

Методички / Г.К. Барабошкина Изучение законов поступательного и вращательного движения с помощью маятника Обербека
.pdfМинистерство образования Российской Федерации
Кузбасский государственный технический университет
Кафедра физики
ИЗУЧЕНИЕ ЗАКОНОВ ПОСТУПАТЕЛЬНОГО И ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ С ПОМОЩЬЮ МАЯТНИКА ОБЕРБЕКА
Методические указания к лабораторной работе №209 по курсу общей физики для студентов всех направлений подготовки
Составитель Г. К. Барабошкина
Утверждено на заседании кафедры Протокол № 7 от 12. 04. 01
Рекомендовано к печати методической комиссией направления 550600 Протокол № 7 от 29. 05. 01
Электронная копия находится в библиотеке главного корпуса КузГТУ
Кемерово 2001

14
Лабораторная работа № 209
Изучение законов поступательного и вращательного движения твёрдых тел на крестообразном маятнике
1.Цель работы: а) освоение экспериментальных методов, позволяющих определять характеристики поступательного и вращательного движения твёрдого тела; б) экспериментальная проверка основных законов динамики.
2.Приборы и принадлежности: крестообразный маятник (маятник Обербека), набор грузов, секундомер, штангенциркуль, мерная рейка.
3.Подготовка к работе: прочитать в учебнике [ 1 ] разделы 2, 3, 4, 6, 12, 13, 16-19 и ответить на вопросы (см. с.10).
1.Описание установки
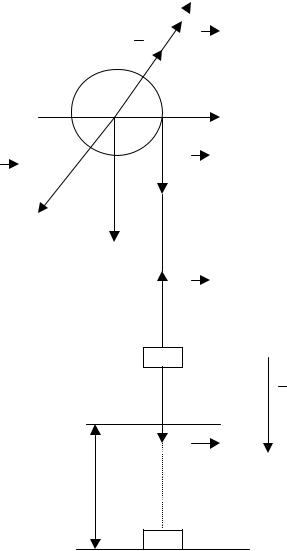
Рис. 1

142
Общий вид установки представлен на рис. 1. Маятник Обербека представляет собой двухступенчатый шкив (1) радиусами r1 и r2 с четырьмя взаимно перпендикулярными стержнями, на которых могут симметрично крепиться цилиндрические грузы (2) массой mo. На одну из ступеней шкива наматывается нить, к свободному концу которой крепится груз (3) массой m. В месте предполагаемого падения груза устанавливается тормозная площадка (4). Время опускания груза с высоты h измеряется миллисекундомером (5), включение и выключение которого осуществляется тумблером (6). Работа миллисекундомера согласована с работой тормозного электромагнита, который может удерживать крестообразный маятник с грузом в состоянии покоя (тумблер 7). Перед началом работы миллисекундомер и тормозной электромагнит (тумблер 8) должны быть отключены. При включении миллисекундомера груз начинает двигаться поступательно, разматывая нить и приводя маятник во вращательное движение относительно неподвижной оси. При ударе груза о тормозную площадку миллисекундомер отключается.
Внимание!!! Прежде чем намотать нить на шкив, необходимо тумблером (8) отключить тормозной электромагнит.
2.Теоретическая часть
5.1Поступательное движение груза
Поступательное движение груза массой m осуществляется под
действием силы тяжести m g и силы натяжения нити T (рис.2). По-
скольку эти силы не меняются в процессе движения, можно считать, что груз движется прямолинейно и равноускоренно согласно второму закону Ньютона:
mg +T = ma . |
(1) |
Проецируя векторные величины на ось ОY, можно записать |
|
mg −T = ma . |
(2) |
143
z
ε
 M
M
О
x
MТР Т′
y
T
a
mg
h, t
Рис.2
Кинематические уравнения прямолинейного равноускоренного движения в общем виде
|
+V 0x t + ax t |
2 |
x = x0 |
|
|
|
2 . |
|
|
|
|
V x =V 0x + ax t |
|
|
В нашем случае тело движется вдоль оси OY, причём его на- |
||
чальная скорость V 0 = 0 и за время t оно проходит расстояние h . |
||
Тогда получаем
14 |
|
|
|
= at |
2 |
h |
|
|
|
2 . |
|
|
|
|
V = at |
|
|
Из этих уравнений найдём основную кинематическую характеристику поступательного движения груза – ускорение:
a = 2h |
|
(3) |
|||
|
t2 |
|
|
||
и максимальную скорость, развиваемую грузом: |
|
|
|||
V = |
2h |
. |
|
|
(4) |
|
|
||||
|
t |
|
|
||
Определим основные динамические характеристики поступатель- |
|||||
ного движения груза: |
|
|
|||
силу натяжения нити T = m(g − a) , |
|
(5) |
|||
максимальный импульс груза P = mV , |
|
(6) |
|||
максимальную кинетическую энергию груза ЕК = |
mV 2 |
, |
(7) |
||
|
|||||
2 |
|
|
|||
потенциальную энергию груза на высоте h En = mgh . |
(8) |
||||
5.2 Вращательное движение маятника вокруг неподвижной оси
Основное уравнение динамики вращательного движения абсолютно твёрдого тела относительно неподвижной оси имеет вид
n |
= I εr, |
∑Mi |
|
i=1 |
|
n 
где ∑M i - векторная сумма моментов внешних сил, приложенных к i =1
телу;
J- момент инерции тела относительно оси вращения;
ε- угловое ускорение тела.
На маятник Обербека действуют моменты силы натяжения нити
M ′, момент силы трения MТР и момент силы тяжести MТ (рис. 2). Следовательно, основное уравнение динамики вращательного движения для крестообразного маятника можно записать в виде

