

ЛЕКЦИЯ_1 / Основы теории автоматического управления - УП - Лазарева-Мартемьянов - 2004 - 352
.pdf
|
|
|
ФЧХ |
|
|
ϕ(ω) = |
π |
. |
(5.103) |
|||||
|
|
|
|
2 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
а) |
ϕ |
|
б) |
Im |
|
|
|
|
в) |
|||
|
|
|
π/2 |
|
|
ω→0 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
0 |
|
|
ω→∞ |
|
|
|
|
|
|
|
0 |
|
ω |
ω |
0 |
|
|
|
|
Re |
||||
|
|
|
|
|||||||||||
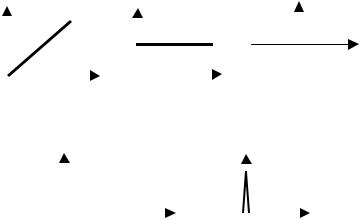
Рис. 5.54 Частотные характеристики И-закона регулирования:
а – АЧХ; б – ФЧХ; в – АФХ
∆y |
|
а) |
|
|
|
∆y |
|
|
б) |
||||
|
|
||||||||||||
1 |
|
|
|
|
|
|
|
|
|
t |
|||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||
0 |
|
t |
0 |
|
|
||||||||
-h |
|
|
|
-w |
|
|
|
|
|
||||
|
|
|
|
|
|
s0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
t |
|
0 |
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 5.55 Переходные характеристики И-закона регулирования:
а – переходная функция; б – весовая функция
Переходные характеристики, графики которых представлены на рис. 5.55:
– переходная функция
h(t) = – S0t; |
(5.104) |
– весовая функция |
|
w(t) = – S0 |
(5.105) |
Переходной процесс в ACP с И-регулятором, изображенный на рис. 5.56, характеризуется отсутствием статической ошибки регулирования, наибольшим значением отклонения регулируемой величины от
y |
yзад |
t |
Рис. 5.56 Переходный процесс в АРС с И-регулятором УСТАНОВИВШЕГОСЯ ЗНАЧЕНИЯ ПО СРАВНЕНИЮ С ДРУГИМИ ЗАКОНАМИ РЕГУЛИ-
РОВАНИЯ, НАИБОЛЬШИМ ВРЕМЕНЕМ РЕГУЛИРОВАНИЯ.
Главным достоинством интегрального регулятора является отсутствие статической ошибки регулирования. Действительно:
lim y(t) = lim sy(s) = lim s |
1 |
Wоб(s) |
|
= 0 . |
||||
|
|
|||||||
t →0 |
s→0 |
s→0 |
s 1+W |
(s) |
S0 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
об |
|
s |
|
|
|
|
|
|
|
|
|
|
|
5.4.3 ДИФФЕРЕНЦИАЛЬНЫЙ ЗАКОН РЕГУЛИРОВАНИЯ
Дифференциальный закон регулирования описывается уравнением
xр(t) = −S2∆y′(t) , |
(5.106) |
где S2 – параметр настройки, которое является уравнением идеального дифференцирующего звена. На практике дифференциальный закон может быть реализован лишь приближенно в определенном интервале частот. Дифференциальная составляющая вводится в закон регулирования для того, чтобы увеличить быстродействие регулятора, так как в этом случае регулятор реагирует не на абсолютное значение регулируемой величины, а на скорость ее изменения. Дифференциальный регулятор не применяется для регулирования, так как при любом постоянном значении регулируемой величины выходной сигнал такого регулятора равен нулю.
