

1.3 Виды механизмов
Исходя из кинематических, конструктивных и функциональных свойств, механизмы подразделяют на рычажные, кулачковые, фрикционные, зубчатые и др.
Рычажные механизмы. Рычажными называют механизмы с геометрическим замыканием (запиранием) звеньев во вращательных и поступательных кинематических парах.
Благодаря этому они могут передавать большие усилия и мощности, чем другие механизмы в аналогичных условиях. Звенья механизмов сравнительно просты в изготовлении.
Механизмы применяют в основном для преобразования вращательного движения входного звена в качательное и возвратно-поступательное движение выходного звена.
Рычажные механизмы делятся на плоские и пространственные. Среди этого типа механизмов наибольшее распространение получили кривошипно-шатунные (рис.4,а,б) и кулисные (рис.4,в) механизмы. На рис.4 показаны схемы аксиального (рис.4,а) и дезаксиального (рис.4,б) кривошипно-шатунного механизма, используемого для преобразования вращательного движения кривошипа 1 в возвратно-поступательное движение ползуна 3. Ползун и кривошип соединяются с помощью звена 2, совершающего сложное плоское движение и соединенного с другими подвижными звеньями с помощью низших кинематических пар вращения. Дезаксаж (смещение) е вводится в основном для уменьшения давления ползуна на неподвижное звено 4.
На рис.4, в изображен кривошипно-кулисный механизм. Он состоит из кривошипа 1, кулисы 3, представляющей собой подвижное направляющее звено, и звена 2, называемого кулисным камнем. Если l>r, то вращательное движение кривошипа 1 преобразуется в возвратно-вращательное движение кулисы 3. Когда l<r, то при равномерном вращении кривошипа 1 кулиса 3 вращается с переменной угловой скоростью.
На рис.4,г представлен пространственный сферический механизм с низшими кинематическими парами, который служит для передачи движения между пересекающимися осями под углом α. Этот механизм известен под названием карданной передачи.
Кулачковые механизмы. Механизмы образуются путем силового замыкания звеньев: кулачка и толкателя (коромысла).
Кулачок обычно представляет собой диск (реже цилиндр), профиль которого очерчен определенной кривой, которая строго задает движение толкателю (коромыслу). В зависимости от вида движения сопряженное с кулачком звено называется либо толкателем (рис.5,а,б), либо коромыслом (рис.5,в,г). Кулачок и коромысло соединяют со стойками с помощью вращательных пар, толкатель — поступательной парой. Для уменьшения потерь на трение толкатель и коромысло снабжают цилиндрическими роликами.
Конструктивно силовое замыкание звеньев осуществляют за счет сил упругости (например, от предварительно деформированной пружины), реже — сил тяжести.
Механизмы используют для преобразования вращательного (рис.5,а,в) или возвратно-поступательного движения (рис.5,б) входного звена (ведущего звена) 1 в возвратно-поступательное (рис.5,а,б) или возвратно-вращательное (рис.5,в) движение выходного (ведомого) звена 2 даже с остановками заданной продолжительности.
В механизмах применяют также сложные плоские и пространственные механизмы в комбинациях с рычажными и зубчатыми механизмами.
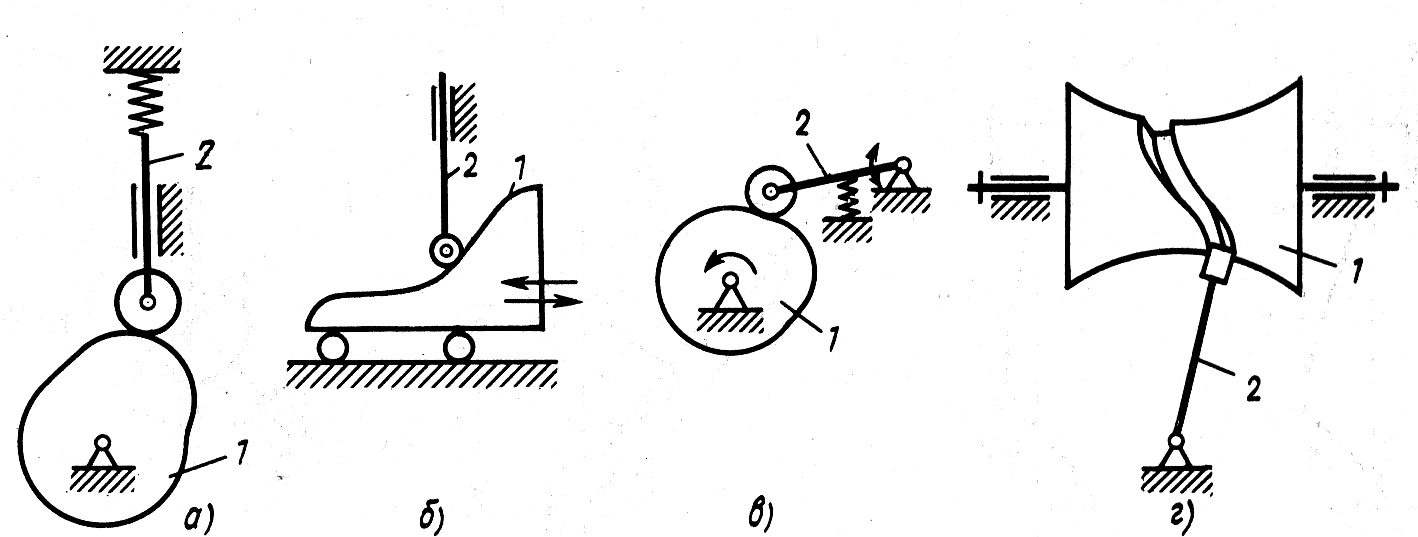
Рис.5. Кулачковые механизмы: а –
вращающийся кулачок и толкатель,
движущийся возвратно-поступательно;
б – возвратно-поступательно движущиеся
кулачок и толкатель,; в – вращающийся
кулачок и качающийся толкатель; г –
пространственный кулачковый механизм
Фрикционные механизмы. В этих механизмах движение от ведущего звена к ведомому передается за счет сил трения, возникающих в результате контакта этих звеньев.
