

17 Приведите пример механизма с абсолютно жесткой механической характеристики.
Синхронные эл.дв. , β=∞
Синхронный и асинхронный гистерезисный электродвигатели. Такую характеристику имеют синхронные электродвигатели. При жесткой механической характеристике частота вращения электродвигателя -меняется незначительно при изменении вращающего момента. Такую характеристику имеют электродвигатели постоянного тока с параллельным возбуждением и асинхронные электродвигатели (в пределах рабочей части характеристики).
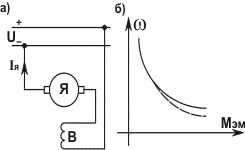
18 Докажите, что механическая характеристика дпт последовательного возбуждения является мягкой.
Механическая характеристика (рис. 5.23, б пунктирная линия) мягкая, имеет гиперболическую форму и обеспечивает устойчивую работу двигателя. Мягкость характеристики объясняется тем, что с увеличением момента нагрузки и соответственно уменьшением скорости растут ток и поток возбуждения. При больших нагрузках начинает сказываться насыщение магнитопровода и характеристика отличается от расчетной (сплошная линия). Двигатель последовательного возбуждения нельзя пускать без нагрузки на валу, так как при Мэм → 0, угловая скорость ω → ∞.
Квадратичная зависимость момента от тока позволяет при одинаковой кратности пускового тока получать у двигателя последовательного возбуждения больший пусковой момент, чем у двигателя независимого или параллельного возбуждения.
19 Докажите, что мех-ая характеристика ад на рабочем участке является жесткой.
Мех-ая характеристика (рис. 2а) - зависимость скорости вращения двигателя от момента нагрузки при фиксированном величине и частоте напряжения статора и параметров двигателя (сопротивлениях цепей статора и ротора).
Часто мех-ую хар-ку АД представляют в виде зависимости момента от скольжения (рис. 2б)
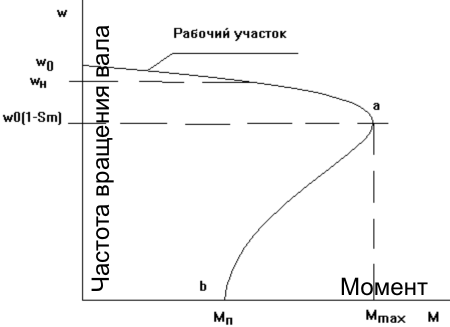
Рис. 2а. Типовой вид механической характеристики АД
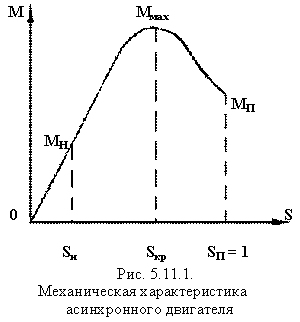
Рис. 2б. Мех-ая характеристика в координатах М(s) [20]
- рабочий участок (от Ω0 до точки а), где возможна работа АД в установившемся режиме по разомкнутой схеме.
20 Приведите вывод ур-ия электромех-ой хар-ки дпт параллельного возбуждения.
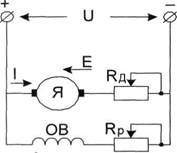
Рис. 2.1. Схема включения двигателя постоянного тока параллельного возбуждения
20 Приведите вывод ур-ия электромех-ой хар-ки дпт параллельного возбуждения.
Выражение электромех-ой хар-ки двигателя может быть получено из уравнения равновесия напряжений, составленного для якорной цепи
U = I · R + Е = I · R + kфω, (2.1)
где
U – приложенное к якорю напряжение; I –
ток в якорной цепи; R = Rд + Rа – сопротивление
якорной цепи, состоящее в общем случае
из сопротивлений добавочного резистора
Rд и якоря Ra = ra + rд.п. + rko; здесь ra, rд.п.,
rko – соответственно сопротивления
обмотки якоря, дополнительных полюсов
и компенсационной обмотки; ф – магнитный
поток; ω – угловая частота вращения
якоря двигателя; k – коэффициент,
зависящий от конструктивных данных
двигателя. Уравнение для угловой частоты
вращения двигателя может быть определено
из выражения (2.1):
![]()
Если учесть, что момент, развиваемый двигателем, связан с током якоря зависимостью М = kф · I, H·м,
то,
подставив значение тока из (2.3) в выражение
(2.2), можно перейти от электромеханической
характеристики ω = f ( I ) к механической
– ω = f (M)
![]()
Коэффициент kф для двигателей с независимым возбуждением можно принять независящим от нагрузки, если пренебречь реакцией якоря, тогда при ω = const зависимость электромагнитного момента, согласно выражению (2.3), будет иметь вид прямолинейной зависимости (рис. 2.2).