Динамические характеристики Д-закона регулирования:
– передаточная функция
W (s) = −S2s ; |
(5.107) |
– частотные характеристики, изображенные на рис. 5.57:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W (iω) = −S2iω = S2ωei |
3π |
|
||||||||
|
|
|
|
|
|
|
АФХ |
|
2 |
; |
(5.108) |
||||||||||||||||
АЧХ |
|
M (ω) = S2ω ; |
|
(5.109) |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
ФЧХ |
|
|
ϕ(ω) = |
3π |
. |
|
|
|
(5.110) |
||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|||||
M |
|
|
|
а) |
|
ϕ |
|
|
|
|
|
б) |
|
Im |
|
|
|
в) |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
3π |
|
|
|
|
|
|
|
|
|
|
|
ω= 0 |
|
|
|
|
|||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
0 |
|
|
Re |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
|
|
|
|
|
|
|
|
|
||
|
0 |
|
|
|
|
ω |
|
|
0 |
|
|
|
|
|
|
|
|
|
ω→∞ |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Рис. 5.57 Частотные характеристики Д-закона регулирования: |
|
||||||||||||||||||||||||||
|
|
|
|
|
а – АЧХ; б – ФЧХ; в –АФХ |
|
|
|
|
||||||||||||||||||
|
|
|
∆y |
|
|
|
|
|
|
а) |
–h |
|
б) |
|
|
|
|
||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s2 δ(t) |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
0 |
|
|
|
|
|
|
|
|
|
t |
|
0 |
|
|
t |
|
|
|
|
||||||
Рис. 5.58 Переходная функция Д-закона регулирования:
а – единичное воздействие, б – переходная функция
Переходные характеристики:
– переходная функция
h(t) = – S2 δ(t); |
(5.111) |
– весовая функция
w(t) = – S2δ′(t), |
(5.112) |
графики которых изображены на рис. 5.58.
ДИФФЕРЕНЦИАЛЬНАЯ СОСТАВЛЯЮЩАЯ УЧАСТВУЕТ ТОЛЬКО В СЛОЖНЫХ ЗАКОНАХ РЕГУЛИРОВАНИЯ ДЛЯ УЛУЧШЕНИЯ КАЧЕСТВА ПЕРЕХОДНОГО ПРОЦЕССА.

5.4.4 ПРОПОРЦИОНАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ ЗАКОН РЕГУЛИРОВАНИЯ
Пропорционально-дифференциальный закон регулирования опи-сывается уравнением
x |
p |
(t) = −[S ∆y(t) + S |
2 |
∆y′(t)] . |
(5.113) |
|
1 |
|
|
ЭТОТ РЕГУЛЯТОР ПО СУЩЕСТВУ СОСТОИТ ИЗ ДВУХ ПАРАЛЛЕЛЬНО ВКЛЮЧЕННЫХ СОСТАВЛЯЮЩИХ: ПРОПОРЦИОНАЛЬНОЙ И ДИФФЕРЕНЦИРУЮЩЕЙ.
Динамические характеристики ПД-регулятора:
– передаточная функция
W (s) = −(S1 + S2 s) ; |
(5.114) |
– частотные характеристики, графики которых изображены на рис. 5.59:
АФХ W (iω) = −(S + S |
2 |
iω) = |
S 2 |
+ S 2 |
ω2 |
ei(π+arctg(S2ω/ S1)); (5.115) |
1 |
|
1 |
2 |
|
|
АЧХ |
M (ω) = S12 + S22ω2 ; |
(5.116) |
ФЧХ |
|
ϕ(ω) = arctg(S2ω/ S1) + π. |
|
|
|
(5.117) |
|||||||||
–M |
|
|
а) ϕ |
б) |
W(i ω) |
Im |
|
в) |
|||||||
|
|||||||||||||||
|
|
|
|
|
|
3π |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
– s1 |
|
|
|
||||
s1 |
|
|
2 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
π |
|
|
ω=0 |
|
0 |
Re |
||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
ω |
|
|
|
ω→∞ |
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
0 |
ω |
|
|
|
|
||||||
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|||||||
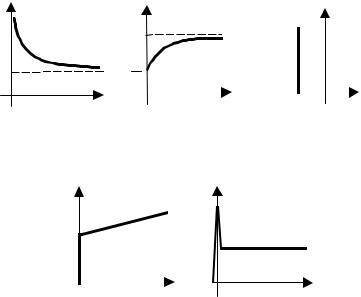
Рис. 5.59 Частотные характеристики ПД-регулятора:
а – АЧХ; б – ФЧХ; в – АФХ Переходная функция, график которой изображен на рис. 5.60:
h(t) = S11(t) – S2δ(t). |
(5.117') |
Весовая функция:
w(t) = −S1δ(t) − S2δ′(t) . |
(5.118) |

С точки зрения качества процесса регулирования в замкнутой АСР пропорционально-дифферен- циальный регулятор обладает особенностями обоих законов регулирования (рис. 5.61). Наличие воздействия по производной от ∆y(t) увеличивает быстродействие регулятора, благодаря чему уменьшается динамическая ошибка по сравнению с пропорциональным регулятором.