145
M′+MТР+MТ = Jεr. |
(9) |
Направление векторов моментов сил и углового ускорения определяем по правилу буравчика (рис. 2). Момент силы натяжения нити равен
M ′ = [r,Т′],
где r - радиус – вектор, модуль которого в данном случае равен радиусу шкива.
Поскольку угол между направлениями векторов r и Т′ равен 90°,
а sin 90°=1, модуль вектора момента силы натяжения нити M ′= r Т′. Если нить считать невесомой, то сила натяжения нити по всей её
длине одинакова и, следовательно:
T =Т′ , а М′= r T . |
(10) |
Сила трения создаёт тормозящий момент M ТР = [r, FТр], а модуль |
|
вектора момента силы трения |
|
M ТР = r FТР . |
(11) |
Момент силы натяжения маятника равен нулю ( МТ =0). Момент силы трения препятствует вращению маятника, поэтому
основное уравнение динамики вращательного движения (9) в проекции на ось OZ
M ′− МТР = Jε . |
(12) |
Момент силы натяжения нити M ′ и момент инерции J |
вращающе- |
гося мятника неизменны. Момент силы трения МТР считаем незави- |
|
сящим от скорости вращения. Значит, угловое ускорение ε |
будет ве- |
личиной постоянной и вращение маятника можно считать равноускоренным.
Кинематические уравнения равноускоренного вращательного движения в общем виде:
|
+ω0 t + |
ε t2 |
ϕ =ϕ0 |
2 |
|
|
|
|
|
+ εt |
|
ω =ω0 |
|
и из состояния покоя (начальная угловая скорость ω 0 = 0 ):

|
14 |
|
|
6 |
|
ϕ = ε t2 |
|
|
|
2 . |
|
|
|
|
|
= εt |
|
ω |
|
|
Если нить, к которой подвешен груз, |
нерастяжима, то уско- |
|
рение поступательного движения груза a |
должно быть равно |
|
тангенциальному ускорению aτ точек, лежащих на ободе шкива.
Известно, что |
aτ =ε r . Значит, ε = |
aτ |
и с учётом уравнения (3) |
|||
r |
||||||
|
|
2h |
|
|
||
|
ε = |
. |
(13) |
|||
|
2 |
|||||
|
|
rt |
|
|||
Тогда максимальная угловая скорость, развиваемая маятником:
ω = |
2h |
|
|
, |
|
(14) |
|||||
|
rt |
|
|||||||||
|
|
|
|
|
|
|
|||||
а угол поворота маятника за время его ускоренного движения |
|||||||||||
ϕ = |
h |
. |
|
|
|
|
(15) |
||||
|
|
|
|
|
|||||||
|
|
|
r |
|
|
|
|
||||
Максимальная частота вращения |
|
|
|
|
|||||||
n = |
ω |
|
|
|
|
(16) |
|||||
2π |
|
|
|
||||||||
|
|
|
|
|
|||||||
и число оборотов N маятника за время t |
|
||||||||||
N = |
ϕ |
. |
|
(17) |
|||||||
|
|
||||||||||
|
|
|
|
2π |
|
|
|||||
Определим динамические |
|
характеристики |
вращательного |
||||||||
движения маятника. Момент силы натяжения нити |
М′ найдём из |
||||||||||
формулы (10) с учётом (5) и (3): |
|
2h |
|
||||||||
|
|
|
|
|
|
|
|
(18) |
|||
М′= m g − |
r . |
||||||||||
|
|
|
|
|
|
|
|
|
t2 |
|
|
Момент силы трения определяется экспериментально подбором минимальной массы груза mм, при котором движение маятника будет равномерным. Тогда, согласно первому закону Ньюто-
на М′+ МТР = 0 или в проекции на ось OZ М′−M ТР = 0 , т.е. момент силы трения будет равен моменту силы натяжения нити, а

