

1.5 Замена в плоских механизмах высших кинематических пар низшими
Замена высших кинематических пар низшими применяется в плоских механизмах для удобства изучения их структуры и кинематики. Основными условиями замены являются сохранение первоначальной степени подвижности и относительных движений всех его звеньев, совершающихся в рассматриваемом положении. Рассмотрим четыре случая такой замены.
1. Пусть задан механизм с высшей парой, элементы звеньев которой представляют собой произвольно заданные кривые а и b (рис.13,а). Для построения схемы заменяющего механизма проводим нормаль n-n в точке С касания кривых и отмечаем на ней центры кривизны А и В кривых а и b. В точки А и В помещаем шарниры вращательных кинематических пар, образованных условными звеньями. Вместо исходного механизма получаем мгновенный заменяющий механизм О1АВО2 (рис.13,а).
а)
б)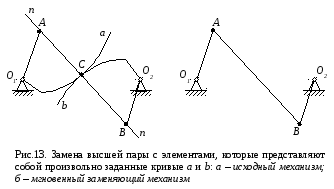
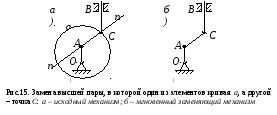
2. Рассмотрим механизм с высшей парой, в которой один из соприкасающихся элементов представляет собой кривую а, а второй – прямую b (рис.14,а). Для построения схемы заменяющего механизма проводим нормаль n-n в точке С касания элементов пары. Отмечаем центр кривизны кривой а – точку А, в которую помещаем шарнир вращательной пары. В точку С помещаем поступательную пару. Получаем мгновенный заменяющий механизм О1АСО2.
а)
б)
3. Рассмотрим случай, когда один из соприкасающихся элементов – кривая а, другой – точка С. Проводим нормаль n-n в точке С касания элементов пары. Отмечаем центр кривизны кривой а – точку А, в которую помещаем шарнир вращательной пары. В точку С также помещаем шарнир вращательной пары. Получаем мгновенный заменяющий механизм О1АСВ.
4. Рассмотрим случай, когда одним элементом является прямая О1С, а другим – точка С (рис.16,а). Замена сводится к постановке в точке С условного звена, входящего в одну поступательную и одну вращательную пары. Получаем мгновенный заменяющий механизм О1АСВ.
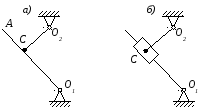
Рис.16. Замена высшей пары, в которой
один из элементов кривая О1А,
а другой – точкаС:а – исходный
механизм; б – мгновенный заменяющий
механизм
Таким образом, любой плоский механизм с высшими парами может быть заменен механизмом, в который входят только низшие пары.
1.6 Структурный анализ и синтез механизмов
Под структурным анализом механизма понимается определение количества звеньев и кинематических пар, классификация кинематических пар, определение степени подвижности механизма, а также установление класса и порядка механизма.
Структурным синтезом механизма называется проектирование структурной схемы механизма, которая состоит из неподвижного и подвижных звеньев и кинематических пар.
Наиболее удобным методом нахождения структурной схемы является метод присоединения структурных групп Ассура к ведущему звену или основному механизму. Группа Ассура названа по имени А.В.Ассура, который впервые фундаментально исследовал структурную классификацию плоских стержневых механизмов.
Группой Ассура
называется кинематическая цепь,
которая в случае ее присоединения
элементами внешних пар к стойке
получает нулевую степень подвижности,
т.е. образует ферму. Структурные формулы
групп Ассура получаются из формулы
Чебышева:
![]() ,
откуда
,
откуда![]() ,
гдеn
– число подвижных звеньев. Отсюда
следует, что число одноподвижных пар
пятого класса в группе обязательно
целое число. Этот принцип на рис.17,а-г
проиллюстрирован примером присоединения
двух двухповодковых групп с нулевыми
степенями подвижности к ведущему
звену (цифрами обозначены номера
звеньев).
,
гдеn
– число подвижных звеньев. Отсюда
следует, что число одноподвижных пар
пятого класса в группе обязательно
целое число. Этот принцип на рис.17,а-г
проиллюстрирован примером присоединения
двух двухповодковых групп с нулевыми
степенями подвижности к ведущему
звену (цифрами обозначены номера
звеньев).