y |
П |
|
|
yуст |
ПД |
|
|
yзад |
|
0 |
t |
Рис. 5.61 Переходный процесс в АСР с ПД-регулятором
В установившихся режимах, когда ∆y' = 0, регулятор ведет себя как обычный П-регулятор. Величина статической ошибки остается такой же, как и в случае применения П-регулятора, действительно:
lim y(t) = limsy(s) = lims |
1 |
Wоб(s) |
= |
Kоб |
|
(5.119) |
|||
s 1+Wоб(s)(S1 + S2s) |
KобS1 +1 |
||||||||
t→∞ |
s→0 |
s→0 |
|
|
|||||
5.4.5 ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ ЗАКОН РЕГУЛИРОВАНИЯ
Пропорционально-интегральный закон регулирования описывается уравнением
t |
(5.120) |
xp (t ) = −(S1∆y(t ) + S 0 ∫∆y(τ)dτ) |
|
0 |
|
и представляет собой параллельное соединение пропорциональной и интегральной составляющих. Динамические характеристики ПИ-регу-лятора:
– передаточная функция
|
|
S |
0 |
|
|
|
|
W(s) = S1 |
+ |
|
|
; |
(5.121) |
||
s |
|||||||
|
|
|
|
|
|||
– частотные характеристики (рис. 5.62):
|
|
|
S |
0 |
|
|
|
АФХ |
W(iw) = S1 |
+ |
|
|
; |
(5.122) |
|
|
|
||||||
|
|
|
iω |
|
|
||
АЧХ |
M(w)= |
S12ω2 + S02 |
; |
(5.123) |
|
|
ω |
|
|
|
|
π |
|
S1ω |
|
|
|
ФЧХ |
ϕ(ω) = |
+ arctg |
. |
(5.124) |
|||
|
|
||||||
|
2 |
|
S0 |
|
|
||
|
|
|
|
||||
Переходная функция (рис. 5.63, а):
h(t) = (S1 1(t) + S0 t). |
(5.125) |
Весовая функция (рис. 5.63, б):
w(t) = (S1δ(t) + S0). |
(5.126) |
M |
а) |
s1 |
ω |
|
|
0 |
|
ϕ |
б) |
Im |
в) |
|
|
|
|
π |
|
ω→ 0 |
W(i ω) |
π |
|
|
|
|
|
|
2ω→∞
0 |
ω |
– s1 0 |
Re |
Рис. 5.62 Частотные характеристики ПИ-регулятора:
а – АЧХ; б – ФЧХ; в – АФХ
–h |
а) –w |
б) |
s1
s0
0 |
|
|
t |
|
|
t |
|
|
0 |
||||
|
||||||
Рис. 5.63 Переходные характеристики:
а – переходная функция; б – весовая функция
Пропорционально-интегральный регулятор сочетает в себе достоинства П- и И-законов регулирования, а именно: пропорциональная составляющая обеспечивает достаточное быстродействие регулятора, а интегральная составляющая ликвидирует статическую ошибку регулирования. Переходный процесс в АСР с ПИ-регулятором изображен на рис. 5.64.
В начале процесса регулирования основную роль играет пропорциональная составляющая, так как интегральная составляющая зависит не только от абсолютного значения, но и от времени. С увеличением времени возрастает роль интегральной составляющей, обеспечивающей устранение статической ошибки, т.е.