Простейшая фрикционная передача (механизм) показана на рис.6,а. Она состоит из двух цилиндрических катков 1, 2 и стойки 3. Один каток прижимается к другому силой упругости пружины. К фрикционным механизмам относятся и вариаторы (рис.6,б), которые обеспечивают плавное изменение угловой скорости ведомого звена 2 при равномерном вращении ведущего звена 1 и его перемещении вдоль оси. Вариаторы называются бесступенчатыми передачами.
Фрикционный механизм может быть выполнен и с гибкими звеньями. Его применяют для передачи вращения между валами при больших межосевых расстояниях.
Под гибкими звеньями понимают ремни, канаты, цепи, нити. На рис.6, в приведена простейшая передача гибкой связью.
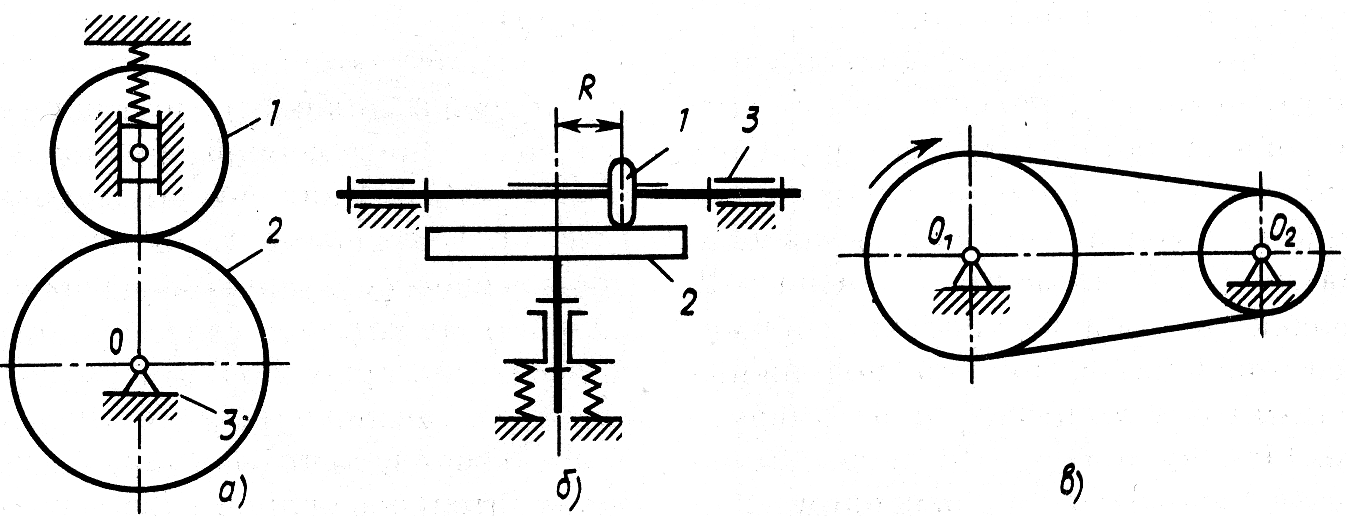
Рис.6. Фрикционные механизмы: а –
фрикционная передача; б – лобовой
вариатор; г – механизм с гибким звеном
Зубчатые механизмы. Зубчатыми называют механизмы (передачи), образованные с помощью зубчатых колес 1 и 2 — цилиндрических или конических дисков, снабженных выступами — зубьями (рис.7,а).
Рис.7. Зубчатые механизмы: а — обычный;
б — планетарный
Передача нагрузки и движения между колесами осуществляется за счет воздействия зубьев друг на друга (силового замыкания — зацепления зубьев). В отличие от фрикционной передачи здесь исключено проскальзывание звеньев.
