

ЛЕКЦИЯ_1 / Основы теории автоматического управления - УП - Лазарева-Мартемьянов - 2004 - 352
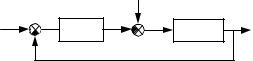
.pdfВыходной сигнал последнего звена является выходом всей системы: у(s) = уn(s), а передаточная функция системы согласно определению имеет вид
Wc (s) = xy((ss)) = yxn((ss)) .
Проводя последовательную подстановку, получают передаточную функцию последовательного соединения
n |
|
Wc (s) = W1(s)W2 (s) ... Wn (s) = ∏Wi (s) . |
(5.82) |
i=1
x1 |
|
y1 |
|
y2 |
… |
|
|
|
yn |
||||
W1 |
W2 |
|
|
Wn |
|||||||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
||||||||||
Рис. 5.31 Последовательное соединение звеньев
Таким образом, передаточная функция системы последовательно соединенных звеньев равна произведению передаточных функций отдельных звеньев.
Частотные характеристики легко получают из (5.82), так как
|
|
n |
|
|
|
n |
n |
i∑ ϕ j (ω) |
|
|
|
Wc (iω) = ∏W j (iω) = ∏M j (ω)e j |
, |
|
|
||
j =1 |
j =1 |
|
|
|
|
и тогда |
|
|
|
|
|
|
|
n |
|
n |
|
|
|
Mc (ω) = ∏Mi (ω); |
ϕc (ω) = ∑ϕi (ω) , |
(5.83) |
|
|
|
j =1 |
|
j =1 |
|
т.е. амплитудно-частотная характеристика последовательного соединения равна произведению АЧХ отдельных звеньев, а фазочастотная – сумме ФЧХ отдельных звеньев. Иллюстрация построения АФХ двух последовательно соединенных звеньев, заданных своими АФХ, приведена на рис. 5.32.
Переходную функцию получают следующим образом. Если входной сигнал x(t) = 1(t), то на выходе первого звена имеем его переходную функцию h1(t), которая подается на вход второго звена. На выходе второго звена получают переходную функцию двух последовательно соединенных звеньев. Если собственная переходная функция второго звена h2(t), то переходная функция соединения определится через интеграл Дюамеля:
|
t |
|
dh1(t − τ) |
|
|
|
|
h (t) = |
∫ |
h (τ) |
dτ + h (0)h (t) . |
(5.84) |
|||
dτ |
|||||||
c |
2 |
1 |
2 |
|
|||
|
|
|
|||||
|
0 |
|
|
|
|
|
|
Продолжая рассуждения дальше, можно получить выражение переходной функции для любого числа последовательно соединенных звеньев.
Im |
|
а) |
Im |
|
б) |
|
Im |
|
|
в) |
||
ϕ1 |
k1 |
k2 |
|
|
k1 k2 |
|
||||||
|
|
|
|
|
|
|
|
|||||
|
Re |
M2 |
ϕ2 |
Re |
|
|
|
ϕ1+ϕ2 |
|
Re |
||
|
M1 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
M1 M2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 5.32 Построение АФХ последовательного соединения:
а – АФХ первого звена; б – АФХ второго звена;

в – АФХ последовательного соединения первого и второго звеньев Следует отметить, что все полученные утверждения справедливы только для звеньев направленного
действия.
Примером технологического объекта, имеющего структурную схему последовательного соединения, является любой технологический процесс, в котором отдельные стадии и участки представляются в виде соответствующего звена.
5.3.4 СОЕДИНЕНИЕ С ОБРАТНОЙ СВЯЗЬЮ
Обратной связью называют передачу сигнала с выхода звена на его вход, где сигнал обратной связи алгебраически суммируется с внешним сигналом. Структурная схема соединения с обратной связью изображена на рис. 5.33.
Если х1 = х + xос, то связь называется положительной, если же х1 = х – xос, то – отрицательной.