|
lim y(t) = lim sy(s) = lim s |
1 |
|
Wоб(s) |
|
= |
||
|
s |
1+Wоб(s)(S1 + S0 |
/ s) |
|||||
|
t →∞ |
s→0 |
s→0 |
(5.127) |
||||
|
|
|
sWоб(s) |
|
|
|||
|
|
= lim |
= 0. |
|
|
|||
|
|
s +Wоб(s)S1s + S0 |
|
|
||||
|
|
s→0 |
|
|
|
|||
Подбором параметров настройки S0 и S1 можно изменять удель-ный вес каждой составляющей. В |
||||||||
частности, при S0 = 0 получается |
П-регулятор, а при S1 = 0 – И-регулятор. |
|
|
|||||
y
|
|
И |
|
|
П |
|
|
ПИ |
0 |
|
t |
|
Рис. 5.64 Переходный процесс в АСР с ПИ-, П- и И-регуляторами
5.4.6 ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ ЗАКОН РЕГУЛИРОВАНИЯ
Пропорционально-интегрально-дифференциальный закон регулирования описывается уравнением
|
|
|
t |
|
|
|
|
|
|
|
||||
|
xp (t) = −(S1∆y(t) + S0 ∫∆y(τ)dτ + S2∆y′(t)) . |
(5.128) |
||||||||||||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
Динамические характеристики ПИД-регулятора: |
|
|||||||||||||
передаточная функция |
|
|
S0 |
|
|
|
|
|
|
|
|
|
||
|
W(s) = – (S1 + |
|
|
+ S2s). |
|
|
(5.129) |
|||||||
|
s |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||
частотные характеристики (рис. 5.65): |
|
|
|
|||||||||||
– АФХ |
W(iw) = –(S1+ |
S0 |
|
+ S2s); |
(5.130) |
|||||||||
iω |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||
– АЧХ |
M (ω) = |
S 2ω2 + (S |
|
|
− S |
ω2 )2 |
(5.131) |
|||||||
1 |
|
|
|
|
0 |
2 |
; |
|||||||
|
|
|
|
|
|
|
ω |
|
|
|
|
|||
– ФЧХ |
ϕ(ω) = |
π |
|
|
|
S ω |
|
|
(5.132) |
|||||
|
+ arctg |
|
|
|
1 |
|
. |
|||||||
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
||
|
|
|
S0 − S2ω |
|
|
|
||||||||
Переходные характеристики: переходная функция, при t > 0
весовая функция |
|
|
|
|
|
|
h(t) = –(S1 + S0t + S2 d(t)); |
(5.133) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
w(t) = –(S1 d (t) + S0 |
+ S2 d'(t)). |
|
|
(5.134) |
|
|
||||||||
M |
|
|
а) |
ϕ |
|
б) ω→0 |
|
Im |
в) |
|
||||
|
|
|
|
|
||||||||||
|
|
|
|
|||||||||||
|
|
|
|
3π/ 2 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
s1 |
|
|
|
|
π/ 2 |
|
|
– s1 |
|
0 |
Re |
|
||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s2 |
|
ω |
|
|
|
ω |
|
|
|
|
|
0 |
0 |
|
ω→∞ |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
s0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
РИС. 5.65 ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ПИД-РЕГУЛЯТОРА: |
|
|||||||||||||
А – АЧХ; Б – ФЧХ; В – АФХ
График переходной функции ПИД-регулятора представлен на рис. 5.66.

– h
s1
0 t
Рис. 5.66 Переходная функция ПИД-регулятора
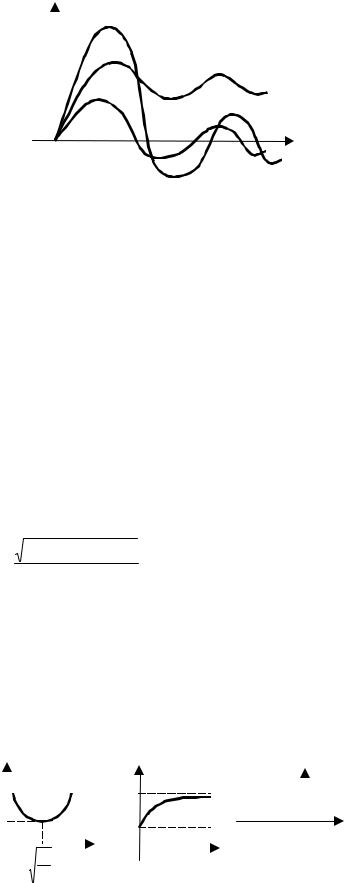
ПИД-регулятор сочетает в себе достоинства всех трех простейших законов регулирования: высокое быстродействие благодаря наличию импульса по производной от ∆y(t) и отсутствие статической ошибки, которое обеспечивает интегральная составляющая (рис. 5.67).
