

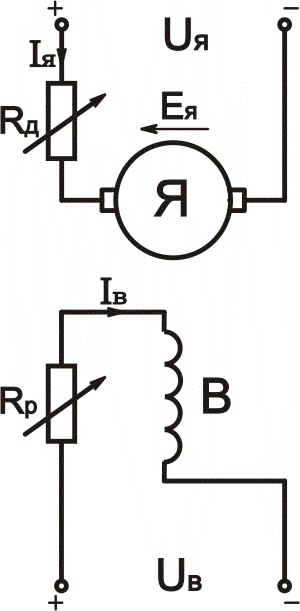
47) Достоинства и недостатки реостатного способа регулирования скорости дпт независимого возбуждения изменением потока возбуждения.
Достоинства простота осуществления и дешевизна.
Недостатки оно неэкономично примерно половина мощности, потребляемой из сети, будет рассеиваться в виде теплоты, выделяемой в реостате, т. е. плавность регулирования не большая.
48) Приведите вид механической характеристики дпт последовательного возбуждения при изменении напряжения источника питания.
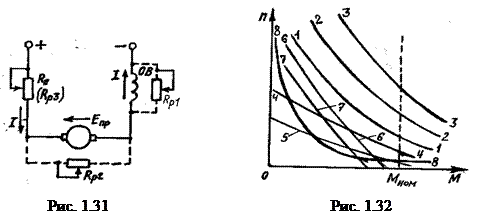
Регулирование частоты вращения изменением напряжения сети, как и в двигателях параллельного возбуждения, возможно только в сторону уменьшения частоты вращения при питании двигателя от отдельного генератора или управляемого выпрямителя. Механическая характеристика при этом способе регулирования изображена на рис. 1.32, кривая 8. При наличии двух двигателей, работающих на общую нагрузку, они с параллельного соединения могут переключаться на последовательное, напряжение U на каждом двигателе при этом уменьшается вдвое, соответственно уменьшается и частота вращения.
50) Дайте пояснение характера изменения механической характеристики ад при регулировании напряжения источника питания.

Напряжение питающей сети напрямую влияет на момент эл. двигателя

т.е. момент изменяется пропорционально кв. напряжению где к-коэфф. зависящий от параметров АД и скольжения
49 Приведите вид механической характеристики дпт последовательного возбуждения при реостатном способе регулирования.
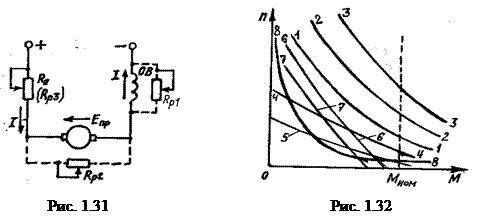
Изменение возбуждения можно осуществить включением реостата Rр1 параллельно обмотке возбуждения (см. рис. 1.31) или включением реостата Rр2 параллельно якорю. При включении реостата Rр1 параллельно обмотке возбуждения магнитный поток Ф можно уменьшать от номинального до минимального Фmin. Частота вращения двигателя при этом будет увеличиваться (в формуле (1.11) уменьшается коэффициент k). Механические характеристики, соответствующие этому случаю, показаны на рис. 1.32, кривые 2, 3. При включении реостата параллельно якорю ток в обмотке возбуждения, магнитный поток и коэффициент k увеличиваются, а частота вращения двигателя уменьшается. Механические характеристики для этого случая изображены на рис. 1.32, кривые 4, 5. Однако регулирование вращения реостатом, включенном параллельно якорю, применяется редко, так как потери мощности в реостате и КПД двигателя уменьшается.
51 Дайте пояснение характера изменения механической характеристики ад при реостатном способе регулирования.
Этот способ регулирования часто называют реостатным. Он заключается во введении добавочных (активных) сопротивлений в статорную или роторную цепь Д. Способ очень прост, но сопровождается значительными потерями и не позволяет получить высокое качество регулирования. Здесь может быть несколько вариантов [9].
Первый вариант: включение добавочного резистора в цепь статора.
Этот способ применяется для ограничения токов в переходный период. Обычно он используется для Д с короткозамкнутым ротором. Очевидно, что включение резистора приводит к снижению тока ротора и статора и не влияет на величину скорости идеального хода:

Критическое скольжение уменьшается:

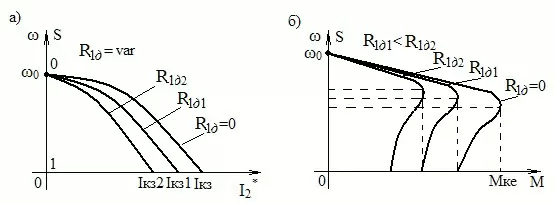
Рис. 5.5. Электромеханические (а) и механические (б) характеристики АД при введении добавочного резистора в цепь статора
Электромеханические характеристики (рис. 5.5, а) выходят из одной точки . С увеличением сопротивления жесткость характеристик уменьшается, и располагаются они в первом квадранте левее и ниже естественной. Как видно из характеристик, этот способ можно использовать для ограничения тока Д.
Анализ механических характеристик (рис. 5.5, б) показывает, что они также выходят из одной точки и располагаются ниже и левее естественной. С увеличением критический момент уменьшается, уменьшается также и критическое скольжение. Использовать этот метод для регулирования частоты вращения не представляется возможным из-за малого диапазона регулирования и малой перегрузочной способности. Этот способ также отличает низкая экономичность. Применяется данный способ, как правило, лишь для ограничения токов и моментов при пуске, торможении и реверсе.
Второй вариант: включение добавочного резистора в цепь ротора.
Этот метод используется только в Д с фазным ротором и состоит во введении добавочного сопротивления в цепь ротора. В данном случае переменной величиной является = var. При этом электромеханическая характеристика Д останется такой же, как и в предыдущем случае, а механическая будет существенно отличаться. Учитывая то, что критический момент не зависит от сопротивления фазы ротора (Мк=const), а критическое скольжение меняется, отсюда механические характеристики имеют вид, представленный на рис. 5.6.
При увеличении
характеристики выходят из одной точки
и располагаются ниже естественной.
Диапазон регулирования . Плавность
зависит от плавности изменения
регулировочного резистора . Данный
способ неэкономичен. Применяется он
при кратковременном регулировании
частоты вращения, а также для регулирования
тока и момента. В этой схеме возможно
добиться увеличения пускового момента,
и при этом перегрузочная способность
Д не меняется. Этот способ широко
используется в крановых Д. Потери в
роторе пропорциональны скольжению,
поэтому при увеличении увеличиваются
и потери.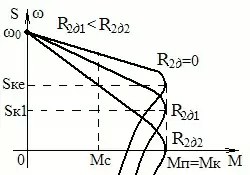
Рис. 5.6. Механические характеристики АД при введении добавочного сопротивления в цепь ротора