Для вывода передаточной функции соединения с положительной обратной связью выходные сигналы для каждого звена в операторной форме записываются как:
y(s) = x1(s)Wпр(s); x1(s) = x(s) + xос(s); xос(s) = y(s)Wос(s) .
Исключая из полученной системы х1(s) и хос(s), получают
y(s) = x(s)Wпр(s) + y(s)Wос(s)Wпр(s) ;
y(s)(1−Wос(s)Wпр(s)) = x(s)Wпр(s) ,
откуда передаточная функция соединения с положительной обратной связью имеет вид
Wc (s) = |
y(s) |
= |
|
Wпр(s) |
|
. |
(5.85) |
|
x(s) |
1−W (s)W (s) |
|||||||
|
|
|
|
|||||
|
|
|
|
пр |
ос |
|
|
|
Для соединения с отрицательной обратной связью передаточная функция выводится аналогичным образом и определяется в окончательном виде выражением
|
|
|
|
|
|
|
|
|
|
Wпр(s) |
|
||
|
|
|
|
|
|
Wc (s) = |
|
|
|
. |
(5.85 ) |
||
|
|
|
|
|
|
1 |
+W |
(s)W (s) |
|||||
|
|
|
|
|
|
|
|
|
|
пр |
ос |
|
|
x |
|
|
x1 |
|
|
|
y |
|
|
|
|
|
|
|
Wпр(s) |
|
|
|
|
|
|
|
|||||
|
|
|
xос |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Wос(s) |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 5.33 Соединение с обратной связью
На практике наиболее распространенными являются системы с отрицательной обратной связью, к ним относятся, например, все одноконтурные системы автоматического регулирования, причем в прямой цепи расположен объект, а в обратной – регулятор.
5.3.5 ПЕРЕДАТОЧНЫЕ ФУНКЦИИ ЗАМКНУТОЙ СИСТЕМЫ
Структурная схема одноконтурной системы автоматического регулирования приведена на рис. 5.34.
В расчетах систем автоматического регулирования используют три основных вида передаточных функции. Эти функции определяются следующим образом.
Главной передаточной функцией является передаточная функция по каналу регулирования yзад − y(t), f0 (0) = 0 :
|
Wоб (s)Wр (s) |
|
|
W (s) = |
|
. |
(5.86) |
1+Wоб (s)Wр (s) |
|||
Передаточная функция замкнутой системы для ошибки, т.е. по каналу yзад − ε(t), где |
ε(t) = yзад(t) − y(t) – |
||
ошибка регулирования и f0(t) = 0:
Wε(s) = |
|
|
1 |
. |
|
(5.87) |
1+W |
(s)W (s) |
|
||||
|
|
об |
р |
|
||
Передаточная функция замкнутой системы по возмущающему |
воздействию, т.е. по |
каналу |
||||
f0 (t) − y(t)= 0 : |
|
|
|
|
|
|
|
|
Wоб (s) |
|
|||
W f (s) = |
|
. |
(5.88) |
|||
1+Wоб (s)Wр (s) |
||||||
Анализ передаточных функций замкнутой системы показывает, что знаменатель у них один и тот же, а числители различны. Для замкнутой системы можно записать целый ряд других передаточных функций, например, для ошибки по возмущающему воздействию.
Характеристическое уравнение замкнутой системы находится в знаменателе передаточной функции и записывается в виде
yзад |
|
|
f0(t) |
y(t) |
ε |
W (s) |
Wоб(s) |
||
|
|
р |
|
|
–y |
|
|
|
|
Рис. 5.34 Структурная схема одноконтурной системы |
|
1+Wоб (s)Wр (s) = 0 . |
(5.89) |
Корни этого уравнения равны полюсам si передаточной функции замкнутой системы. Динамические свойства процессов, протекающих в замкнутой системе, существенно отличаются от таковых в разомкнутой цепи, состоящей из тех же самых звеньев. Так как передаточная функция разомкнутой цепи записывается в виде Wр.с(s) = Wоб(s)Wр(s), то главная передаточная функция может быть записана как
|
Wр.с(s) |
||
W (s) = |
|
|
. |
1+W |
(s) |
||
|
р.с |
|
|
5.3.6 ПРАВИЛА ПРЕОБРАЗОВАНИЯ СТРУКТУРНЫХ СХЕМ
Реальные объекты обладают сложной структурой. Упрощение вывода передаточных функций сложных объектов в схемах достигается за счет преобразования их структурных схем к трем основным типам соединений.
