

Поступательно - вращающееся звено.
Все точки такого
звена имеют одинаковые ускорения, равные
ускорению центра масс as,
а угловое ускорение
![]() равно нулю. Следовательно, при
поступательном движении звена действует
только сила инерции
равно нулю. Следовательно, при
поступательном движении звена действует
только сила инерции![]() ,
приложенная в центре масс.
,
приложенная в центре масс.
Вращающееся звено.
Если звено совершает
вращательное движение вокруг оси,
проходящей через центр масс, то ускорение
центра масс равно нулю (as=0)
и сила инерции также равна нулю (![]() ).
Если при этом звено вращается неравномерно
).
Если при этом звено вращается неравномерно![]() ,
то на звено будет действовать момент
сил инерции, определяемый по формуле
(4.2). При вращении звена с угловым
ускорением
,
то на звено будет действовать момент
сил инерции, определяемый по формуле
(4.2). При вращении звена с угловым
ускорением![]() вокруг оси, не совпадающей с центром
масс, на звено будет действовать сила
вокруг оси, не совпадающей с центром
масс, на звено будет действовать сила![]() ,
приложенная в центре масс, и момент сил
инерции
,
приложенная в центре масс, и момент сил
инерции![]() .
.
Заменяющие массы.В ряде случаев удобно массу звена условно заменить несколькими массами, сосредоточенными в заранее выбранных точках. Условия такой замены заключаются в эквивалентности сил инерции звена и заменяющей его фиктивной системы масс: сумма масс mi, расположенных в точках замещения, должна быть равна массеmзвена; сумма статических моментов относительно центра масс должна быть равна нулю; сумма моментов инерции сосредоточенных масс относительно оси, проходящей через центр масс, должна быть равна моменту инерции звенаJs.относительно этой же оси:
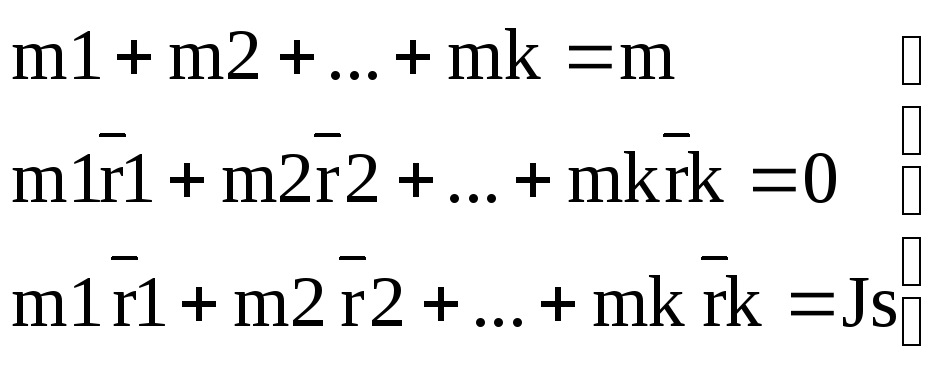 (4.3)
(4.3)
где
![]() -
радиусы- векторы замещающих точек.
-
радиусы- векторы замещающих точек.
Замена звена эквивалентной системой, удовлетворяющей всем условиям (4.3), называется динамическим замещением масс; если же выдержаны только первые два условия (4.3), то это статическое замещение масс. Последнее замещение упрощает задачу и даёт осуществить замещение двумя массами, расположенными в центрах шарниров (рис.4.1):
![]()
![]() и
и
![]()

Рис. 4.1. Заменяющие массы Рис.4.2. Схема сил в
поступательной паре
4.3. Силы трения Виды трения
Трение представляет собой явления сопротивления относительному перемещению, возникающее между двумя телами в зонах соприкосновения поверхностей по касательным к ним.
Различают трение скольжения и качения. Трение скольжения имеет место при относительном движении двух тел, скорости которых в точках касания различны. Трение качения возникает в высших кинематических, скорости которых в точках касания одинаковы по величине и направлению.
По состоянию поверхностного слоя и наличию смазки между элементами кинематических пар различают (ГОСТ 23ю002-78): трение без смазки, возникающее при отсутствии на поверхности трения, введённого смазочного материала всех видов; граничное трение - при наличии на поверхностях трения слоя жидкости, обладающего свойствами, отличающимися от объёмных; жидкостное трение, при котором возникает явление сопротивления относительному перемещению между двумя телами, разделёнными слоем жидкости, в котором проявляются её объёмные свойства.
На явление трения оказывают влияние свойства поверхностей. Из-за шероховатости и волнистости поверхностей, неточности изготовления деталей и изменения формы под действием приложенных нагрузок поверхности контактирует не по всей их площади, а по отдельным малым площадкам. Вследствие этого на соприкасающихся поверхностях даже при небольших сжимающих нагрузках возникают большие удельные давления. Под действием этих давлений происходят упругие и пластические деформации элементов поверхности, выступы поверхностей взаимно внедряются и на площадках контакта возникают силы молекулярного взаимодействия, что влияет на величину силы трения.