147
сила натяжения нити будет равна силе тяжести груза. Значит, момент силы трения
МТР = m м gr . |
(19) |
Момент инерции маятника J найдём из уравнения (12): |
|
J = М′−МТР . |
(20) |
ε |
|
Максимальный момент импульса маятника |
|
L = J ω |
(21) |
и максимальная кинетическая энергия его вращательного движения
EкВр = |
J ω2 |
. |
(22) |
|
2 |
||||
|
|
|
Из вышеприведённых формул видно, что все характеристики поступательного и вращательного движений зависят от экспериментальных значений высоты падения груза h , радиуса шкива r ,
времени падения t и массы подвешиваемого груза |
m . Эти ха- |
рактеристики зависят также от момента инерции J , |
который яв- |
ляется мерой инертности маятника. Момент инерции |
J маятника |
можно изменять с помощью грузов m0 , располагаемых симметрично на стержнях (рис. 3).
На основании теоремы Штейнера и свойства аддитивности момента инерции
|
|
|
|
|
2 |
|
2 |
|
R |
|
2 |
|
|
J = |
J 0 |
+ 4 |
m0 |
l |
|
+ R |
|
+ r+b+ |
0 |
|
|
, |
(23) |
|
|
2 |
|||||||||||
|
|
12 |
4 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
148
где J 0 - момент инерции крестообразного маятника без грузов на стержнях;
b - |
расстояние от подвижного цилиндрического груза мас- |
сой m0 |
до поверхности маховика; |
l - |
длина цилиндрического груза; |
R0 - радиус цилиндрического груза; |
|
R - |
радиус маховика. |
6.Порядок выполнения работы на установке
1.Включите сетевой шнур установки в сеть. Тумблер 6 должен находиться в положении «Секундомер выключен».
2.Нажмите кнопку 8 «Тормоз отключен». Тормозной электромагнит отключается. Закрепите нить с подвешенным грузом на одном из шкивов и, вращая маятник, намотайте нить на шкив, подняв груз на фиксированную высоту.
3.Нажмите кнопку 7 «Тормоз включен». Тормозной электромагнит включается, удерживая груз в заданном положении. Установите тормозную площадку точно под грузом.
4.Переведите тумблер 6 в положение «Секундомер включен». Нажмите кнопку 8 «Тормоз отключен». Тормозной электромагнит отключается, груз начинает опускаться, миллисекундомер отсчитывает время движения груза.
5.Когда груз опустится на тормозную площадку, автоматически включится тормозной электромагнит, отсчёт времени прекращается. Маятник остановится.
6.Переведите тумблер 6 в положение «Секундомер включен». Уберите груз с тормозной площадки. Далее повторяйте последовательно пункты 2 – 6.
7.Выполнение работы
7.1.Исследование зависимости углового ускорения крестообразного маятника от вращающего момента сил.
Выполнять без грузов на стержнях.

149
Задание 1. Напишите кинематические уравнения поступательного движения груза и вращательного движения маятника. Выведите формулы для расчёта кинематических характеристик. Подумайте, как будут меняться эти характеристики при изменении массы груза и радиуса шкива r .
Задание 2. Экспериментальное определение кинематических характеристик.
а) Измерьте штангенциркулем радиусы r1 и r2 шкивов. б) Возьмите два разных груза известной массы m1 и m2 .
в) Намотайте на малый шкив нить, к свободному концу которой подвесьте груз меньшей массы. Зафиксируйте высоту подъёма груза h .
г) Действуя согласно п. 6, определите время t опускания груза с точностью до сотых долей секунды.
Опыт повторите три раза, результаты измерений занесите в табл.1.
Таблица 1
m1 =
r |
№ |
t |
t |
а |
V |
ε |
ω |
ϕ |
n |
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
М |
п/п |
с |
с |
м/с2 |
м/с |
С-2 |
с-1 |
рад |
об/сек |
об |
|
1 |
|
|
|
|
|
|
|
|
|
r1 = |
2 |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
m2 =
|
1 |
|
|
|
|
|
|
|
|
|
r2 = |
2 |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|