Критерий правильности преобразования структурной схемы заключается в том, чтобы входные и выходные сигналы преобразуемого участка до и после преобразования были одинаковы.
На практике редко встречаются схемы, в которых можно сразу же выделить тот или иной тип соединений, как правило, имеются, так называемые, перекрестные связи. В этом случае возникает необходимость перестановки и переноса сумматоров и узлов.
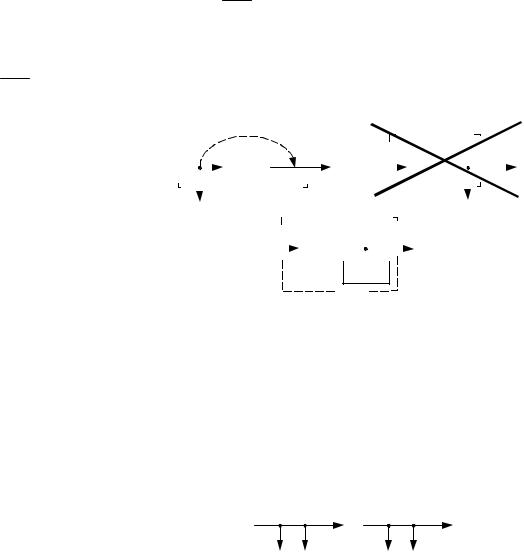
Например, требуется осуществить перенос узла через звено по направлению распространения сиг-
нала (рис. 5.35, а).
Преобразованию подлежит участок, выделенный пунктиром, который имеет один входной сигнал x (t) и два выходных x (t) и у (t). Требуется перенести узел "1" через звено " 2" с передаточной функцией
W(s).
Простой перенос приводит к схеме, изображенной на (рис. 5.35, б). Эта схема не соответствует исходной, так как отсутствует выходной сигнал x (t), но имеются два сигнала y (t), причем у (s) = x (s) W(s), следовательно, для приведения схемы к исходной необходимо в боковую ветвь на выходе у (t) включить
звено с передаточной функцией W1(s) . Тогда получают схему (рис. 5.35, в), соответствующую исходной.
Таким образом, перенос узла через звено с передаточной функцией W(s) по направлению распространения сигнала сопровождается появлением в боковой цепи звена, имеющего передаточную функцию
W1(s) .
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|||||||
x |
(1) |
|
(2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
x |
(2) |
|
|
|
|
(1) |
|
y |
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W(s) |
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
W(s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в) |
|
|
|
|
|
|
|
|
|
y |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
(1) |
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W(s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1/W(s)


 y
y
Рис. 5.35 Пример переноса узла через звено:
а– до преобразования; б – неправильное преобразование;
в– после преобразования
Рассмотренный пример является доказательством правила переноса узла через звено. Остальные правила переноса приводятся без доказательства и выглядят следующим образом.
