

§10. Колебания стержневых систем.
При воздействии на конструкцию нагрузок, меняющихся во времени, элементы конструкции совершают колебания, т.е. периодически повторяющиеся движения. Известно два наиболее простых видов колебаний:
Собственные, или свободные;
Вынужденные.
Свободные совершаются под влиянием какого-либо начального воздействия, например, импульса силы, а вынужденные – в результате непрерывного действия возмущающей силы.
Рассмотрим систему с одной степенью свободы.












y
y
 невесомая
балка
невесомая
балка
масса
Если нарушить равновесие системы, приложив импульс к массе или отклонив массу от состояния статического равновесия и затем предоставив самой себе, то при отсутствии сил сопротивления система будет совершать свободные колебания по гармоническому закону:

Где
 – начальное отклонение массы,
– начальное отклонение массы, – начальная скорость массы,
– начальная скорость массы, - круговая частота, т.е. число колебаний
за
- круговая частота, т.е. число колебаний
за секунд,
секунд, - амплитуда колебаний,
- амплитуда колебаний, - начальная фаза колебаний,
- начальная фаза колебаний, ;
; при
при .
.
Частота
колебаний является главнейшей динамической
характеристикой конструкции. Величина,
обратная круговой частоте, называется
периодом
колебаний
 .
Число колебаний за одну минуту называют
технической
частотой
.
Число колебаний за одну минуту называют
технической
частотой
 .
.
Если нагрузка претерпевает изменения в промежуток времени менее двух периодов свободных колебаний, то нагрузку следует считать динамической, а если изменяется в течении времени более пяти периодов колебаний, то эффект такой нагрузки близок к статическому. Если к массе приложить силу F(t), изменяющуюся по какому-либо закону, то система будет совершать вынужденные колебания.
F(t)







y





m
Перемещение массы в момент времени t будет определяться выражением:

Собственные колебания систем с n степенями свободы.
Рассмотрим
невесомую раму, несущую n
сосредоточенных масс, имеющих по одной
степени свободы. Отклоним конструкцию
от состояния статического равновесия
и предоставим ее самой себе. Каждая из
масс начнет совершать сложное движение,
складывающееся из n
простых движений следующего вида:

Pni
Pnn























mi mn

Pn,2


m2 Pn,1
m1
Исследуем это движение.
Применим
к движущейся системе принцип Даламбера,
который позволяет заменить дифференциальные
уравнения движения квазистатическими
уравнениями равновесия. Приложим к
каждой массе силу инерции


Как видно, сила инерции пропорциональна массе перемещению и квадрату частоты.
Вычислим перемещение по направлению степени свободы i массы, используя принцип суперпозиции:

Приведем подробные члены и разделим на квадрат частоты:

Раскрывая по всем i=1,2,…,n, получаем систему однородных алгебраических уравнений относительно перемещений.
 (*)
(*)
Для получения нетривиального решения необходимо потребовать, чтобы определитель, составленный из коэффициентов при неизвестных, обращался в ноль.
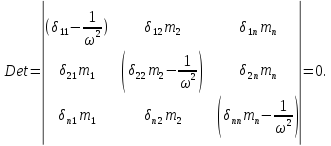
Раскрывая
определитель, получаем алгебраическое
уравнение n
степени относительно величины
 .
.

Это
уравнение называется уравнением
частот, или вековым уравнением.
В коэффициенты
 будут входить податливость и массы.
будут входить податливость и массы.
Решая
уравнение, находим n
действительных
корней
 ,
и, следовательно,n
различных частот колебаний
,
и, следовательно,n
различных частот колебаний
 .
.
Сложное движение каждой массы будет складываться из простых движений, соответствующих частотам колебаний.

Совокупность простых движений всех масс системы для какой-либо частоты колебаний определяет форму колебаний для этой частоты.
 k
форма колебаний.
k
форма колебаний.
Амплитудной
формой колебаний называют такое
отклонение системы от состояния
равновесия, для которого
 .
Каждая масса получает амплитудное
перемещение
.
Каждая масса получает амплитудное
перемещение ,
которое можно найти как результат
действия системы максимальных сил
инерции.
,
которое можно найти как результат
действия системы максимальных сил
инерции.

Чтобы
определить
 амплитудную форму колебания конструкции,
необходимо решить систему однородных
уравнений, получаемых из (*).
амплитудную форму колебания конструкции,
необходимо решить систему однородных
уравнений, получаемых из (*).
 (**)
(**)
Так
как определитель равен нулю, то система
имеет несчетное множество решений.
Обычно ее решают с точностью до постоянного
множителя, полагая
 и отбрасывая, как лишнее, последнее
уравнение системы, которое используют
для проверки.
и отбрасывая, как лишнее, последнее
уравнение системы, которое используют
для проверки.
Формы колебаний системы обладают свойством ортогональности:

Где
 - амплитуда
- амплитуда массы при
массы при форме колебаний;
форме колебаний;
 -
то же при
-
то же при
 форме колебаний.
форме колебаний.
Если
в системах уравнений (*) и (**) удается
получить все побочные податливости
равными нулю, т.е.
 при
при ,
то системы распадаются наn
независимых уравнений и легко решается.
,
то системы распадаются наn
независимых уравнений и легко решается.

Такие формы колебаний называют главными формами колебаний. В этом случае система с n степенями свободы ведет себя как система с одной степенью свободы, что облегчает динамический расчет.
Рассмотрим два частных случая.
а) Система с одной степенью свободы.

А1



















I форма
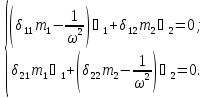
б)
Система с двумя степенями свободы.

 A11=1
A21
A11=1
A21


















II форма
 А12=1
А22
А12=1
А22




















Первой (меньшей) частоте соответствует знак плюс перед радикалом, а второй (большей) частоте – знак минус.
