

ЛЕКЦИЯ_1 / Основы теории автоматического управления - УП - Лазарева-Мартемьянов - 2004 - 352
.pdfM нэ(ω, A) = |
C1 |
; |
(10.11) |
|
A |
||||
|
|
|
– фазочастотная характеристика
ϕнэ(ω, A) = ϕвых (ω, A) − ϕвых (ω) ; |
(10.12) |
– амплитудно-фазовая характеристика
Wнэ(iω, A) = M нэ(ω, A) eiϕнэ (ω, A) . |
(10.13) |
Так как характеристики (10.11) – (10.13) были получены для линеаризованной системы, то они получили название эквивалентных.
На практике широкое распространение получили обратные частотные характеристики:
– обратная АФХ:
W (iω, A) = |
1 |
= M |
”‡р |
(ω, A) eiϕ”‡р (ω, A) ; (10.14) |
|
||||
обр |
W’э(iω, A) |
|
|
|
|
|
|
|
– обратная АЧХ:
M обр (ω, A) = |
1 |
; |
(10.15) |
|
M нэ(ω, A) |
||||
|
|
|
– обратная ФЧХ:
ϕобр (ω, A) = −ϕнэ(ω, A) . |
(10.16) |
Рассмотрим несколько примеров.
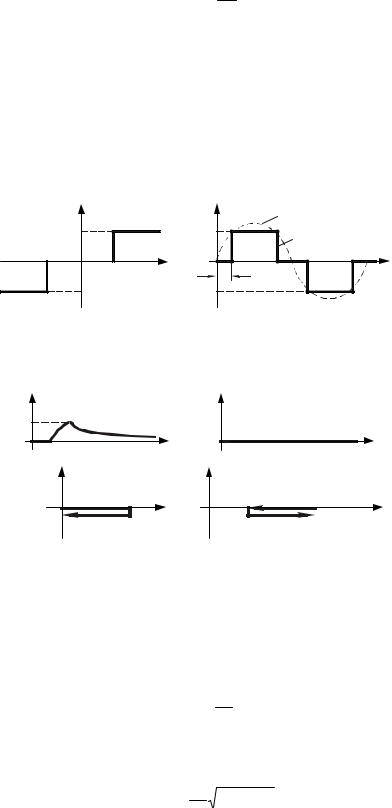
Пример 10.1 Построить эквивалентные частотные характеристики для нелинейного элемента – двухпозиционного реле (рис. 10.6, а).
Так как характеристика однозначна, то коэффициент b1 = 0 , а коэффициент a1 определится следующим образом, период T0 = 2π .
|
1 |
2π |
B |
|
|
a1 = |
∫B sin ωtd(ωt) = |
. |
|||
πA |
|
||||
|
0 |
πA |
|||
|
|
|
|
||
Следовательно,
– эквивалентная амплитудно-частотная характеристика (рис. 10.12, а)
M нэ(A) = πBA ;
– эквивалентная фазочастотная характеристика (рис. 10.12, б)
ϕнэ(A) = 0 ;
– эквивалентная амплитудно-фазовая характеристика (рис. 10.12, в)
|
W (iA) = B |
|
; |
|
|
|
нэ |
πA |
|
|
|
|
|
|
|
||
Mнэ |
а) |
|
ϕнэ |
б) |
|
|
A |
|
|
|
A |
|
|
|
|
|
|
i Im(A) |
|
в) i Imобр(A) |
|
|
г) |
|||||
|
|
A = ∞ |
A = 0 |
A = 0 |
A = ∞ |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Re(A) |
|
Reобр(A) |
|||||
|
|
|
|
|
|
|
|
|
|
|
Рис. 10.12 Эквивалентныечастотныехарактеристикидвухпозиционногореле:
а – АЧХ; б – ФЧХ; в – АФХ; г – инверсная АФХ
– инверсная амплитудно-фазовая характеристика (рис. 10.12, г)
Wобр(iA) = πBA .
В результате гармонической линеаризации двухпозиционное реле заменяется линейной статической системой.