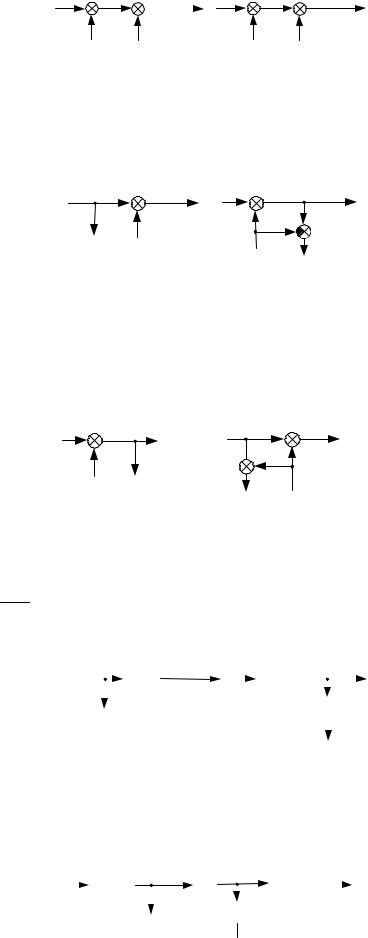
1 Перенос узла через узел осуществляется без дополнительных преобразований (рис. 5.36).
x (1) |
(2) |
xа) x (2) |
(1) |
xб) |
x |
x |
x |
x |
|
Рис. 5.36 Перенос узла через узел:
а – до переноса; б – после переноса
2 Перенос сумматора через сумматор производится без дополнительных преобразований (от перемены мест слагаемых сумма не изменяется) (рис. 5.37).
x1 |
x1 +x2 x1 + x2 + x3 x1 |
|
x1 +x3 x1 + x2 + x3 |
x2 |
x3 |
x3 |
x2 |
Рис. 5.37 Перенос сумматора через сумматор:
а – до преобразования; б – после преобразования 3 При переносе узла через сумматор по направлению сигнала в боковой ветви преобразованного
участка появляется дополнительное звено с передаточной функцией (−1) (рис. 5.38).
x1 |
x1 + x2 |
а) |
x1 |
|
x1 + x2 |
б) |
x1 |
x2 |
|
|
x2 |
x1 |
|
|
|
|
|
|
||
|
|
|
|
|
|
Рис. 5.38 Перенос узла через сумматор:
а – до преобразования; б – после преобразования
4 При переносе сумматора через узел по направлению сигнала в боковой ветви появляется звено с передаточной функцией +1 (рис. 5.39).
x1 |
x1 + x2 а) |
x1 |
x1 + x2 б) |
x2 |
x1 + x2 |
x1 + x2 |
x2 |
|
|
Рис. 5.39 Перенос сумматора через звено:
а – до преобразования; б – после преобразования
5 Перенос узлачерез звенопонаправлениюсигнала приводиткпоявлениюдополнительного звена спередаточнойфункцией W1(s) (рис. 5.40).
|
|
|
|
а) |
|
|
б) |
||||
x |
|
x W(s) |
x |
|
|
|
x W(s) |
||||
W(s) |
W(s) |
|
|||||||||
|
|
|
|
|
|
|
|
||||
|
x |
|
|
||||||||
|
1/W(s) |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
||
|
|
|
|
|
|
|
|
|
|||
Рис. 5.40 Перенос узла через звено:
а – до преобразования; б – после преобразования
6 При переносе узла через звено против направления сигнала появляется дополнительное звено с передаточной функцией W(s) (рис. 5.41).
|
|
|
|
а) |
|
|
|
|
б) |
|
x |
|
|
|
x W(s) |
x |
|
|
|
x W( |
s) |
|
|
|
|
W(s) |
||||||
W(s) |
|
|||||||||
|
|
|
x W(s) |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W(s) |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
 x W(s)
x W(s)
Рис. 5.41 Перенос звена через узел:
а – до преобразования; б – после преобразования
7 Перенос сумматора через звено по направлению сигнала сопровождается появлением дополнительного звена с передаточной функцией W(s) (рис. 5.42).
