

Выбор типа и сечения кабелей и проводов.
Выбор
кабеля по напряжению, как и в других
электроустановках, сводится к обеспечению
условия:
![]()
Расчет требуемого сечения и выбор кабеля рекомендуется выполнять в следующей последовательности:
а) На схеме генерирования и распределения электроэнергии намечают наиболее характерные участки кабельной сети, подлежащие расчету:
• кабель от генератора до ГРЩ;
• кабель от ГРЩ до одного из распределительных щитов (РЩ);
• кабель от одного из РЩ до отдельного приемника электроэнергии, подключенного к его шинам.
б) По значениям мощности приемников электроэнергии, полученным в таблице расчетных нагрузок ЭС, определяются расчетные токи кабелей судовой сети на участках, указанных в п. а):
• Расчетный ток кабеля, соединяющего генератор с ГРЩ принимается равным номинальному тока генератора.
![]()
• Расчетный ток кабеля, питающий АД.
![]() А
(поз.
6ж)
А
(поз.
6ж)
• Расчетный ток кабеля, питающий РЩ.
• Расчетный ток кабеля, питающий трансформатор.
![]()
Сечение кабеля выбирается по эквивалентному току.
Эквивалентным током для кабелей с резиновой изоляцией считается ток, длительное прохождение которого приводит кабель к такому же износу, как и при кратковременной нагрузке заданным током, а для кабелей с пластмассовой изоляцией (из полиэтилена или полихлорвинила) — ток, длительное прохождение которого вызывает такой же нагрев кабеля что и к концу кратковременного режима:
![]() А
А
Для рассматриваемого механизма выбираем кабель марки КНРП 3х16, который соответствует полученному току.
![]() —коэффициент,
учитывающий уменьшение допустимой
нагрузки кабеля в связи с ухудшением
теплоотдачи при прокладке его в пучке.
Для трехрядных пучков
—коэффициент,
учитывающий уменьшение допустимой
нагрузки кабеля в связи с ухудшением
теплоотдачи при прокладке его в пучке.
Для трехрядных пучков
![]() = 0,6, для двухрядных
= 0,6, для двухрядных![]() = 0,8, для однорядных
= 0,8, для однорядных![]() = 0,9.
= 0,9.
![]() —коэффициент,
зависящий от числа часов работы кабеля
в сутки t3,
—коэффициент,
зависящий от числа часов работы кабеля
в сутки t3,
![]()
К1 — коэффициент, учитывающий отличие температуры окружающей среды от 45°.
К2 — коэффициент, учитывающий ухудшение условий охлаждения кабелей, проложенных в трубе или в кожухе длиной более 2 м (для трубы К2 = 0,8; для кожуха К2 = 0,85).
Из-за сложности выполнения монтажных работ в судовых условиях сечение кабеля не рекомендуется брать более 240 мм Если по расчетному току требуется принять большее сечение, то рекомендуется выбрать несколько кабелей меньшего сечения, проложенных параллельно и способных длительно пропускать расчетный ток. Правда, в этом случае необходимо учитывать пучковость их прокладки.
6,24.Токи короткого замыкания генератора и двигателя постоянного тока
Описывая выше внезапное к. з. в СЭЭС переменного тока, мы рассматривали синхронный генератор как систему трех магнитосвязанных контуров. Генератор постоянного тока также можно представить тремя магнитосвязанными контурами. Один из них — это цепь обмотки якоря и дополнительных полюсов (и обмотки последовательного возбуждения, если таковая имеется). Второй контур — обмотка независимого (или параллельного) возбуждения. Третий — успокоительный контур, эквивалентный по своему демпферному действию множеству тех путей, по которым замыкаются вихревые токи в дополнительных полюсах и других массивных частях машины.