Пример 10.2 Построить эквивалентные частотные характеристики для двухпозиционного реле с зонойнечувствительности (рис. 10.13, а). Так как характеристика однозначна, то b1 = 0 ,
|
4 |
π/ 2 |
4B |
|
a1 = |
|
∫B sin ωtd(ωt) = |
|
cos α , |
πA |
πA |
|||
|
|
α |
|
|
где α = arcsina / A (рис. 10.13, б).
yнэ |
а) |
yнэ |
x |
б) |
B |
|
B |
|
yнэ |
- а |
|
|
|
|
а |
x |
α |
|
ωt |
- B |
|
- B |
|
|
|
|
|
|
Рис. 10.13 Гармоническая линеаризация двухпозиционного реле с зоной нечувствительности:
а – статическая характеристика; б – входной и выходной сигнал
Mнэ |
а) ϕнэ |
б) |
B
|
A/a |
|
|
A/a |
iIm(A/a) |
в) |
iImобр(A/a) |
|
г) |
A = a |
B |
I/B |
A = 0 |
|
A → ∞ |
Re(A/a) |
|
A = a |
Reобр(A/a) |
Рис. 10.14 Эквивалентные частотные характеристики двухпозиционного реле с зоной нечувствительности:
а – АЧХ; б – ФЧХ; в – АФХ; г – инверсная АФХ
Согласно определению эквивалентных частотных характеристик имеем:
– эквивалентная амплитудно-частотная характеристика
M нэ(A) = 4πBA cosα ,
которую обычно записывают как функцию не амплитуды входного сигнала, а отношения (A/ a) , что соответствует измерению A в единицах a , и, следовательно,
M нэ(A/ a) = |
4a |
1− (a / A)2 ; |
|
πA |
|
– эквивалентная фазочастотная характеристика
ϕнэ(A/ a) = 0 .
Графики эквивалентных частотных характеристик изображены на рис. 10.14.

10.3.3 ВИБРАЦИОННАЯ ЛИНЕАРИЗАЦИЯ
Для линеаризации релейных элементов часто применяют вибрационную линеаризацию путем создания высокочастотных колебаний на их входе. В этом случае релейный элемент линеаризуется, и поэтому вся система в целом ведет себя как система непрерывного действия.
Эффект вибрационной линеаризации может быть описан с помощью метода гармонической линеаризации. Сущность вибрационной линеаризации применительно к двухпозиционному реле может быть проиллюстрирована следующим образом. Если на вход двухпозиционного реле подать чисто переменный сигнал x(t) = Asin ωt , то на выходе получается также чисто переменный сигнал в виде прямо-
угольной волны (рис. 10.15). Если же на вход подать сумму сигналов: переменного и постоянного значения, т.е. x(t) = x0 + Asin ωt , где x0 – const, то на выходе вследствие изменения скважности выходных
импульсов в выходном сигнале появится постоянная составляющая y0 , величина которой зависит от величины x0 на входе реле (рис. 10.15). Зависимость постоянной составляющей y0 на выходе реле от величины постоянной составляющей x0 на его входе показана на рис. 10.15, г.
Форма этой зависимости определяется формой входного переменного сигнала и релейной характеристикой. Таким образом, постоянную составляющую входного сигнала релейный элемент пропускает как звено непрерывного действия. При этом для малых величин постоянного сигнала звено является линейным.
Высокочастотные воздействия, осуществляющие вибрационную линеаризацию, могут быть получены тремя способами: с помощью генератора, создающего вынужденные колебания системы, путем автоколебаний в самой САУ и путем создания скользящего режима.
y |
а) |
yнэ |
yнэ |
в) |
B |
|
B |
|
|
|
|
y0 |
||
|
|
|
|
|
- B |
x |
|
|
t |
|
- B |
|
|
|
|
|
|
|
|
|
б) |
|
y |
г) |
|
x |
|
||
|
|
|
|
|
|
x0 |
|
xmax |
x0 |
|
|
|
|
|
t |
|
|
|
|
Рис. 10.15 Эффект вибрационной линеаризации:
а– статическая характеристика; б – входные сигналы; в – выходные сигналы;
г– зависимость постоянной составляющей на выходе от постоянной составляющей на входе
10.4 Тренировочные задания
1 Система автоматического управления называется нелинейной, если она не подчиняется принципу суперпозиции. Различают два вида нелинейностей: статические – это нелинейности статических характеристик и динамические – это нелинейности дифференциальных уравнений. Простейшими нелинейными элементами являются статические нелинейности, у которых выходная переменная зависит только от входной переменной, причем эта зависимость строго однозначна: yнэ = f (x) . Такие не-
линейности называются типовыми.
А Как доказать, что система относится к классу нелинейных систем автоматического управления?
B Что представляют собой статические нелинейности и динамические нелинейности? С Приведите пример типовых нелинейных элементов.
