

Метод конечных элементов.
Сущность метода заключается в расчленении конструкции на отдельные стержни, с целью анализа, с последующим соединением их в единое целое в процессе синтеза. Сопряжение элементов осуществляется на основе составления трех групп уравнений:
Статических, описывающих равновесное состояние элементов системы;
Геометрических, устанавливающих связь между деформациями элементов и перемещениями их узлов;
Физических, связывающих между собой силы и деформации.
Для простоты рассмотрим плоскую стержневую систему, нагруженную узловыми сосредоточенными силами и моментами.




















М3 Р4
3 4
4
2
Р1
1
6
1 2
5 6 7
Пронумеруем узлы и стержни в произвольном порядке. Обозначим число узлов u, число стержней S. Мысленно выделим из рамы произвольный k стержень, соединяющий узлы i, j.
ξ







































lk Nj
Mj
Qi
 y
y
Nj
k

j
Pxj
Nj
Qj
Pyj
α
Qi
Mi i x
Ni y
Qi
i
Ni
x

Mi

Pui
Pxi
Вводим
2 системы координат: общую XY
и местную ξ .
Следуя общему плану решения задач
прочности, рассматриваем анализ,
состоящий из трех сторон задачи:
статической, геометрической и физической.
.
Следуя общему плану решения задач
прочности, рассматриваем анализ,
состоящий из трех сторон задачи:
статической, геометрической и физической.
Статическая сторона задачи.
Установим зависимость между внешними нагрузками, приложенными к узлам ij и внутренним усилиям в стержне k.
В левом сечении стержня возникают внутренние усилия Ni, Qi, Mi, которые мы объединим базовым вектором усилия для k стержня.

где индекс т означает транспонирование вектора или матрицы, когда столбцы меняются местами со строчками.
Будем считать, что внутренние усилия в сечениях, примыкающих к узлам, уравновешиваются некоторой частью внешних нагрузок Px, Py, Me, приложенных к узлу. Обозначим вектора частью внешних нагрузок в узлах i, j

Объединим их базовым вектором нагрузок для k стержня.

Эти внешние нагрузки создают внутренние усилия.
Составим уравнения равновесия для узла i.



Из условий равновесия стержня получаем:

Рассматривая условия равновесия узла j, аналогично узлу i, получаем с учетом равенств (*).



В матричной форме эти зависимости имеют вид:

где
 - матрица преобразования при переходе
из местной системы координат
- матрица преобразования при переходе
из местной системы координат в общуюXY.
в общуюXY.
Этой зависимостью устанавливается связь между внутренними усилиями в начале стержня и внешними нагрузками в узлах его примыкания (базовыми векторами внутренних усилий и базовыми векторами узловых нагрузок).
Геометрическая сторона задачи.
Установим зависимость между перемещениями узлов i, j и абсолютными деформациями стрежня k. Введем базовый вектор абсолютной деформации:

Где
 - деформация, соответствующая продольной
силеNi
(удлинение);
- деформация, соответствующая продольной
силеNi
(удлинение);
 -
деформация, соответствующая поперечной
силе Qi
(сдвиг);
-
деформация, соответствующая поперечной
силе Qi
(сдвиг);
 –деформация,
соответствующая изгибающему моменту
Mi
(поворот).
–деформация,
соответствующая изгибающему моменту
Mi
(поворот).
Базовый вектор перемещений узлов обозначим:

Где
 - перемещения узлов по осих,
- перемещения узлов по осих,
 - перемещения узлов по осиy,
- перемещения узлов по осиy,
 и
и - углы поворота узлов.
- углы поворота узлов.
Если
известны перемещения узлов, то через
них можно выразить деформации. Эти
геометрические соотношения более сложны
при выводе, чем статические уравнения.
В векторной форме эту зависимость можно
представить по аналогии с зависимостью
(1):
 т.е.
т.е. - некоторая матрица преобразования.
- некоторая матрица преобразования.
Чтобы более просто установить вид этой матрицы, воспользуемся принципом Лагранжа: если механическая система находится в равновесии, то сумма работ внешних и внутренних сил равна нулю. В качестве возможных можно принимать действительные перемещения, если они достаточно малы.
Работа внешних сил совершается на перемещениях узлов, а работа внутренних усилий – на абсолютных деформациях. Работа внутренних сил на действительных деформациях всегда отрицательна, поэтому можно записать, учитывая, что стержень рассматривается в положении равновесия:











i j
l0

rij rji


д
Подставляя в равенство формулы (1) и (2), получаем:
 .
.
Так
как слева и справа стоят одинаковые
вектора, то
 или
или
Таким
образом,

Физическая сторона задачи.
Мы установили статические (1) и геометрические (2а) зависимости. Для того, чтобы согласовать их между собой, воспользуемся законом Гука (какова деформация, такова сила, какова сила, такова деформация).