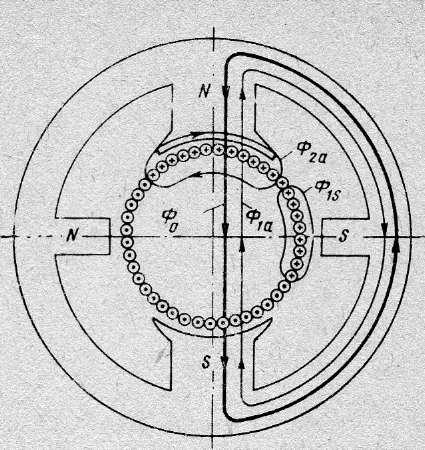
Рис. 10.7. Составляющие магнитного потока машины постоянного тока при к. з. (для одной пары полюсов)
Скачкообразное изменение сопротивления первого из указанных контуров при к. з. вызывает такое одновременное изменение токов во всех трех контурах, что потокосцепления каждого контура в первый момент сохраняются такими, какими они были до к.з. Поэтому здесь, как и в СГ, при к. з. резко возрастает доля потока рассеяния в общем потоке машины.
При коротком замыкании генератора постоянного тока имеет место нарушение коммутации вследствие того, что поток дополнительных полюсов (ДП) возрастает не одновременно с током в обмотке ДП, а с некоторым запаздыванием (вследствие демпферного действия вихревых токов в полюсах). Кроме того, поток ДП возрастает не пропорционально току нагрузки из-за насыщения полюсов. Все это приводит к резкому замедлению процесса коммутации.
При коротком замыкании машины постоянного тока (рис. 10.7), помимо поперечной реакции якоря Ф2а, появляется сильная продольная реакция якоря Ф1а и значительный поток рассеяния в зоне коммутации ф1в. Все эти составляющие потока искажают и уменьшают поток возбуждения машины Ф0, что приводит к уменьшению э. д. с., действующей в цепи якоря. Не остаются постоянными и параметры цепи якоря: активное сопротивление Ra и индуктивность La. Нарушение коммутации (неравномерная плотность тока под щетками, искрение на коллекторе) приводит к резкому увеличению Ra вследствие большого падения напряжения в щеточных контактах (оно достигает при к. з. 30—40% Uн) . Значение индуктивности La уменьшается в переходном процессе в результате вытеснения части магнитного потока в воздушный зазор и насыщения зубцов якоря поперечным полем.
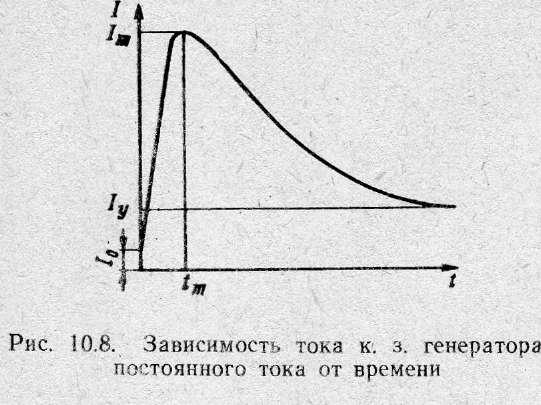
Для определения максимального тока к. з, (рис. 10.8) /m в расчете вместо Ra приходится пользоваться фиктивным сопротивлением генератора
Rф. г = Uн/10Iн, (10.15)
где Uн. Iн — номинальные напряжение и ток генератора.
Ударный ток к. з. генератора можно определить по формуле
Im=Eг/(R ф.г. + R2), (10.16)
где Rs,—суммарное сопротивление элементов внешней цепи генератора при к. з.; Ег — э. д. с. генератора (принимается равной номинальному напряжению генератора).
Заметим, что максимальное значение тока к. з. генератора постоянного тока не зависит от системы его возбуждения, так как магнитный поток генератора определяется не столько способом его возбуждения, сколько постоянством потокосцепления с обмотками возбуждения генератора при возрастающем их потоке рассеяния. Система возбуждения влияет на значение установившегося тока к. з.
Значение установившегося тока к. з. Iу зависит от системы возбуждения (независимое, смешанное или самовозбуждение), а также от действия АРН, если он есть. Значение Iу необходимо только для расчета спадающей ветви кривой Iг(t), так как в практике защитный аппарат разрывает цепь до того, как ток к. з. достигнет своего установившегося значения, которое находится в пределах (0,35-1)Iн и в приближенном расчете может быть принято равным 0,5 Iн.
Время достижения током своего ударного значения tmг составляет 0,03—0,05 с и зависит от соотношения индуктивного и активного сопротивлений цепи якоря генератора. Возрастание тока от нуля до Im идет не по экспоненте, а более резко, и этот участок кривой можно представить прямой линией.
Спадающий участок кривой близок к экспоненте и описывается уравнением
![]()
где TB=La/Rв — постоянная времени обмотки возбуждения генератора.
Индуктивность LB этой цепи велика по сравнению с индуктивностью La. и поэтому уменьшение тока к. з. происходит значительно медленнее, чем | его рост.
Электродвигатели постоянного тока, подключенные к сети, при к.з. переходят в генераторный режим, по скольку они, вращаясь по инерции, имеют э. д. с., превышающую напряжение сети, и подпитывают - место К.З. В приближенном расчете считают, что э. д. с. эквивалентного двигателя ЕД. равна 0,9 UH двигателя.
двигателя Eд равна 0,9 Uн двигателя, а фиктивное сопротивление двигателя с учетом сопротивления внешней цепи до точки к. з. принимают
![]()
где Iэ.д — ток эквивалентного двигателя, равный 0,75 ΣIн.д (ΣIн д — сумма номинальных токов работающих двигателей).
При наличии в системе гребного электродвигателя определяется ток подпитки только от этого двигателя.
ОСОБЕННОСТИ РАСЧЕТА ТОКОВ КОРОТКОГО ЗАМЫКАНИЯ В СЭЭС ПОСТОЯННОГО ТОКА
Расчеты токов к. з. в СЭЭС постоянного тока обычно ведут в физических единицах. Для приближенного расчета токов к. з. в СЭЭС постоянного тока э. д. с. генераторов Ег принимают постоянной и равной номинальному значению напряжения генератора U„ или напряжению сети U(Er ~U).
При к. з. в сети, как уже отмечалось, электродвигатели переходят в генераторный режим, подпитывая место к. з. Противо-э. д. с. двигателей принимают равной номинальному напряжению сети: Ед~U.
Расчет токов к. з. в СЭЭС постоянного тока выполняют в такой последовательности.
Составляют расчетную схему вида, показанного на рис. 10.20, а, в которой должны быть указаны все источники электроэнергии, работающие параллельно, кабельные соединения и коммутационная аппаратура, расчетные токи к. з. На этой схеме могут быть указаны мощности генераторов, эквивалентного двигателя, длины и площади сечения кабелей.
Замкнутые контуры должны быть предварительно преобразованы в радиальные ветви известными из расчета электрических сетей приемами. Обычно вполне достаточным является преобразование «замкнутого треугольника» в «звезду».
На основании расчетной схемы (рис. 10.20, б) для каждой расчетной точки к. з. составляют упрощенную схему замещения, приведенную к простейшему виду (рис. 10.20, в). При этом индуктивные сопротивления кабелей не учитывают.
Значения фиктивных сопротивлений генератора Rф.г. и двигателя Rф.д определяют соответственно по формулам (10.16) и (10.19).
Если расчетная схема СЭЭС содержит несколько параллельно работающих генераторов, то их необходимо привести к одному эквивалентному генератору с напряжением U параллельным сложением сопротивлений всех генераторных ветвей. Здесь необходимо иметь в виду, что все сопротивления в справочниках даны в расчете на один полюс, а поэтому при расчетах токов к. з. в СЭЭС постоянного тока их надо увеличить в 2 раза.
Для определения результирующего сопротивления схемы (см. рис. 10.20, в) сначала складывают последовательно включенные сопротивления Rф.г и R, а затем учитывают параллельно включенное сопротивление Rф.д. К полученному таким образом сопротивлению прибавляют сопротивление RK цепи от шин ГРЩ до точки к. з. В итоге получают результирующее сопротивление
Б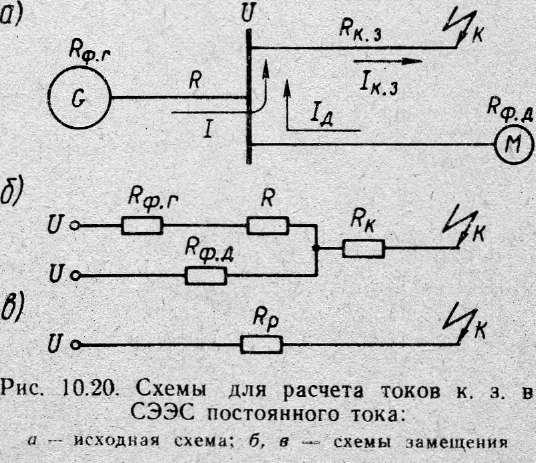 олее
точные результаты расчета можно получить,
если учесть, что э. д. с. источников
электроэнергии и э. д. с. эквивалентного
двигателя неодинаковы.
олее
точные результаты расчета можно получить,
если учесть, что э. д. с. источников
электроэнергии и э. д. с. эквивалентного
двигателя неодинаковы.
В этом случае эквивалентные э. д. с. и сопротивления определяют по формулам:
для двух параллельных ветвей
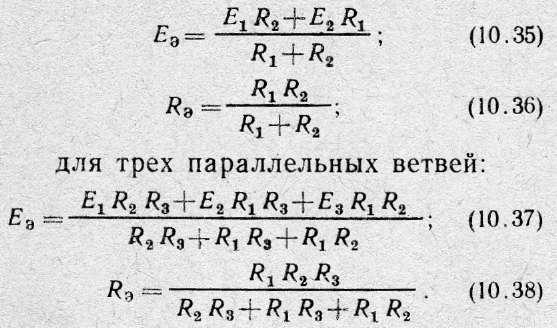
При числе параллельных ветвей больше трех последовательно замещают эквивалентной ветвью сначала три ветви схемы, а затем по этим же формулам полученную эквивалентную ветвь и оставшиеся. Для оценки токоограничивающего действия электрической дуги, возникающей в месте к. з., необходимо принять напряжение в месте к. з. не равным нулю, как это делают при металлических к. з., а равным напряжению (Uд, необходимому для горения электрической дуги в месте к. з., которое на основании опытных данных может быть принято приближенно равным 0,5U при определении максимальных переходных значений токов к. з., и 0,8U при определении установившихся токов к. з. в СЭЭС.
![]()
Максимальный переходный ток в СЭЭС при дуговом к. з.
Если в СЭЭС в качестве источника электроэнергии используется аккуму аккумуляторная батарея, то ударный ток от нее определяется выражением
![]()
где Еа.б — ne1--э. д. с. аккумуляторной батареи (здесьn — количество последовательно соединенных элементов в группе аккумуляторов; — э. д. с. одного аккумулятора). Rа.б= (n/m) (rвн1-rмэ) — сопротивление аккумуляторной батареи (здесь m — число групп аккумуляторов, соединенных параллельно; rвн1 — внутреннее сопротивление одного аккумулятора; rмэ — сопротивление одного межэлементного соединения); Rz — суммарное сопротивление внешней цепи.
Значения е1 и гВН1 не постоянны в эксплуатации, они зависят от многих факторов: температуры электролита, плотности электролита в порах пластин и в баке, срока службы аккумулятора, протекающего по аккумулятору тока и др. При расчете токов к. з. значения е1 гвн1, гмэ находят из соответствующих справочников.
