ЛЕКЦИЯ_1 / Основы теории автоматического управления - УП - Лазарева-Мартемьянов - 2004 - 352
.pdf

Большие возможности для исследования устойчивости и даже качества нелинейных систем открыва- |
|||||||
ет предложенный в 1960 году румынским ученым Пóповым критерий абсолютной устойчивости, |
|||||||
особенно его геометрическая трактовка, позволяющая привлечь к исследованию рассматриваемого |
|||||||
класса нелинейных систем частотные методы. |
|
|
|
||||
Рассматривается нелинейная система, на которую действует конечного вида произвольное воздей- |
|||||||
ствие f (t) , ограниченное лишь тем, что оно считается исчезающим, т.е. lim f (t) = 0 (рис. 12.7). |
|||||||
|
|
|
|
|
|
t →∞ |
|
Пусть линейная часть системы описывается передаточной функцией W (s) , а во временной области – |
|||||||
весовой функцией w(t) , нелинейный элемент характеризуется статической характеристикой y(t) = Φ[x(t)]. |
|||||||
|
|
f(t) |
x |
НЭ |
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
- z(t) |
W(s) |
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 12.7 Нелинейная система с исчезающим воздействием |
|
|||||
Вся нелинейная система в интегральной форме описывается уравнением |
|
||||||
|
|
t |
|
|
|
|
|
x(t) = f (t) − z(t) = f (t) − ∫w(t − τ)Φ[x(τ)]dτ, |
(12.47) |
|
|||||
|
|
0 |
|
|
|
|
|
изображение по Лапласу которого x(s) = f (s) −W (s)L{Φ[x(t)]}. |
|
||||||
Состояние равновесия x = 0 |
будет устойчивым по Ляпунову, если для любого сколь угодно малого |
||||||
положительного ε существует другое положительное η(ε) |
такое, что при sup f (t) = η0 , η0 < η имеет ме- |
||||||
сто неравенство x(t) ≤ ε . Если η неограниченно, имеет место устойчивость в целом. |
|
||||||
Абсолютной |
устойчивостью равновесия называется устойчивость в целом, |
имеющая место для |
|||||
всех характеристик Φ(x) , принадлежащих к определенному классу. |
|
||||||
Будем рассматривать устойчивость для характеристик Φ(x) , лежащих в углу α, |
т.е. принадлежащих |
||||||
подклассу (0, k) (рис. 12.8). |
|
|
|
|
|
|
|
Если равновесие абсолютно устойчиво, то оно абсолютно устойчиво и для всех прямолинейных ха- |
|||||||
рактеристик y = hx , где 0 ≤ h ≤ k, |
поскольку эти прямые относятся к данному подклассу. |
||||||
Исходная нелинейная система (рис. 12.7) представляет собой по своей структуре замкнутую систе- |
|||||||
|
|
|
|
му, в которой нелинейный элемент охвачен отрицательной |
|||
|
y |
y = k x |
|
обратной связью с линейным звеном W (s) . Если провести ли- |
|||
|
|
α = arctgk |
|
неаризацию нелинейной характеристики Φ(x(t)) , то получен- |
|||
|
|
|
ную уже замкнутую линейную систему можно исследоватьна |
||||
|
|
|
|
устойчивостьспомощьючастотногокритерияНайквиста. |
|||
|
0 |
x |
|
Рассмотрим основной случай, когда линейная часть |
|||
|
|
|
|
системы устойчива, т.е. ее характеристическое уравнение |
|||
|
|
|
|
не имеет правых корней или тоже самое, что W (s) не имеет |
|||
|
|
|
|
правых полюсов и тогда годограф вектора разомкнутой |
|||
Рис. 12.8 Класс нелинейных |
|
системы линеаризованной характеристики hW (iω) не пере- |
|||||
|
секает отрезка (−∞, −1) действительной оси. В соответствии |
||||||
характеристик |
|
с критерием Найквиста этого условия достаточно, чтобы |
|||||
замкнутая линейная система была устойчива. Так как 0 ≤ h ≤ k , то достаточным условием устойчивости |
|||||||
всех линейных систем из подкласса (0, k) |
будет условие, |
чтобы W (iω) не пересекала отрезка действи- |
|||||
тельной оси (−∞, −1/ k) . |
|
|
|
|
|
|
|
Можно показать, что это условие необходимо и достаточно. Действительно, пусть линейная часть |
|||||||
устойчива, но W (iω) пересекает четное число раз отрезок (−∞, −1/ k) . Изменяя h в пределах от 0 до k , |
|||||||
тем самым перемещается правая граница критического отрезка, причем значению h = 0 соответствует |
|||||||
точка −∞ , а h = k |
– −1/ k . Всегда можно выбрать h |
внутри заданных границ так, чтобы правая граница |
|||||
критического отрезка попала в любую точку отрезка (−∞, −1/ k) . |
|
||||||
Если характеристика W (iω) пересекает четное число раз отрезок (−∞, −1/ k) , то выберется значение h
так, чтобы число пересечений стало на единицу меньше, но тогда замкнутая система становится неустойчивой. Таким образом, чтобы замкнутая система оставалась устойчивой при любых h , заключенных в пределах 0 ≤ h ≤ k , необходимо и достаточно, чтобы нигде не пересекала отрезок (−∞, −1/ k) оси
абсцисс.