2Как известно, особенности нелинейных систем вытекают из неподчинения принципу суперпозиции, основными из которыхявляются следующие: выходной сигнал внелинейных системахотличается от входногогармонического сигнала как поформе, такипочастоте; частотные характеристики зависятот амплитудывходногосигнала; условияустойчивости зависят от величины внешнего воздействия; всистеме существуют собственные особые движения, называемые автоколебаниями.
АПочему частотные характеристики нелинейных систем зависят от амплитуды входного сигнала? В Сколько состояний равновесия имеет нелинейная система?
С Что такое автоколебания?
3При исследовании нелинейных систем очень часто их нелинейные характеристики заменяют приближенными линейными зависимостями, в этом случае говорят, что проводят линеаризацию нелинейной системы. Полученная система называется линеаризованной. Наиболее распространенными методами линеаризации являются: для слабых нелинейностей – разложение в ряд Тейлора, для сильных нелинейностей – гармоническая линеаризация, для релейных систем – вибрационная линеаризация.
АЧто означает слабая нелинейность и почему для нее используется разложение в ряд Тейлора?
ВКаким требованиям должна отвечать нелинейная система, чтобы к ней можно было применять гармоническую линеаризацию?
С Какие характеристики нелинейных систем вводятся в рассмотрение в результате проведения гармонической линеаризации?
10.5 Тест
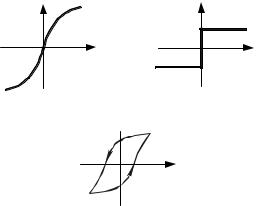
1 Какая из статических характеристик нелинейного элемента является неоднозначной?
|
yнэ |
yнэ |
|
|
|
b |
|
А |
x |
В |
x |
|
–b |
yнэ
f2
С x f1
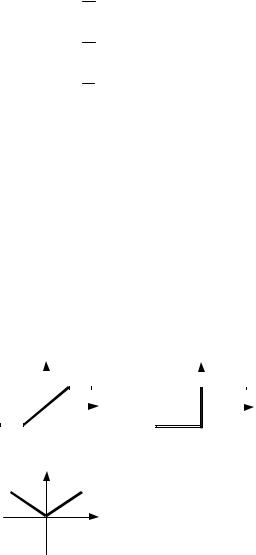
2 Какой сигнал будет на выходе нелинейного элемента с зоной нечувствительности?


























6 Эквивалентная фазочастотная характеристика нелинейного элемента определяется как
А ϕнэ(А) = arctg b1 a1
B ϕнэ(А) = arctg a1 b1
C ϕнэ(А) = arctg cA1 .
7 Вибрационная линеаризация осуществляется путем создания высокочастотных колебаний
А На входе нелинейной системы.
В На входе и выходе нелинейной системы.
С На выходе нелинейной системы.
8 Какой из нелинейных элементов, характеризуемый статической характеристикой, является частотопреобразующим?
|
|
|
yнэ |
|
|
|
|
|
|
yнэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
А |
|
a |
|
|
|
|
В |
b |
|
|
|
|
||
|
|
|
x |
|
|
x |
||||||||
|
|
|
|
|
|
|||||||||
|
–a |
|
|
–b |
|
|||||||||
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yнэ |
С |
x |
9 |
Какое разложение называется разложением в ряд Тейлора функции yнэ = f (x) ? |
||||||||
А |
yнэ = f (x0 ) + |
f ′(x0 ) |
∆x + |
f ′′(x0 ) |
(∆x)2 +... . |
||||
1! |
|
2! |
|
||||||
|
|
|
|
|
|
|
|
||
В |
yнэ = f (x0 ) + |
|
f '(x0 ) |
|
∆x + |
|
f ''(x0 ) |
|
∆x +... . |
|
1! |
|
2! |
||||||
|
|
|
|
|
|
|
|
||
С |
yнэ = f (x0 ) + f ′(x0 )∆x + f ′′(x0 )(∆x)2 + ... . |
||||||||
10 Для каких нелинейных элементов при их линеаризации применяют вибрационную линеаризацию?
А Частотопреобразующих элементов.
В Релейных элементов.