y И
И
П
ПД
ПИ
ПИД
0 |
t |
РИС. 5.67 ПЕРЕХОДНЫЕ ПРОЦЕССЫ В АСР С РАЗЛИЧНЫМИ ЗАКОНАМИ РЕГУЛИРОВАНИЯ
Необходимо отметить, что применение регуляторов с дифференциальными составляющими, несмотря на их достоинства, не всегда целесообразно, а иногда и недопустимо. Так, для объектов с большим запаздыванием по каналу регулирования бесполезно вводить воздействие по производной от регулируемой величины, так как этот импульс будет поступать в регулятор по истечении времени чистого запаздывания после прихода возмущения, за которое в объекте могут накопиться большие отклонения. Более того, в таких случаях ПДили ПИД-регулятор может "раскачать" объект и система потеряет устойчивость.
5.5 Тренировочные задания
1 Звеньями называются отдельные элементы системы, в которых происходит преобразование входных сигналов в выходные. Если передаточная функция звена имеет вид простой дроби, то такое звено относится к группе типовых или элементарных звеньев, уравнения которых можно получить из дифференциального уравнения
a2 y′′(t) + a1 y′(t) + a0 y(t) = b1 x′(t) + b0 x(t) ,
приравнивая те или иные коэффициенты нулю.
Различают следующие звенья: усилительное, интегральное, идеальное и реальное дифференцирующие, чистого запаздывания, апериодическое первого порядка, апериодическое второго порядка, колебательное. Каждое из перечисленных звеньев рассматривается с позиций анализа их динамических характеристик.
А Какие звенья описываются обыкновенными дифференциальными уравнениями? В Почему идеальное дифференцирующее звено физически не реализуемо?
С На какие группы делятся типовые звенья?

2 При анализе и синтезе систем автоматического управления широко используется структурный анализ. В любой структурной схеме могут присутствовать только три типа соединений: последовательное, параллельное, соединение с обратной связью. Значение передаточных функций отдельных звеньев позволяет записать передаточные функции соединений и построить их частотные характеристики.
Реальные объекты обладают сложной структурой, в них имеются, так называемые, перекрестные связи, которые необходимо развязать, используя правила преобразования структурных схем.
АКакие передаточные функции можно записать для одноконтурной системы автоматического регулирования?
ВЗаданы передаточные функции звеньев W1(s) = k; W2 (s) = 4Ts1 . Записать частотные характеристики последовательного и параллельного соединений.
СПеренос каких элементов при преобразовании схем производится без дополнительных преобразований?
3 Элементами одноконтурной системы автоматического регулирования являются объект и регулятор. Все законы регулирования подразделяются на простейшие: пропорциональный, дифференциальный, интегральный и промышленные: пропорционально-интегральный, пропорциональнодифференциальный, пропорционально-интегрально-диф-ференциальный. Все законы регулирования рассматриваются с точки зрения их динамических свойств.
А |
Какой из законов регулирования физически не реализуется? |
|
|
|||
В |
Что дает введение в закон регулирования дифференциальной составляющей? |
|
|
|||
С Передаточные |
функции |
регуляторов |
записываются |
со |
знаком |
|
|
"–". Какую информацию дает этот знак? |
|
|
|
||
5.6 Тест
1Какие звенья относятся к группе статических звеньев? А Статическая характеристика отлична от нуля.
В Статическая характеристика не существует. С Статическая характеристика равна нулю.
2Передаточная функция какого звена имеет вид W (s) = T1s ?
А Усилительного.
В Реального дифференцирующего. С Интегрального.
3Передаточная функция апериодического звена первогопорядка…
А W (s) = TsKs+1 . В W (s) = K + Ts1 . С W (s) = TsK+1 .
4Кривая разгона какого звена имеет вид?