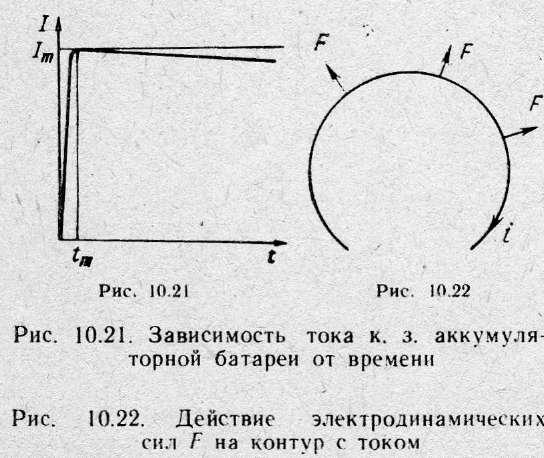
Вследствие того что индуктивность аккумуляторов мала, время увеличения тока к. з. до максимума у них меньше (рис. 10.21), чем при к. з. генератора. По данным опытов tma б = = 0,005-0,01 с.
Н![]() аибольшие
токи к. з. от аккумуляторной батареи
получаются, когда она полностью заряжена.
Из рис. 10.21 видно, что по достижении
максимума ток разряда батареи при ее
к. з. не остается постоянным, а
уменьшается. Это происходит потому, что
концентрация электролита в порах
пластин аккумуляторов резко падает, а
поэтому быстро снижается э. д. с.
батареи. Приближенно скорость падения
тока аккумуляторной батареи при к. з.
составляет 0,2 Imа.б
в 1
С.
Поэтому
спадающая
часть тока к. з. аккумуляторной батареи
аибольшие
токи к. з. от аккумуляторной батареи
получаются, когда она полностью заряжена.
Из рис. 10.21 видно, что по достижении
максимума ток разряда батареи при ее
к. з. не остается постоянным, а
уменьшается. Это происходит потому, что
концентрация электролита в порах
пластин аккумуляторов резко падает, а
поэтому быстро снижается э. д. с.
батареи. Приближенно скорость падения
тока аккумуляторной батареи при к. з.
составляет 0,2 Imа.б
в 1
С.
Поэтому
спадающая
часть тока к. з. аккумуляторной батареи
6,25Статическая и динамическая устойчивость работы СГ.
Под устойчивостью понимают ее способность переходить от одного устойчивого режима к другому, какже устойчивому режиму после различного рода возмущений.
Различают статическую и динамическую устойчивость работы СЭЭС.
Статическая устойчивость СЭЭС называют ее способность возвращаться к исходному режиму (или близкому к нему) после малых изменений ее параметров.
Динамической устойчивостью СЭЭС называют ее способность переходить от исходного устойчивого режима к другому, также устойчивому режиму либо вернуться к установившемуся режиму близкому к исходному после больших изменений ее параметров.
Устойчивость включает в себя 2 взаимосвязанных понятия устойчивость параллельной работы Г и устойчивость нагрузки.
При рассмотрении параллельной СГ под устойчивостью понимают их способность продолжать работать синхронно при весьма малых колебаниях нагрузки(статическая устойчивость), а также при значительных, но не продолжительных колебаниях нагрузки(динамическая устойчивость).
Нарушение устойчивости работы СГ проявляется в следующем: переходе в двигательный режим; нарушении синхронной связи и переходе в асинхронный режим; нестабильном распределении нагрузки или ее постоянном колебании между параллельно работающими Г; отключении защитными средствами под действием максимальных прямых или обратных токов.
Статическая устойчивость параллельной работы СГ.
Из теории СЭМ известно, что принебрегая явнополюсностью ротора, электромагнитная мощность СГ.
![]()
Где Е, U – ЭДС и напряжение обмотки статора.
ϴ - угол между векторами эдс и напряжения, а также между векторами МДС обмотки статора и обмотки ротора в пространстве.