Для произвольной нелинейной функции из подкласса (0,k) достаточное условие абсолютной устой-
чивости было сформулировано Поповым и выглядит следующим образом.
Для того, чтобы положение равновесия нелинейной системы с устойчивой линейной частью было устойчиво, достаточно выполнение следующих условий:
1 Существует такое действительное число α , при котором действительная часть функции Попова П(iω) была положительна
Re П(iω)= Re[(1+ iαω)W (iω)+1/ k]> 0. |
(12.48) |
2 Функция Φ(x) принадлежит подклассу (0,k) , т.е. 0 ≤ Φ(x) / x ≤ k .
Доказательство этой теоремы не приводится, но рассматривается геометрическая трактовка. Для этого вводятся следующие характеристики видоизмененной частотной характеристики линейной части W *(iω), связанной с исходной W (iω) соотношениями:
ReW *(iω)= ReW (iω); |
(12.49) |
|
ImW *(iω)= ωImW (iω), |
||
|
т.е. действительная часть видоизмененной характеристики равна действительной части исходной, а мнимая равна мнимой части исходной, умноженной на ω. Так как ImW (iω)= 0 и ImW *(iω)= 0 одновременно, то точки пересечения действительных характеристик совпадают. Действительная и мнимая части видоизмененной характеристики W *(iω) являются четными функциями ω. Если степень числителя W (iω) не выше степени знаменателя и W (iω) имеет не более одного полюса в начале координат, то при ω→ ∞ ReW *(iω) и ImW *(iω) стремятся к конечным пределам и характеристика W *(iω) лежит в конечной
части плоскости целиком. Пусть
W (iω) = U (ω) + iV (ω);
W *(iω) = U *(ω) + jV *(ω),
тогда
Re[(1+iαω)W (iω) +1/ k]=U (ω) −αωV (ω) +1/ k > 0 (12.50)
или
U *(ω) −αV *(ω) +1/ k > 0.
Критическим случаем является случай, когда
U *(ω) −αV *(ω) +1/ k = 0,
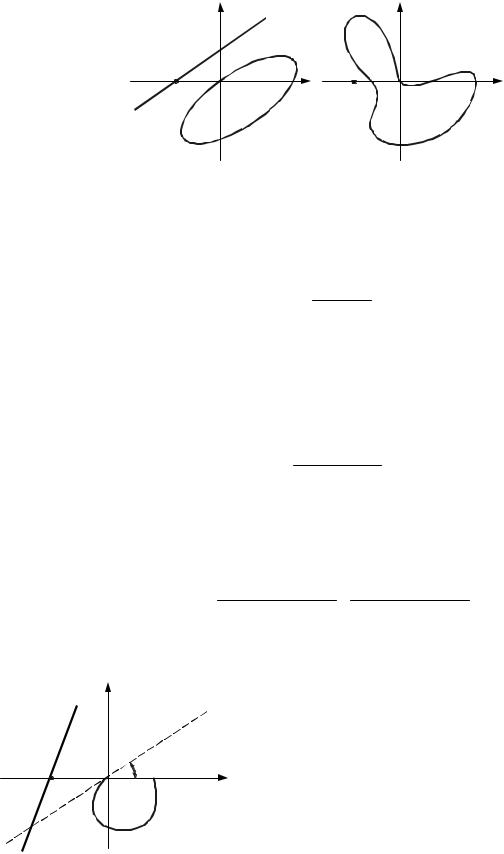
который дает в координатах U *, V * уравнение прямой линии, касающейся характеристики W *(iω). Прямая проходит через точку (−1/ k, iω) и имеет угловой коэффициент 1/ α .
Когда U *(ω) −αV *(ω) +1/ k > 0 , W *(iω) лежит в части плоскости, включающей начало координат, т.е.
правее прямой.
Таким образом, для абсолютной устойчивости равновесия достаточно, чтобы на плоскости видоизмененной частотной характеристики W *(iω) линейной части системы можно было провести прямую че-
рез точку (−1/ k, i0) так, чтобы W *(iω) целиком располагалась справа от этой прямой (рис. 12.9, а).
На рис. 12.9, б приведен случай, когда отделяющую прямую построить нельзя и судить об устойчивости также нельзя.
Критерий Попова распространен также на системы с неустойчивой или нейтральной линейной частью. В этом случае должны выполняться условия
Re(1+ iαω)W1(iω) +1/ k > 0; r < Φ(x)/ x < k + r, (12.53)
сти движения по Ляпунову и асимптотической устойчивости. Кроме того для нелинейных систем существуют такие понятия, как устойчивость в "малом" и устойчивость в "большом".
Для исследования устойчивости в "малом" используется первый метод Ляпунова, который позволяет судить об устойчивости нелинейной системы по линейной системе первого приближения.
А Какое движение называется возмущенным движением и какое движение называется невозмущенным движением?
В Какой смысл имеет понятие устойчивости движения системы по Ляпунову и чем оно отличается от асимптотической устойчивости?
С Какие теоремы были доказаны Ляпуновым в первом методе исследования устойчивости в "малом" состояния равновесия нелинейной системы.
2 Как известно, достаточные условия устойчивости нелинейных систем дает второй метод Ляпунова, позволяющий исследовать устойчивость в "большом". Согласно этому методу в рассмотрение вводится функция V (y1, y2, ..., yn ) , заданная в фазовом пространстве и обладающая следующими свойствами: не-
прерывна со всеми своими частными производными в некоторой открытой области, содержащей начало координат; при y1 = y2 =... = yn = 0 – V (y1, y2 , ..., yn ) = 0; внутри рассматриваемой области V является знако-
определенной функцией, т.е. V > 0 или V < 0 .
А. М. Ляпуновым были сформулированы три теоремы: об устойчивости, об асимптотической устойчивости и о неустойчивости. Так для доказательства асимптотической устойчивости строится и исследуется производная по времени функции Ляпунова, которая в силу системы дифференциальных уравнений, описывающих нелинейную систему, должна быть знакоопределенной функцией противоположного с V знака.
Если найти такую функцию V удастся, то устойчивость нелинейной системы будет доказана, причем устойчивость в "большом". Единого подхода к построению функции V (y1, y2, ..., yn ) не существует,
но имеются рекомендации по составлению этой функции для исследования определенного класса систем.
А Какая теорема физики лежит в основе второго метода Ляпунова?
В Какими свойствами должна обладать функция Ляпунова и ее производная по времени, чтобы нелинейная система была устойчива ?
С Как Вы объясните, что второй метод Ляпунова дает устойчивость нелинейной системы в "большом"?
3 Для исследования устойчивости определенного класса нелинейных систем применяют критерий абсолютной устойчивости. Этот критерий относится к группе частотных критериев устойчивости. Рассматриваемая нелинейная система представляет собой замкнутую систему и состоит из линейной части, характеризуемой амплитудно-фазовой характеристикой W (iω), и нелинейного элемента со статической
характеристикой Φ(x) из подкласса (0,k) , т.е. 0 ≤ Φ(x) / x ≤ k , стоящего в отрицательной обратной связи.
Для устойчивости состояния равновесия нелинейной системы с устойчивой линейной частью достаточно выполнения условия, что действительная часть функций Попова Π(iω) положительна.
А Как Вы понимаете абсолютную устойчивость?
В Что представляет собой видоизмененная амплитудно-фазовая характеристика линейной части, и как последняя связана с исходной?
СДайте геометрическую трактовку критерия абсолютной устойчивости.
12.6Тест
1 Для асимптотической устойчивости необходимо, чтобы при t → ∞
А || y(t) − y* (t) ||< ε. В || y(t) − y* (t) ||> ε. С || y(t) − y*(t) ||→ 0.

2 Если нелинейная система второго порядка описывается системой дифференциальных уравнений первого порядка
dydt1 = P(y1, y2).dy2 = Q(y1, y2),dt
то состояние равновесия определяется решением следующей системы
АP(y1, y2) = 0;Q(y1, y2) = 0.
ВP(y1, y2 ) = const;Q(y1, y2 ) = const.
СP(y1, y2) = ∞;
Q(y1, y2) = ∞.
3 Линеаризованное уравнение первого приближения записывается в виде
А An y(n) (t) + ... + A1y′(t) + A0 y(t) = 0. В An y(n) (t) +... + A1y′(t) + A0 y2 (t) = 0.
С An (y(n) (t))2 +...+ A1(y′(t))2 + A0 y2 (t) = 0.
4 Знакоопределенной функцией является функция вида
А V = y1 + y2 +...+ yn.
В V = y12 + y22 +...+ yn2.
С V = (y12 + y22 ) + (y22 + y32 ) ...+ y42.
5 Функция Ляпунова при y1 = y2 =... = yn = 0 принимает значение
А V (y1, y2, ..., yn )= ∞.
BV (y1, y2, ..., yn )= 0.
CV (y1, y2, ..., yn )= const.
6 В фазовом пространстве функция Ляпунова представляет собой
А Плоскость.
В Многогранник. С Параболоид.
7 Производная от функции Ляпунова по времени в силу системы дифференциальных уравнений, описывающих нелинейную систему