Где
элементы
 матрицы
матрицы есть абсолютные деформации по направлениюm
обобщенной силы, вызыванные действием
единичной обобщенной силы в n
направлении.
есть абсолютные деформации по направлениюm
обобщенной силы, вызыванные действием
единичной обобщенной силы в n
направлении.
Рассмотрим схему стержня, эквивалентную заданной:
Mi F1=Ni;
Ni








Qi lk F2=Qi
F3=Mi









При
действии продольной силы
 стержень удлиняется на
стержень удлиняется на ,
т.к.
,
т.к.

При
действии поперечной силы
 стержень изгибается, образуя прогиб и
угол поворота.
стержень изгибается, образуя прогиб и
угол поворота.














При
действии изгибающего момента
 стержень так же изгибается, образуя
прогибы и угол поворота.
стержень так же изгибается, образуя
прогибы и угол поворота.












Матрица Bk принимает вид:

Закон Гука можно записать в прямой форме (какова деформация, такова сила):
 где
обратная матрица
где
обратная матрица
 имеет вид:
имеет вид:

Подставим
зависимость (3) и (2а)
в (1) ( )
и получим:
)
и получим:

Где
 - матрица жесткости дляk
стержня, имеющего узлы i,
j.
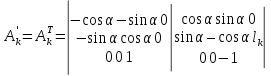
В развернутом виде матрицу жесткости
стержня для случая α=0 (
- матрица жесткости дляk
стержня, имеющего узлы i,
j.
В развернутом виде матрицу жесткости
стержня для случая α=0 ( )
можно записать так:
)
можно записать так:

Анализ отдельно взятого стержня закончен. Можно переходить к синтезу, т.е. к рассмотрению всей системы в целом. Исходные данные следующие:
Координаты узлов системы – геометрическая информация;
Жесткости поперечных сечений стержней – физическая информация;
Стержневая связь между узлами – топологическая информация;
Внешние нагрузки – статическая информация.
Требуется определить:
Усилия
 во всех стрежнях;
во всех стрежнях;Перемещения
 всех узлов.
всех узлов.
Обозначим:
 – вектор узловых нагрузок системы;
– вектор узловых нагрузок системы;
 -
вектор внутренних усилий системы;
-
вектор внутренних усилий системы;
 -
вектор узловых перемещений системы;
-
вектор узловых перемещений системы;
 -
вектор абсолютных деформаций системы;
-
вектор абсолютных деформаций системы;
А – матрица равновесия системы;
В – матрица податливости системы;
R – матрица жесткости системы.
Для поставленной задачи имеем:
Уравнения равновесия

Геометрические уравнения

Физические зависимости закона Гука

Так
как в число неизвестных входят только
усилия
 и перемещения
и перемещения ,
то исключим из трех видов уравнений
вектор деформации
,
то исключим из трех видов уравнений
вектор деформации .
Подставим (а), (б), (в):
.
Подставим (а), (б), (в):

Объединим уравнения (а) и (г) в одну систему:
 (д)
(д)
Матрица
А имеет
 строк и 3S
столбцов (u
– число узлов, S
– число стержней). Матрица
строк и 3S
столбцов (u
– число узлов, S
– число стержней). Матрица
 имеет 3S
строк
и
имеет 3S
строк
и
 столбцов.
столбцов.
Первое
векторное уравнение содержит
 алгебраических уравнений с 3S
неизвестными,
а второе векторное уравнение - 3S
алгебраических
уравнений с
алгебраических уравнений с 3S
неизвестными,
а второе векторное уравнение - 3S
алгебраических
уравнений с
 неизвестными. Всего уравнений
неизвестными. Всего уравнений ;
число неизвестных так же равно
;
число неизвестных так же равно каждый узел имеет 3 перемещения, а каждый
стержень 3 усилия.
каждый узел имеет 3 перемещения, а каждый
стержень 3 усилия.
Выразим
из второго векторного уравнения вектор
усилий



Подставим в первое векторное уравнение:

где
 - матрица жесткости системы.
- матрица жесткости системы.
Решая
уравнение с 3u
неизвестными
 находим перемещения всех узлов системы:
находим перемещения всех узлов системы:

Затем вычисляем усилия во всех стержнях системы:
