1.1) Переходная матрица. Методы ее нахождения и ее свойства.
 – переходная матрица, матрица перехода
из одного состояния в другое.
– переходная матрица, матрица перехода
из одного состояния в другое.
Она должна удовлетворять решению однородной системы:


Для нестационарной системы:
t1>t0:x(t1)=Ф(t1,t0)*x(t0)
t2>t1:x(t2)=Ф(t2,t0)*x(t0)
x(t2)= Ф(t2,t1)*x(t1)= Ф(t2,t1)* Ф(t1,t0)*x(t0) => Ф(t2,t0)= Ф(t2,t1)* Ф(t1,t0) =>
=> Ф(t,t0)* Ф(t0,t) = Ф(t0,t)* Ф(t,t0)=E
Для вычисления обратной матрицы, нужно поменять местами аргументы: Ф-1(t,t0)=Ф(t0,t)
Для стационарной системы:
Ф(t,t0)=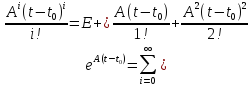 +… (*)
+… (*)
Проверим условия 1) и 2)


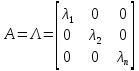
Рассмотрим простейший случай, когда матрица Aявляется диагональной
Ф(t,t0)
=
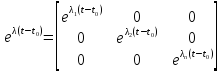
 , где
, где - собственный вектор, соответствующий
- собственный вектор, соответствующий
Составим из векторов блочную матрицу R
R= ,
, – вектор-столбец
– вектор-столбец
AR=RΛ,Λ– диагональная матрица
А=RΛR-1
Λ=R-1AR, это справедливо для целых степенейk, т.е. Аk=RΛkR-1,Λk=R-1AkR,
Подставляем Аk=RΛkR-1в (*), производя преобразования получаем:

Алгоритм.
Отаскание собств. Знач. Матрицы А
Ищем
собственные вектора
 ,
составляем матрицуRи
находимR-1
,
составляем матрицуRи
находимR-1
Находим Ф(t,t0)
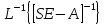
Отыскание перех. матрицы с помощью обратного преобразования Лапласа
t0 = 0
 ,
,
Ф(t,0)= =
=
Еще один способ отыскания перех. Матрицы
x(t)=Ф(t,0)*x(0)
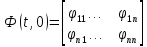 ,
, - описание перех. Процесса поi-ой
координате вектора состояния, при
задании единичного нач. условия наj-ую
координату, при остальных равных 0.
- описание перех. Процесса поi-ой
координате вектора состояния, при
задании единичного нач. условия наj-ую
координату, при остальных равных 0.
Еще один способ – отыскание через ряды.
2.1) Решение линейной нестационарной системы в пространстве состояний.
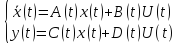
Найти решение x(t) начиная с некоторого момента времениt0 до ∞, представляющее собой траекторию вn- мерном пространстве, при задании входного воздействияU(t).
Решение ищем методом вариации постоянного, варьируя не скаляр, а векторную переменную.
Вектор
состояния:
 ,k(t) –n– мерный вектор варьируемых параметров
,k(t) –n– мерный вектор варьируемых параметров
Дифференцируем:

Подставляем x(t) в исходное уравнение:
 =>
=> =>
=>
Вопрос
существования
 закрывается
теоремой:
закрывается
теоремой:
На любом интервале времени, где A(t) интегрируема в смысле Римана, переходная матрица, удовлетворяющая свойству Ф(t,t0)=AФ(t,t0) является невырожденной.
Интегрируем

 ,
положимt=t0
(граничное условие)
,
положимt=t0
(граничное условие)

2.2)

Примеры нестационарных систем: Система наведения, автоматическая система посадки самолета.
3.1) Решение линейной стационарной системы в пространстве состояний.

1)проверяем
1-е условие для переходной матрицы:
(да, условие выполняется)
2)граничное
условие

Воспользуемся аппаратом линейной алгебры. Рассмотрим простой случай, когда матрица А является диагональной.


Приведем
А к диагональному виду.
 ;
;
 -собственный
вектор соответствующего собственного
значения
-собственный
вектор соответствующего собственного
значения .
.
Из
столбцов составим матрицу векторов:



 (преобразование
подобия)
(преобразование
подобия)
Справедливо
для целых степеней -

3.2)




Алгоритм:
1)Отыскиваются
собственные значения матрицы
 (корни хар-го выражения)
(корни хар-го выражения)
2)Отыскиваем
собственные вектора по выражению
 .
Строим матрицу
.
Строим матрицу
3)Подставляем
в