Э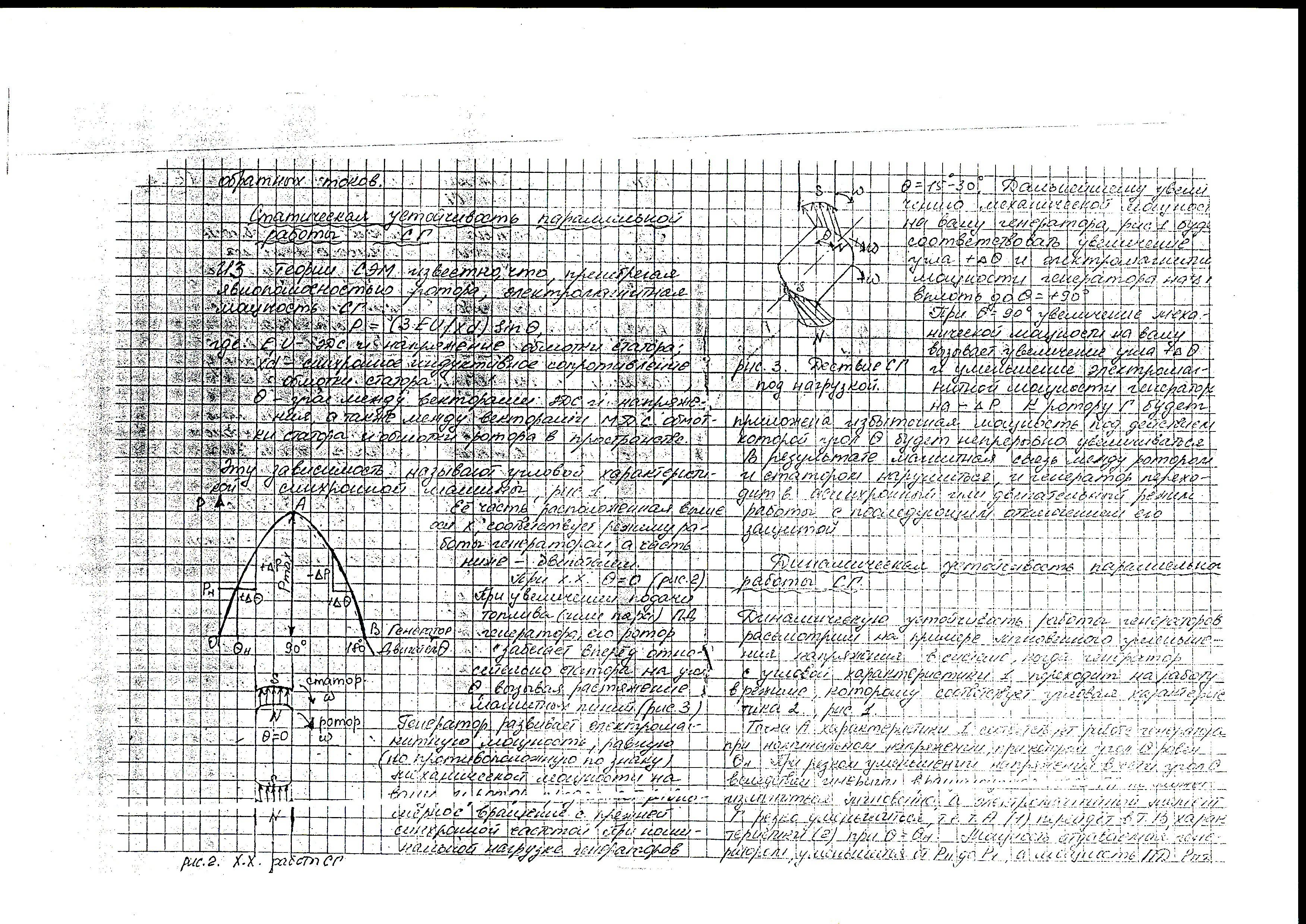 ту
зависимость называют угловой
характеристикой машины рис.
ту
зависимость называют угловой
характеристикой машины рис.
Ее часть расположенная выше оси х; соответствует режиму работы генератора, а часть ниже двигателям.
