

3 Силовой анализ механизмов
3.1 Понятие о силовом анализе механизмов. Силы, действующие в механизмах
Основная задача силового анализа – определение реакций связей между звеньями механизма
Для проведения силового анализа должны быть известны:
массы звеньев mi и их главные моменты инерции Jsi ;
внешние силы и моменты, действующие на звенья;
законы движения звеньев механизма
Практическое применение результатов СА:
определение сил и моментов, которые необходимо приложить к ведущим звеньям для реализации заданного закона движения;
прочностной расчет деталей механизма;
подбор подшипников для вращательных КП;
выбор технических решений и определение конструктивных параметров для поступательных КП;
определение потребной мощности приводного двигателя;
уравновешивание движущихся масс.
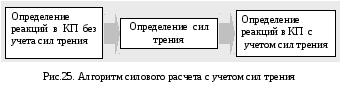
При проектировании механизмов учет сил трения требует знания величин реакций связей. Поэтому расчет обычно выполняют в следующей последовательности (рис.25):
определяют реакции в кинематических парах без учета сил трения;
используя найденные величины реакций, определяют силы и моменты трения;
определяют реакции в КП с учетом найденных сил и моментов трения.
Силы, действующие в механизмах. В теории механизмов силы подразделяют на движущие Fд и сопротивления Fс или моменты этих сил.
К движущим силам Fд или моментам Мд относят такие, которые обеспечивают движение механизма. Векторы движущих сил или совпадают с векторами скоростей тех точек звеньев механизма, к которым они приложены, или составляют острые углы. С энергетической точки зрения работа движущих сил Lд положительна.
Силы сопротивления Fc или моменты этих сил Мс делятся на силы полезных, или технологических (производственных), сопротивлений Fпc и силы вредных, или пассивных, сопротивлений Fвс.
Силами полезных сопротивлений называют такие, на преодоление которых создана машина. Векторы этих сил направлены в противоположную сторону векторов скоростей точек звеньев механизма или составляют с ними тупые углы. С энергетической точки зрения работа сил полезных сопротивлений Lпс отрицательна.
К силам
вредных сопротивлений
относят силы трения в кинематических
парах, силы аэродинамических сопротивлений
и др. На преодоление этих сил затрачивается
дополнительная работа сверх той, которая
необходима для преодоления полезного
сопротивления. Поэтому работа сил
суммарных сопротивлений
![]() .
.
Деление сил на движущие и силы сопротивления имеет некоторую условность. Так, силы тяжести звеньев при подъеме их центров масс оказываются силами сопротивлений, а при опускании центров — силами движущими; силы трения между шкивом и ремнем в ременной передаче являются движущими.
Если звенья механизма достаточно упруги, то при их продольном сжатии возникает сопротивление в виде упругой деформации и затрачиваемая при этом работа идет на накопление потенциальной энергии деформации, а в дальнейшем, когда звено освобождается от сжимающей силы, потенциальная энергия превращается в кинетическую.
Силовой анализ быстроходных механизмов должен выполняться с обязательным учетом сил инерции. При этом используется принцип Даламбера: звено механизма может рассматриваться, как находящееся в равновесии, если ко всем внешним силам и реакциям связи, действующим на него, добавить силы инерции. Уравнения равновесия в этом случае называют уравнениями кинетостатики.
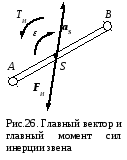 Главный
вектор сил инерции звена (рис.26):
Главный
вектор сил инерции звена (рис.26):
![]() ,
(3.1)
,
(3.1)
где m – масса звена;
аS – вектор ускорения центра масс звена
Главный момент сил инерции звена:
![]() ,
(3.2)
,
(3.2)
где JS – момент инерции звена;
ε – угловое ускорение звена.