Если рассматривать те же самые начальные условия, но для случая, представленного на рис. 11.2, б, то говорят, что система устойчива "в малом" (особая точка – устойчивый фокус), неустойчива "в большом", режим автоколебаний неустойчивый.
y2 |
а) неустойчи- y2 |
б) |
|
вый |
|
|
y1 |
y1 |
устойчивый
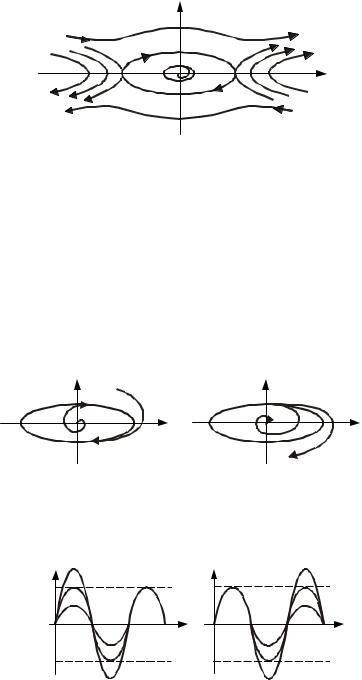
Рис. 11.4 Фазовый портрет системы:
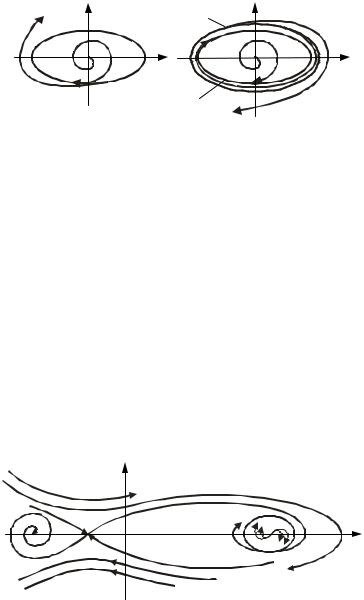
а – полуустойчивый предельный цикл; б – с двумя предельными циклами
Если начальные условия таковы, что одна фазовая траектория "наматывается" на предельный цикл, а другая – "сматывается", то система является неустойчивой и "в малом", и "в большом". В этом случае предельный цикл и соответственно режим автоколебаний называется полуустойчивым (рис. 11.4, а). Система может иметь не один, а несколько предельных циклов. Система, фазовый портрет которой изображен на рис. 11.4, б, имеет два предельных цикла, один из них – внутренний устойчивый, другой – внешний неустойчивый. Состояние равновесия одно и неустойчивое.
Другим видом особых линий, которые встречаются в нелинейных системах, являются сепаратрисы
– кривые, разделяющие области фазового портрета с различным характером фазовых траекторий. Так, в линейных системах второго порядка при рассмотрении фазового портрета типа седло асимптоты гипер-
бол y |
2 |
= ±ωy , ω2 = a |
0 |
/ a |
2 |
, |
a = 0 и являются как раз сепаратрисами. |
|||
|
1 |
|
|
1 |
|
|
|
|||
Типичный фазовый портрет нелинейной системы изображен на рис. 11.5. Здесь имеются следую- |
||||||||||
щие особые точки: точка А – устойчивый фокус, точка В – неустойчивый узел и точка С – седло. В со- |
||||||||||
ответствии с этим сепаратрисы разделяют фазовый портрет на четыре области: 1 – затухающих колеба- |
||||||||||
ний, 2 – автоколебаний, 3 и 4 – неустойчивых апериодических процессов. |
||||||||||
|
|
|
|
|
|
|
|
y2 |
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
1 |
C |
2 |
B |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
A |
|
y1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
Рис. 11.5 Фазовый портрет нелинейной системы |
|||
Нелинейные системы с элементами, имеющими зону нечувствительности или сухое трение, имеют |
||||||||||
не один стационарный режим, а целую область, что на фазовой плоскости выражается "вытягиванием" |
||||||||||
особой точки в особую линию (рис. 11.6). |
|
|
||||||||
В заключение следует сказать, что если известен фазовый портрет, то о системе известно все. |
||||||||||
11.3 Методы построения фазовых портретов
Для построения фазовых портретов нелинейных систем используется ряд методов. Наибольшее распространение получили нижеследующие методы.
11.3.1ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ ФАЗОВЫХ ТРАЕКТОРИЙ
Влинейных системах интегрирование дифференциального уравнения фазовых траекторий (11.3) не представляет трудностей. Для нелинейных систем эта задача существенно усложняется. Аналитическое решение в большинстве случаев получить не удается, поэтому для построения фазовых портретов нелинейных систем применяют численное интегрирование уравнения (11.3). В ряде случаев предварительно проводят качественное исследование изучаемой системы. Благодаря использованию методов качест-