При х.х. ϴ=0 рис2 при увеличении подачи топлива(или пара) ПД генератора его ротор забегает вперед относительно статора на угол ϴ, вызывая растяжение магнитных пиков (рис3) Генератор развивает электромагнитную мощность равную (но противоположную по знаку)механической мощности на валу и ротор представляет равномерное вращение с прежней синхронной частотой. Про номинальной нагрузке генераторов ϴ-15-30 градусов. Дальнейшему увеличению механической мощности на валу генератора рис.1 будет соответствовать увеличение угла + Δ ϴ=+90град.
П риϴ=90
увеличение механической мощности на
валу вызывает увеличение угла +Δϴ
и уменьшение электромагнитной мощности
генератора на - ΔР. К ротору генератора
будет приложена избыточная мощность
под действием которой угол ϴ
будет непрерывно увеличиваться в
результате магнитная связь между ротором
и статором нарушается и генератор
переходит в асинхронный или двигательный
режим работы с последующим отключением
его защитой.
риϴ=90
увеличение механической мощности на
валу вызывает увеличение угла +Δϴ
и уменьшение электромагнитной мощности
генератора на - ΔР. К ротору генератора
будет приложена избыточная мощность
под действием которой угол ϴ
будет непрерывно увеличиваться в
результате магнитная связь между ротором
и статором нарушается и генератор
переходит в асинхронный или двигательный
режим работы с последующим отключением
его защитой.
Динамическая устойчивость параллельной работы СГ.
Динамическую устойчивость работы генераторов рассмотрим на примере мгновенного уменьшения в системе, когда генератор с угловой характеристики 1 переходит на работу в режиме, которому соответствует угловая характеристика 2 рис.1.
Т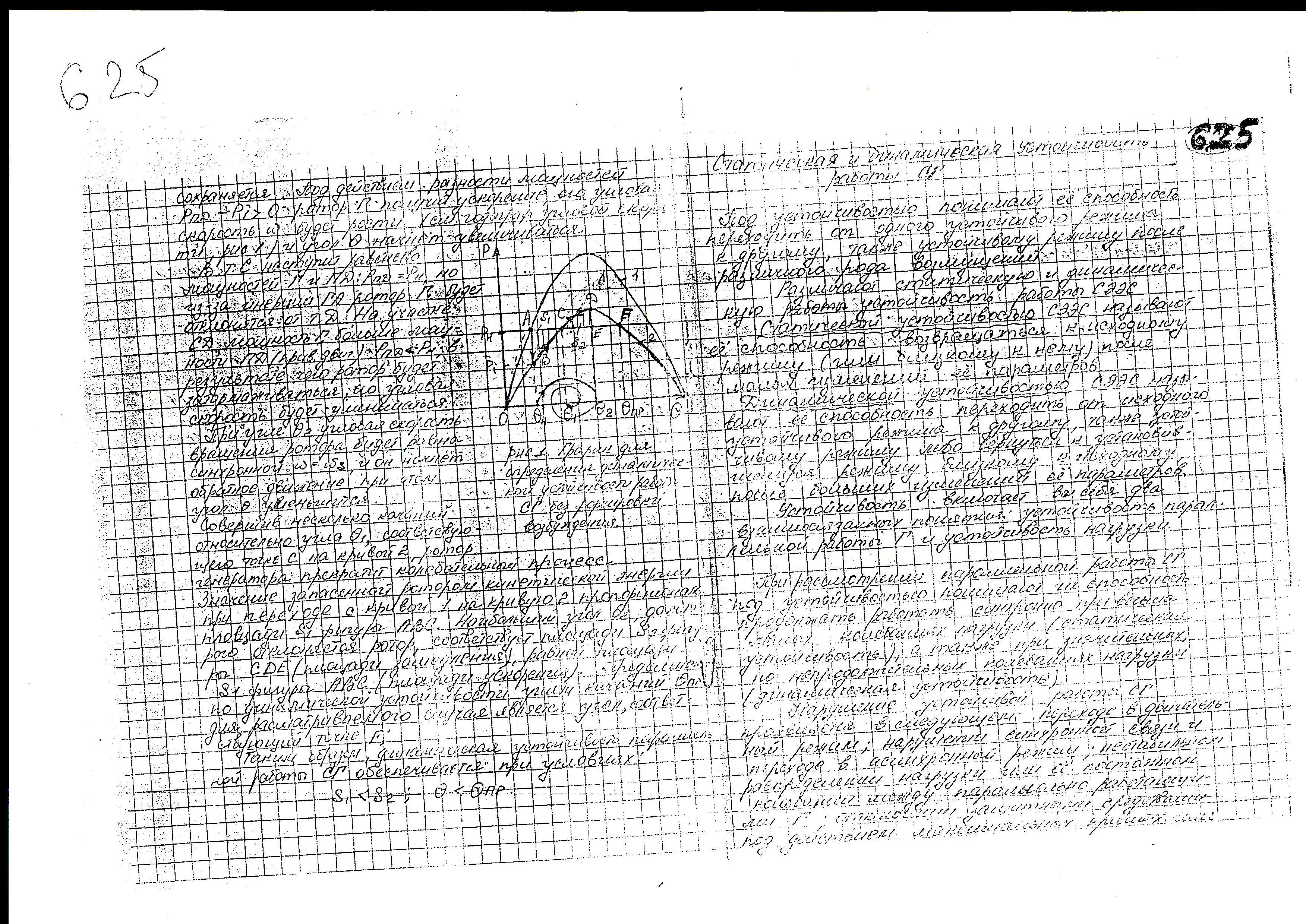 очка
А характеристики 1 соответствует работе
генератора номинальном напряжении при
котором уголϴ
вследствии инерции вращающийся ротоп
