

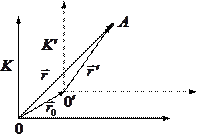
1. Система движется поступательно по отношению к системе.
Пусть
в ![]() системе
начало отсчета
системе
начало отсчета ![]() системы
характеризуется радиус-вектором
системы
характеризуется радиус-вектором ![]() ,
а её скорость и ускорение – векторами
,
а её скорость и ускорение – векторами ![]() и
и ![]() .
Если положение точки
.
Если положение точки ![]() в
в ![]() системе
определяется радиус-вектором
системе
определяется радиус-вектором ![]() ,
а в
,
а в ![]() системе
– радиус-вектором
системе
– радиус-вектором ![]() ,
то ясно, что
,
то ясно, что ![]() .
.
 Пусть
далее за промежуток времени
Пусть
далее за промежуток времени ![]() точка
точка ![]()
совершит
в ![]() системе
элементарное перемещение
системе
элементарное перемещение ![]() .
.
Это
перемещение складывается из
перемещения ![]() вместе
вместе
с ![]() системой
и перемещения
системой
и перемещения ![]() относительно
относительно
![]() системы,
т.е.
системы,
т.е.
![]() .
(1)
.
(1)
Поделив
это выражение на ![]() ,
получим искомую формулу
,
получим искомую формулу
преобразования скорости:
![]() .
(2)
.
(2)
Продифференцировав полученное выражение по времени, найдем и формулу преобразования ускорения:
![]() .
(3)
.
(3)
2. Система вращается с угловой скоростью вокруг оси, неподвижной в системе.
 Получим
сначала преобразования при условии
Получим
сначала преобразования при условии ![]()
![]() .
.
Выберем
начала отсчета ![]() и
и ![]() систем
в произвольной точке
систем
в произвольной точке ![]()
на оси вращения. Тогда в обеих системах отсчета радиус-вектор точки
![]() будет
один и тот же:
будет
один и тот же: ![]() .
.
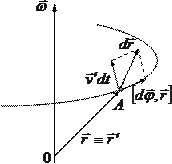
Если
точка ![]() неподвижна
в
неподвижна
в ![]() системе
(
системе
(![]() ),
это значит, что
),
это значит, что
её
перемещение ![]() в
в ![]() системе
за время
системе
за время ![]() обусловлено
только
обусловлено
только
поворотом
радиус-вектора ![]() на
угол
на
угол ![]() вместе
с
вместе
с ![]() системой
системой
и
равно векторному произведению ![]() .
.
Если
точка ![]() движется
относительно
движется
относительно ![]() системы
со скоростью
системы
со скоростью ![]() ,
,
то
за время ![]() она
совершит дополнительное перемещение
она
совершит дополнительное перемещение ![]() и
тогда
и
тогда
![]() .
(4)
.
(4)
Поделив
на ![]() ,
получим формулу преобразования скорости:
,
получим формулу преобразования скорости:
![]() ,
(5)
,
(5)
где ![]() и
и ![]() -
скорости точки
-
скорости точки ![]() в
в ![]() и
и ![]() системах
соответственно.
системах
соответственно.
Перейдем к ускорениям.
В
соответствии с (5) в ![]() системе
приращение
системе
приращение ![]() вектора
вектора ![]() за
время
за
время ![]() должно
складываться из суммы приращений
векторов
должно
складываться из суммы приращений
векторов ![]() и
[
и
[![]() ,
т.е.
,
т.е.
![]() ,
т.к.
,
т.к. ![]() .
(6)
.
(6)
 Если
точка
Если
точка ![]() движется
в
движется
в ![]() системе
с постоянной скоростью
системе
с постоянной скоростью
(![]() ,
то в
,
то в ![]() системе
это приращение обусловлено
системе
это приращение обусловлено
только
поворотом вектора ![]() вместе
с
вместе
с ![]() системой
и равно
системой
и равно
![]() .
.
Если
же точка имеет ускорение ![]() в
в ![]() системе,
то за время
системе,
то за время
![]() вектор
вектор ![]() дополнительно
получит приращение
дополнительно
получит приращение ![]() .
Тогда
.
Тогда
![]() .
(7)
.
(7)
Подставив
(4) и (7) в (6) и разделив на ![]() ,
получим формулу
,
получим формулу
преобразования ускорения:
![]() ,
(8)
,
(8)
где ![]() и
и ![]() -
ускорения точки
-
ускорения точки ![]() в
в ![]() и
и ![]() системах
отсчета. Второе слагаемое носит
название кориолисова (или
поворотного) ускорения
системах
отсчета. Второе слагаемое носит
название кориолисова (или
поворотного) ускорения
![]() ,
(9)
,
(9)
третье слагаемое –осестремительное ускорение
![]() (10)
(10)
{не путать с нормальным (центростремительным) ускорением}.
Рассмотрим более общий случай, объединяющий два предыдущих.
3. Система вращается с угловой скоростью вокруг оси, перемещающейся поступательно со скоростью и ускорением по отношению к системе.
Легко понять, что формула преобразования скоростей примет следующий вид
![]() .
(11)
.
(11)
Формула
преобразования ускорения в самом общем
случае (![]() )
приобретет вид:
)
приобретет вид:
![]() ,
(12)
,
(12)
![]() ,
(13)
,
(13)
где ![]() -
радиус-вектор, перпендикулярный оси
вращения и характеризующий положение
точки
-
радиус-вектор, перпендикулярный оси
вращения и характеризующий положение
точки ![]() относительно
этой оси.
относительно
этой оси.
Введя
обозначения ![]() ,
объединив члены выражения (12), не зависящие
от относительного движения точки
,
объединив члены выражения (12), не зависящие
от относительного движения точки ![]() ,
можно написать
,
можно написать
![]() ,
(
,
(![]() ).
(14)
).
(14)
Полученное выражение представляет собой математическую запись теоремы Кориолиса:
Абсолютное ускорение является векторной суммой относительного, кориолисова и переносного ускорений.
Основное уравнение динамики в нисо.
Из
выражения (13) следует, что ускорение
частицы в ![]() системе
(здесь
системе
(здесь ![]() )
)
![]() .
(15)
.
(15)
Умножив
обе части уравнения (14) на массу ![]() частицы
и учтя, что в ИСО
частицы
и учтя, что в ИСО ![]() ,
получаем
,
получаем
![]() .
(16)
.
(16)
Это
и есть основное
уравнение динамики в неинерциальной
системе отсчета,
которая вращается с некоторой угловой
скоростью ![]() вокруг
оси, перемещающейся поступательно с
ускорением
вокруг
оси, перемещающейся поступательно с
ускорением ![]() .
.
Очевидно,
что даже при ![]() частица
будет двигаться в этой системе отсчета
с ускорением, в общем случае отличным
от нуля, причем так, как если бы на него
действовали силы, описываемые членами
уравнения (16). Эти силы получили
название сил
инерции.
частица
будет двигаться в этой системе отсчета
с ускорением, в общем случае отличным
от нуля, причем так, как если бы на него
действовали силы, описываемые членами
уравнения (16). Эти силы получили
название сил
инерции.
Из
вида уравнения (16) следует, что введение
сил инерции позволяет сохранить форму
записи основного уравнения динамики и
для НИСО. Однако кроме силы ![]() ,
обусловленной действием на частицу
окружающих тел, необходимо учесть и
силы инерции, описываемые остальными
слагаемыми в правой части уравнения
(16).
,
обусловленной действием на частицу
окружающих тел, необходимо учесть и
силы инерции, описываемые остальными
слагаемыми в правой части уравнения
(16).