Механизмы широко применяют в машинах для передачи вращения между неподвижными и подвижными осями. В последнем случае механизмы называют планетарными. На рис.7,б показан простейший планетарный механизм. Ось колеса 3, соединенная водилом 2 с осью колеса 1, совершает вращательное движение. Колесо 1 в этом случае называется центральным, а колесо 3 — сателлитом.
Волновые передачи (рис.8) по существу можно было бы назвать планетарными механизмами с гибким сателлитом.
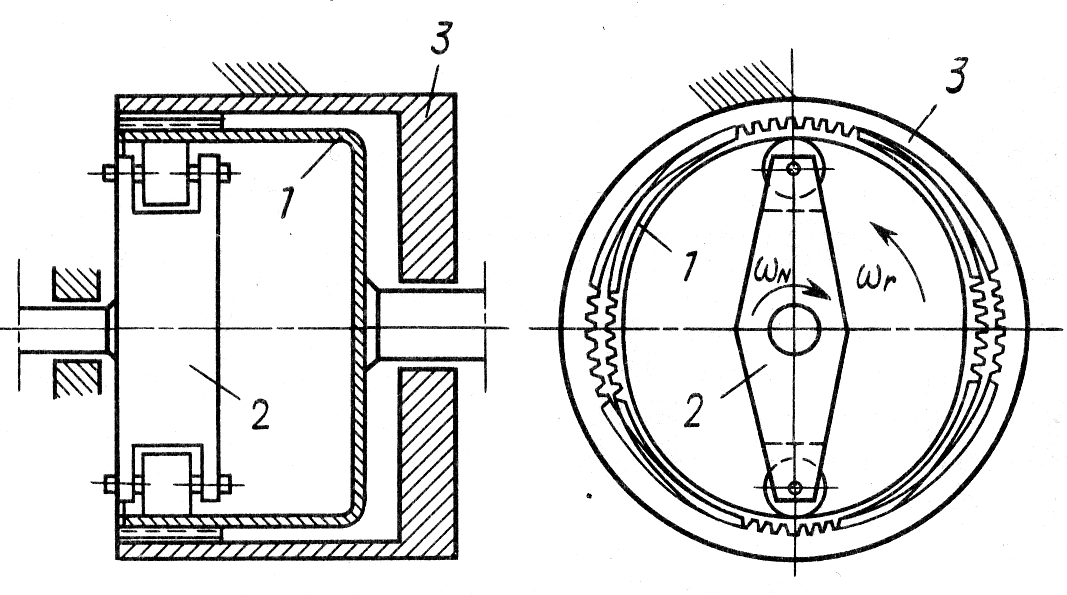
Рис. 8. Схема волновой передачи
В волновых передачах поток мощности распределяется по зонам зацепления с большим числом зубьев по сравнению с другими зубчатыми механизмами. Ролики генератора волн 2 деформируют гибкое колесо 1 при сборке и вводят его зубья в зацепление с зубьями жесткого колеса 3 по большой оси эллипса и выводят из зацепления по малой оси. Движение передается за счет «бегущей волны» деформации гибкого колеса. Число зубьев гибкого колеса меньше, чем у жесткого.
Крестовидный (мальтийский) механизм (рис.9) состоит из трех звеньев. Звено 1 несет на себе цевку, центр А которой удален от оси вращения О на расстояние r, а замок В представлен сектором, очерченным окружностью радиуса r0. Звено 2, называемое крестом, имеет несколько прорезей (на рис.9 — четыре) и такое же число замков D, очерченных радиусом r0. Неподвижное звено 3 имеет подшипники с центрами в точках О и С. Звено 1 вращается равномерно, а звено 2 то вращается, то останавливается. Когда замки В и D соприкасаются по окружности, звено 2 неподвижно. При дальнейшем вращении звена 1 цевка входит в прорезь креста 2 и крест вращается в направлении, противоположном вращению звена 1. Крест остается неподвижным до тех пор, пока цевка не войдет в следующую прорезь. Такой механизм применяется в киноаппаратуре, подающей киноленту.

Рис.9. Мальтийский механизм
Гидравлическими и пневматическими механизмами называются такие, в каждом из которых преобразование движения происходит посредством твердых и жидких или твердых и воздушных тел.
Н а
рис.10 приведена схема гидравлического
механизма, предназначенного для
привода в движение поршня1
с помощью распределителя 2.
Жидкость в цилиндр 5
поступает из распределителя в результате
поочередного включения электромагнитов
3
и 4.
Гидравлическая схема включает в себя
также насос 6,
бак 7
и клапан 8.
В пневматическом механизме насос
заменяют источником сжатого воздуха.
а
рис.10 приведена схема гидравлического
механизма, предназначенного для
привода в движение поршня1
с помощью распределителя 2.
Жидкость в цилиндр 5
поступает из распределителя в результате
поочередного включения электромагнитов
3
и 4.
Гидравлическая схема включает в себя
также насос 6,
бак 7
и клапан 8.
В пневматическом механизме насос
заменяют источником сжатого воздуха.