|
|
|
|
а) |
|
|
|
|
|
|
б) |
|
x1 x1 + x2 |
|
W(x1 + x2) |
x1 |
|
|
|
W(x1 + x2) |
|||||
W(s) |
W(s) |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
W(s) |
|
|||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 5.42 Перенос сумматора через звено:
а – до преобразования; б – после преобразования
8 Перенос сумматора через звено против направления сигнала приводит к появлению дополни-
тельного звена с передаточной функцией |
|
1 |
(рис. 5.43). |
|
|||||||||||||
W (s) |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
б) |
|||
|
|
|
|
|
|
|
|
|
|
|
x1 |
|
|
|
|
x1W + x2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W(s) |
||||
|
x1 |
|
|
|
|
|
x1 W + x2 |
|
|
|
|||||||
|
W(s) |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 |
|
|
|
|
1/W(s) |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2
Рис. 5.43 Перенос звена через сумматор:
а – до преобразования; б – после преобразования
9 Вынесение элемента из прямой связи приводит к появлению дополнительных звеньев, в прямой
цепи |
1 |
и в дополнительной W2(s) (рис. 5.44). |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
W (s) |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
|
|
|
|
|
|
б) |
||
|
|
|
x |
|
|
W1(s) |
|
y |
x |
|
|
|
|
|
W1(s) |
|
|
1/W2(s) |
|
y |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
W2(s) |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W2(s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 5.44 Вынесение элемента из прямой связи:
а – до преобразования; б – после преобразования
10 Внесение элемента в прямую связь сопровождается появлением в одной и второй прямых цепях звеньев с передаточной функцией W2(s) и в дополнительной цепи – звена с передаточной
функцией W1(s) (рис. 5.45).
|
а) |
|
б) |
W1 |
(s) |
W1(s) |
W2(s) |
x |
y |
x 1/W2(s) |
y |
|
|
||
|
|
|
W2(s) |
Рис. 5.45 Внесение элемента в прямую связь:
а – до преобразования; б – после преобразования
11 |
Вынесение элемента из обратной связи сопровождается появлением в прямой цепи элемента с пе- |
||||||||||||||||||||||||||||||||||||||||||||
редаточной функцией W2(s), а в дополнительной цепи – звена с передаточной функцией |
1 |
(рис. 5.46). |
|||||||||||||||||||||||||||||||||||||||||||
W (s) |
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
y |
а) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
W1(s) |
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1/W2(s) |
|
|
|
|
|
W2(s) |
|
|
|
W1(s) |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
W2(s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 5.46 Вынесение элемента из обратной связи: |
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
а – до преобразования; б – после преобразования |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
12 |
Внесение элемента в обратную связь сопровождается появлением в обратной связи звена с пе- |
||||||||||||||||||||||||||||||||||||||||||||
редаточной функцией W2(s), в прямой цепи – звена с передаточной функцией |
1 |
, в дополнительной – |
|||||||||||||||||||||||||||||||||||||||||||
W (s) |
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
звена с передаточной функцией W2(s) (рис. 5.47). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
y а) |
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
W1(s) |
|
|
|
|
W2(s) |
|
|
|
|
|
|
1/W2(s) |
|
|
|
|
W1(s) |
|
|
|
y |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W2(s)
Рис. 5.47 Внесение элемента в обратную связь:
а – до преобразования; б – после преобразования
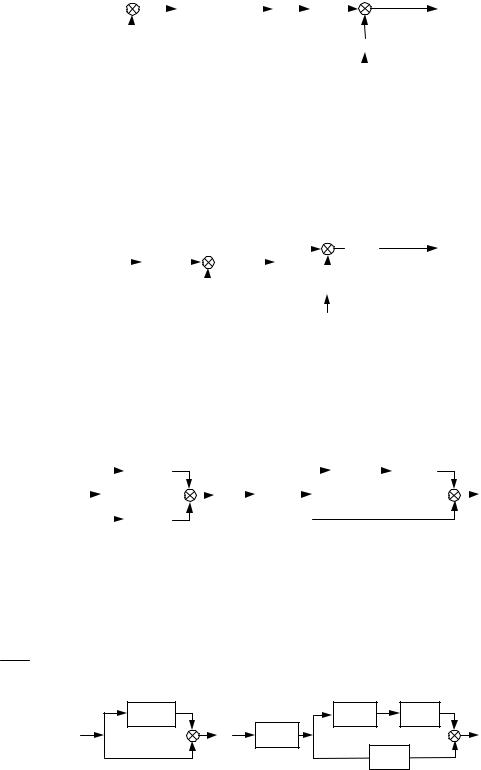
Пример 5.1 Записать передаточную функцию соединения, изображенного на рис. 5.48.
