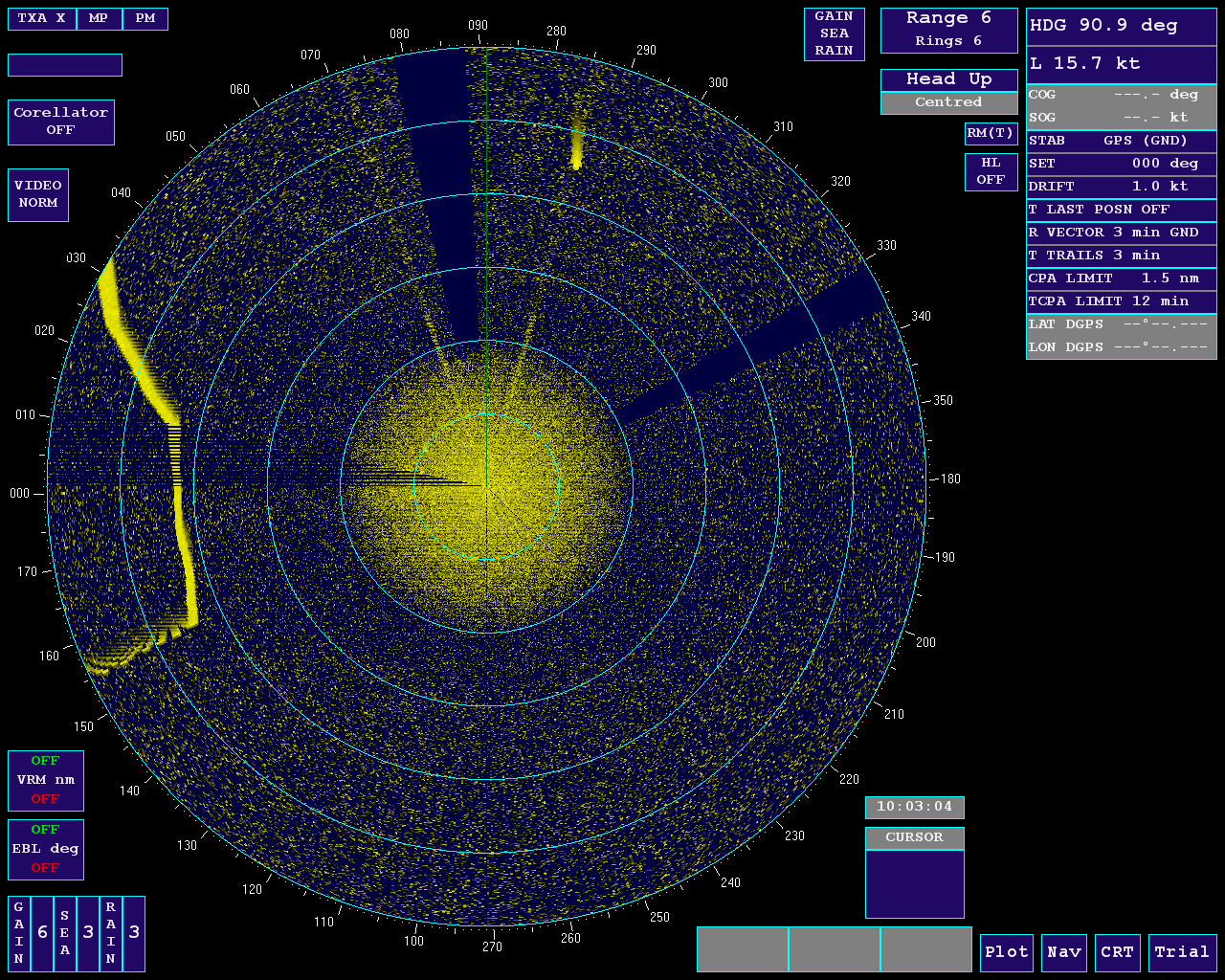
рис.2.4.74
Сектора затемнения (сектора обзора локаторов в которых нельзя получить эхосигнал).
Имитация секторов затемнения хорошо видна если выполнить действия описанные в разделе 14. Выполнив действия описанные в разделе 14, на ИКО, рис.2.4.75, будут четко видны сектора затемнения, сектора в которых нельзя получить эхосигнал, таких секторов два присутствует в данном примере, один сектор выделен зеленой линией, второй — красной.

рис.2.4.75