ГА не может измениться мгновенно, а
электромагнитный момент Г. резко
уменьшается, т.е. т.А (1) перейдет в т. В,
характеристика (2) при ϴ=ϴн.
Мощность отдаваемая генератором,
уменьшается от Рн до Р1, а мощность ПД
Рпд сохраняется. Под действием разности
мощностей Рпд>P1>0 ротор Г получит
ускорение его угловая скорость ω будет
рости и угол ϴ
начнет увеличиваться.
очка
А характеристики 1 соответствует работе
генератора номинальном напряжении при
котором уголϴ
вследствии инерции вращающийся ротоп
ГА не может измениться мгновенно, а
электромагнитный момент Г. резко
уменьшается, т.е. т.А (1) перейдет в т. В,
характеристика (2) при ϴ=ϴн.
Мощность отдаваемая генератором,
уменьшается от Рн до Р1, а мощность ПД
Рпд сохраняется. Под действием разности
мощностей Рпд>P1>0 ротор Г получит
ускорение его угловая скорость ω будет
рости и угол ϴ
начнет увеличиваться.
В т.С наступит равенство мощностей Г и ПД : Рпд=Рн, но из-за инерции ГА ротоп Г. будет отклоняться от т.Д На участке СД мощность Г. больше мощности ПД(прив двиг) Рпд<Рн, в результате чего ротор будет затормаживаться, его угловая скорость будет уменьшаться. При угле ϴ2 угловая скорость вращения ротора будет равной синхронной ω=ωs, и он начнет обратное движение при этом угол ϴ увеличивается.
Совершив несколько качаний относительно угла ϴ1, соотв т. С на кривой 2. Ротор Г. прекратит колебательный процесс. Значение запасенной ротором кинетической энергии при переходе с кривой 1 на кривую 2 пропорционально площади S1 фигура АВС. Наибольший угол ϴ2, отклоняется ротор, соответствует площади S2 фигуры CDE (площади замедления), равном площади S1 фигуры ABC(площади ускорения). Предельная по динамической устойчивости угла качаний ϴп для рассматриваемого случая является угол соответствующий точке Е.
Т.о. динамическая устойчивость парал. Работы СГ обеспечивается при условиях
S1<S2; ϴ<ϴпр