W (s) =W1(s)[W2 |
(s) +W3(s) +W4 |
(s)] |
|
|
|
W5(s) |
|
|
. |
||||||||||||
1 |
−W5(s)W6 (s) |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
W2(s) |
|
|
|
|
|
|
|
|
|
y |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
W1(s) |
|
|
|
|
|
W3(s) |
|
|
|
|
|
|
|
W5(s) |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W4(s) |
|
|
|
|
|
|
|
W6(s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 5.48 Структурная схема некоторого объекта
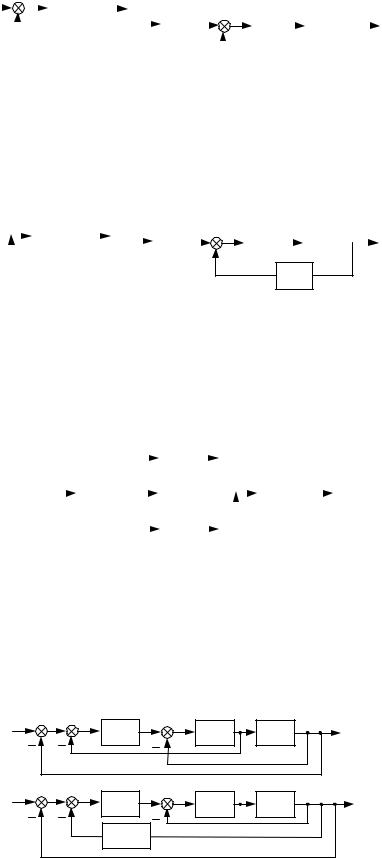
Пример 5.2 Преобразовать структурную схему (рис. 5.49) и записать передаточную функцию
W (s)= |
|
|
W1(s)W2 (s)W3(s) |
|
|
. |
||
1+W |
(s)W |
(s)+ W |
(s)W |
(s)+ W |
(s)W |
(s)W (s) |
||
1 |
2 |
2 |
3 |
1 |
2 |
3 |
|
|
1 |
2 |
3 |
W2(s) 1 |
|
2 |
3 |
а) |
|
|
W1(s) |
W3(s) |
|
|||
|
|
|
|
|
|
|
б) |
W1(s) |
W2(s) |
W3(s) |
2 1 3 |
1/W3(s) |
|
|
|
Рис. 5.49 Структурная схема некоторогообъектасперекрестными связями:
а– до преобразования; б – после преобразования
5.3.7ФОРМУЛА МЕЙСОНА

При выводе передаточных функций сложных структурных схем не всегда бывает удобно пользоваться правилами преобразования. В 1953 г. Мэйсоном было предложено правило вычисления передаточной функции между двумя заданными узлами. Это правило выражается следующей формулой
|
|
r |
b |
|
|
|
|
|
∑Wnp j (s) |
|
+Wркi (s)) |
|
|
|
|
∏(1 |
|
|
||
|
|
|
|
|
|
|
|
|
|
i=1 |
|
|
|
Wmn (s) = |
j=1 |
|
, |
(5.90) |
||
|
|
|
||||
|
|
b |
|
|
|
|
|
|
∏(1+Wркi |
(s)) |
|
|
|
|
|
i=1 |
|
|
|
|
r
где Wmn(s) – передаточная функция между узлами m и n; ∑Wпp j (s) – сумма r передаточных функций
j =1
различных прямых путей из узла m в узел n; Wркi (s) – передаточная функция разомкнутого контура, взя-
тая со знаком, соответствующим отрицательной обратной связи; П – произведение, включающее все замкнутые контуры системы; * – знак обозначает исключение из скобки всех членов, содержащих произведения передаточных функцийоднихитехжезвеньев, включаяизвеньясW(s) = 1.