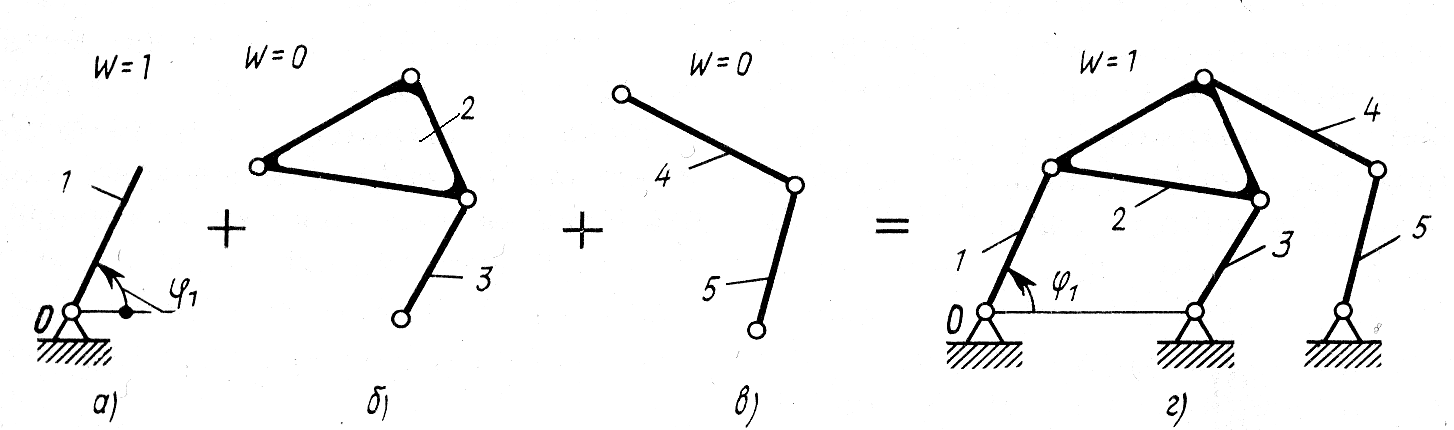
Рис.17. Пример образования плоского
шестизвенного механизма
По предложению И.И.Артоболевского класс и порядок механизма определяются по той группе, которая имеет наивысший класс и входит в состав механизма.
Порядок группы определяется числом элементов, которыми группа присоединяется к основному механизму (рис.18).
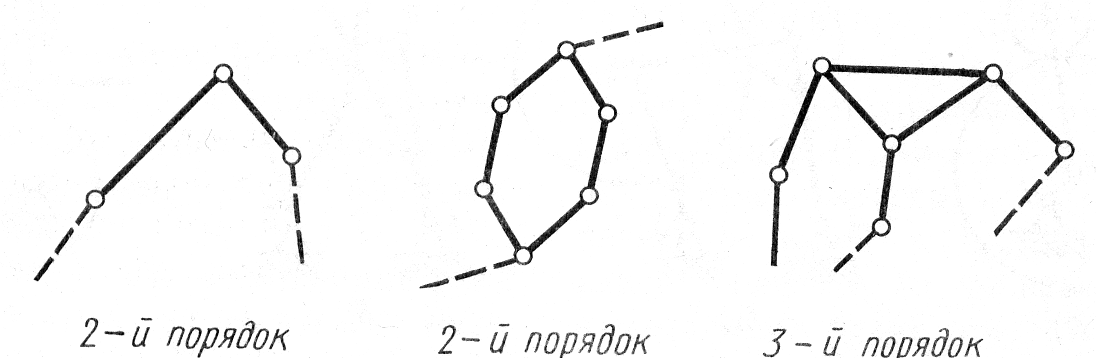
Рис. 2.13. Схемы групп различного порядка
Класс группы определяется классом наивысшего по классу контура, входящего в его состав.
Класс контура определяется количеством кинематических пар, в которые входят образующие его звенья (рис.19).
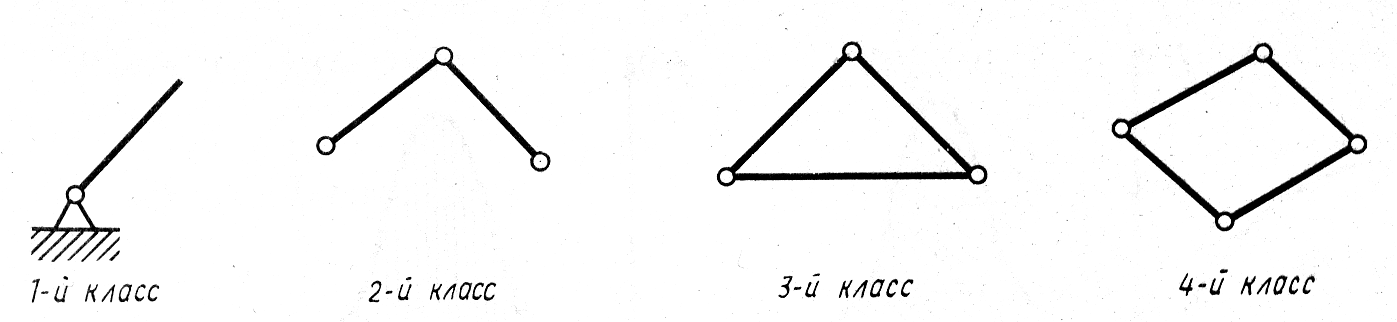
Рис.19. Схема к определению класса контура
Номер класса группы равен числу кинематических пар, входящих в замкнутый контур, образованный внутренними кинематическими парами, за исключением двухповодковой группы, которая условно относится ко второму классу.
Класс и порядок механизма зависят от того, какое звено является ведущим.
Принцип наслоения структурных групп распространяется на механизмы, звенья которых представляют твердые тела.
Структурная группа плоских механизмов может быть отражена формулой (1.1), если W = 0.