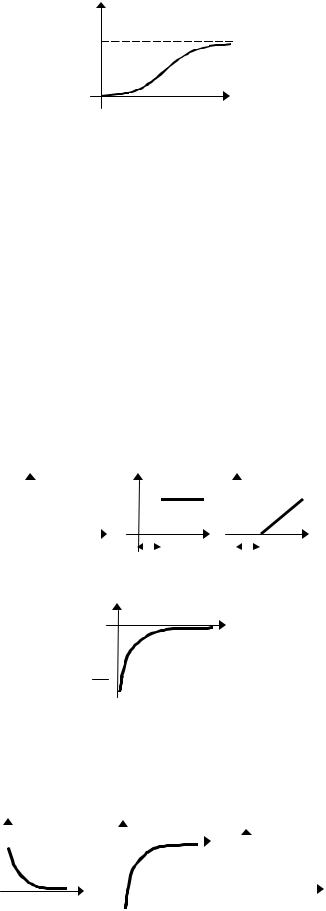
h |
|
0 |
t |
|
А Усилительного.
В Апериодического первого порядка. С Апериодического второго порядка.
5 Какое звено описывается уравнением T y'(t) + y(t) = k x'(t) ?
А Апериодическое первого порядка. В Идеальное дифференцирующее. С Реальное дифференцирующее.
6 Каким уравнением описывается колебательное звено?
А T y'(t) + y(t) = k x(t) .
В T1T2 y′′(t) + (T1 +T2 )y′(t) + y(t) = k x(t) . С Tk2 y′′(t) +Tд y′(t) + y(t) = k x(t) .
7 Какую кривую разгона имеет звено чистого запаздывания?
h |
|
А |
h |
В |
h |
|
|
|
|
|
С |
||||
|
|
||||||||||||||
k |
|
|
|
0 |
|
|
|
|
0 |
|
|
τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
0 |
|
t |
|
τ |
|
t |
|
|
t |
||||||
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
8 Какое звено имеет весовую функцию?
w
t
− TK2
А Апериодическое первого порядка. В Реальное дифференцирующее. С Интегральное.
9 Какую весовуюфункцию имеет апериодическое звено первого порядка?
w |
|
А |
|
w |
|
В |
w |
|
С |
||||||
|
|
|
|
||||||||||||
|
|
||||||||||||||
K |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
0 |
|
t |
|
|
|
|||||||
T |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
T |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
K |
|
|
|
|
|
|
|
|
|
|
0 |
|
t |
− |
|
|
|
0 |
|
t |
||||||
|
|
|
|
||||||||||||
T 2 |
|
|
|
||||||||||||
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
10 Какое звено имеет изображенную ниже АФХ?

i Im(ω)
k
0 Re(ω)
А Усилительное. В Интегральное. С Колебательное.
11 Какая АФХ соответствует звену чистого запаздывания?
|
i Im(ω) |
А |
i Im( |
ω |
В |
i Im(ω) |
|
С |
|
|
|
) |
|
||||
|
|
|
0 |
|
Re(ω) |
0 |
|
Re(ω) |
0 |
|
Re(ω) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 Какое звено с соответствующей передаточной функцией относится к группе особых звеньев?
А W (s) = |
k |
|
. |
||
Ts +1 |
|||||
|
|
|
|||
В W (s) = |
k |
|
. |
||
Ts −1 |
|||||
|
|
|
|||
С W (s) = |
|
ks |
|
. |
|
|
Ts +1 |
||||
|
|
|
|||
13 Какое соединение называется параллельным?
А |
|
В |
W1 |
– |
W1 |
|
|
|
W2 |
|
W2 |
С
W1  W2
W2
W3
14 В каком варианте правильно осуществлен перенос узла через звено?
|
|
|
|
|
x |
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W(s) |
|
|
|
|
|
|
||||
|
|
|
А |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
x |
|
|
|
|
|
|
В |
x |
|
|
|
С |
|||
|
|
|
|
|
|
|
|
|
|
|
||||||||
W(s) |
|
y |
|
|
W(s) |
|
|
y |
W(s) |
|
y |
|||||||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
1/W(s) |
|
|
|
|
W(s) |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
15 Какой закон регулирования имеет пропорциональный регулятор?