Пример 5.3 Записать передаточную функцию системы (рис. 5.50) по каналу (х – у).
В структурной схеме объекта по каналу (х – у) имеется один прямой путь (r = 1) с передаточной функцией Wпр1(s) = W1(s) W2(s) и два замкнутых контура (b = 2) с передаточными функциями разомкнутых цепей с отрицательными обратными связями:
Wрк1 (s) =W1(s)W2 (s)W3 (s)W4 (s) ;
Wрк2 (s) =W1(s)W4 (s) .
Подставляя полученное выражение в (5.90), получают:
|
[W (s)W (s)(1+W (s)W (s))(1+W (s)W (s)W (s)W (s))] |
. |
||||||||||||||||
Wx-y (s)= |
1 |
2 |
|
1 |
4 |
|
|
1 |
2 |
3 |
4 |
|||||||
|
[(1+W (s)W (s))(1+W (s)W (s)W (s)W (s))] |
|||||||||||||||||
|
|
1 |
4 |
|
1 |
2 |
3 |
4 |
|
|
||||||||
|
|
|
x |
|
|
|
|
|
|
|
|
|
y |
|
|
|||
|
|
|
W1(s) |
|
|
|
|
W2(s) |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W3(s) |
|
|
|
|
W4(s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 5.50 Структурная схема технологического объекта
Раскрывая скобки и исключая члены, содержащие передаточные функции общих ветвей, окончательно получают:
Wx-y (s) = |
|
|
W1(s)W2 |
(s) |
. |
|
1+W1 |
(s)W2 |
(s) +W1(s)W2 (s)W3 (s)W4 (s) |
||||
|
|
|||||
5.4 Типовые законы регулирования
Законом регулирования называется уравнение, описывающее зависимость между входом регулятора ∆y(t) = y(t) − yзад и его выходом xр(t).
Все законы регулирования подразделяются на простейшие: пропорциональный (П), интегральный (И), дифференциальный (Д) и промышленные: пропорционально-интегральный (ПИ), пропорциональ- но-дифференциальный (ПД), пропорционально-интегрально-дифференциальный (ПИД).
Ниже приводится характеристика всех законов регулирования с точки зрения их динамических свойств.
5.4.1 ПРОПОРЦИОНАЛЬНЫЙ ЗАКОН РЕГУЛИРОВАНИЯ
Пропорциональный закон регулирования описывается уравнением
xp (t) = −S1∆y(t) , |
(5.91) |
где S1 – параметр настройки.
Знак (–) отражает тот факт, что регулятор включается в систему по принципу отрицательной обратной связи.
Пропорциональным регулятором может служить обычное усилительное звено с изменяемым коэффициентом усиления, включенное в отрицательную обратную связь по отношению к объекту. В связи с этим динамические характеристики П-регулятора в основном совпадают с характеристиками усилительного звена и имеют вид:
передаточная функция
W (s) = −S1 ; |
(5.92) |
частотныехарактеристики, графикикоторыхизображенынарис. 5.51:
|
АФХ |
|
|
|
|
W (iω) = −S1 = S1eiπ ; |
(5.93) |
||||
|
АЧХ |
|
|
|
|
M (ω) = S1 ; |
(5.94) |
||||
|
ФЧХ |
|
|
|
|
ϕ(ω) = π . |
(5.95) |
||||
M |
|
|
а) |
ϕ |
|
|
б) |
Im |
|
в) |
|
s1 |
|
|
|
π |
|
|
|
-s1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
ω |
0 |
|
ω |
0 |
Re |
|
||
Рис. 5.51 Частотные характеристики П-регулятора:
а – АЧХ; б – ФЧХ; в – АФХ
∆y |
|
а) |
∆y |
|
|
б) |
|||
|
|
||||||||
|
|
|
|
|
|
|
|
δ(t) |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
t |
|
0 |
|
|
|
t |
0 |
|
|
||
-h |
|
|
|
–w |
|
|
|
||
s1 |
|
|
|
|
|
|
s1 δ(t) |
||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
t |
0 |
|
|
t |
|
|
|
|
|
|
|
|
|
||
Рис. 5.52 Переходные характеристики П-регулятора:
а – переходная функция; б – весовая функция
Переходная функция (рис. 5.52, а):
h(t) = xp (t) = −S11(t) . |
(5.96) |
Весовая функция (рис. 5.52, б):
w(t) = −S1δ(t) . |
(5.97) |
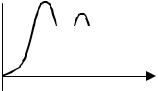
Для того, чтобы выяснить недостатки и достоинства того или иного закона регулирования, необходимо рассмотреть переходный процесс замкнутой системы.
Переходный процесс АСР с П-регулятором, изображенный на рис. 5.53, характеризуется тем, что имеется статическая ошибка регули рования, равная yуст – yзад. Действительно, по теореме о конечном значении функции можно записать:
y
yуст






yзад
t
Рис. 5.53 Переходный процесс АСР с П-регулятором
|
|
|
|
|
lim y(t) = lim sy(s) = lim sx(s)Wзс(s) , |
|||||
|
|
|
|
|
|
|
t→∞ |
s→0 |
s→0 |
|
так как x(s) = |
1 |
|
Wоб(s) |
|
|
Wоб(s) |
|
|||
|
; Wзс(s) = |
|
|
= |
|
|
|
, |
|
|
s |
1+W |
(s)W (s) |
|
1+W |
(s)S |
|
||||
|
|
|
об |
р |
|
|
об |
1 |
|
|
то
lim y(t)
t→∞
если limWоб(s) = kоб .
s→0
= |
s |
1 |
= |
|
Wоб (s) |
= |
|
|
kоб |
, |
(5.98) |
s |
|
1+Wоб (s)S1 |
1 |
|
|||||||
|
|
|
|
+ kобS1 |
|
||||||
Таким образом, статическая ошибка регулирования зависит от коэффициента усиления объекта и параметра настройки регулятора. Причем статическая ошибка тем меньше, чем больше значение параметра настройки S1. Для того, чтобы эта ошибка отсутствовала, т.е. ууст = 0 при kоб ≠ 0, необходимо,
чтобы S1 → ∞ . Следовательно, наличие статической ошибки регулирования является органическим недостатком АСР с пропорциональным регулятором.
5.4.2 ИНТЕГРАЛЬНЫЙ ЗАКОН РЕГУЛИРОВАНИЯ
Интегральный закон регулирования описывается уравнением
t |
|
xp (t) = −S0 ∫∆y(τ)dτ , |
(5.99) |
0 |
|
или |
(5.99 ) |
xp (t) = −S0∆y(t) , |
|
′ |
|
где S0 – параметр настройки регулятора.
Интегральным регулятором может служить интегрирующее звено с переменным передаточным коэффициентом, включенное в отрицательную обратную связь к объекту.
Динамические характеристики И-регулятора имеют вид:– передаточная функция
|
|
|
|
W(s) = – |
S0 |
; |
(5.100) |
||
|
|
|
|
|
|||||
– частотные характеристики, изображенные на рис. 5.54: |
|
|
s |
|
|
||||
|
|
|
|
|
|||||
АФХ |
W (iω) = |
−S0 |
= (S0 / ω)ei(π−π/ 2) = (S0 / ω)eiπ/ 2 ; |
(5.101) |
|
|
|
|
|
iω |
S0 |
|
|
|
|||||
|
|
|
|
|
|
|
|||
|
|
|
АЧХ |
M (ω) = |
; |
|
(5.102) |
||
|
|
|
ω |
|
|||||
|
|
|
|
|
|
|
|
||