

Методичка по инж.графике в помощь
.pdf3.Рассматриваем положение прямой МN и линии пересечения FK. Они пересекаются, т.к. горизонтальные их проекции пересекаются, а фронтальные совпадают.
Точка пересечения прямой с плоскостью треугольника К (К1, К2).
4.Определяем видимость прямой линии МN с помощью конкурирующих точек.
Построение линий пересечения двух плоскостей по точкам пересечения прямых одной плоскости с другой
Этот способ заключается в том, что находят точки пересечения двух прямых, принадлежащих любой из пересекающихся плоскостей.
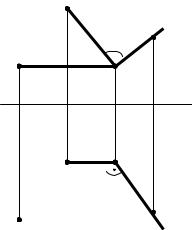
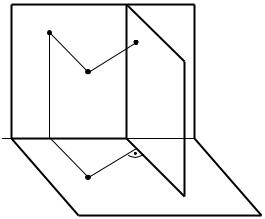
Задача: построить линию пересечения плоскости треугольника АВС и плоскости DEFK, заданной двумя параллельными прямыми (рис.83). Опреде-
лить видимость линий. А(110,55,15); |
В(65,23,55); С(10,70,10); D(55,15,3); |
||||||||||
Е(30,70,50); F(80,15,8); К(54,70,?). |
|
|
|
||||||||
|
|
|
|
B2 |
PП2 |
QП2 |
|||||
|
|
|
|
|
|
K2 |
E2 |
||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
M2 |
N2 |
32 |
|
|
|||
|
|
|
|
|
|
|
|
||||
|
A2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
22 |
|
42 |
|
C2 |
||||
|
|||||||||||
X |
|
|
F2 |
|
D2 |
|
|
|
|
О |
|
|
|
|
|
||||||||
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
F1 B1 |
D1 |
|
|
|
11 |
|
|
|
||
|
M1 |
31 |
|
|
|
|
|
|
|||
|
N1 |
|
|
||
|
|
|
|||
|
|
|
|
|
|
A1 |
41 |
|
|
||
21 |
K1 |
E1 |
|
C1 |
|
|
|||||
|
|
|
|||
Рис.83. Построение линии пересечения двух плоскостей
40
Решение
1.По заданным координатам строим проекции треугольника АВС, а также плоскость, заданную двумя параллельными прямыми FK и DE. Координата точки К “Z” не указана.
Так как прямые параллельные, то фронтальная проекция линии F2K2 проводится параллельно фронтальной проекции линии D2E2. И там, где эта линия пересечется с линией проекционной связи, проведенной из точки К1, определится фронтальная проекция точки К2.
2.Определяются точки пересечения прямых KF и DE с плоскостью треугольника АВС. Эти точки изображены своими проекциями М1, М2; N1, N2.
3.Соединяются одноименные проекции точек пересечения прямыми линиями. Это будут соответствующие проекции линий пересечения.
М1N1 – горизонтальная проекция линии пересечения. М2N2 – фронтальная проекция линии пересечения.
4.Определяется видимость линий с помощью конкурирующих точек.
41
Построение прямой линии, перпендикулярной плоскости
Прямая перпендикулярна плоскости, если она перпендикулярна двум пересекающимся прямым, принадлежащим этой плоскости.
Через точку пространства можно провести только одну прямую, перпендикулярную данной плоскости. А перпендикуляр плоскости – перпендикулярен любой прямой лежащей в плоскости.
А2
М2
С2
В2
Х
А1 В1
С1  М1
М1
Рис.84. Построение прямой, перпендикулярной плоскости
Зададим плоскость АВС двумя пересекающимися прямыми – главными линиями.
СВ – горизонталь плоскости.
С2В2 || Х – фронтальная проекция горизонтали. С1В1 – горизонтальная проекция горизонтали. АВ – фронталь плоскости.
А1В1 || Х – горизонтальная проекция фронтали. А2В2 – фронтальная проекция фронтали.
На основании теоремы о проекциях прямого угла проводим проекции перпендикуляра к плоскости АВС:
М1В1 С1В1 (горизонтальная проекция перпендикуляра). М2В2 А2В2 (фронтальная проекция перпендикуляра).
Правило: горизонтальная проекция перпендикуляра к плоскости перпендикулярна горизонтальной проекции горизонтали, а фронтальная проекция его перпендикулярна фронтальной проекции фронтали (рис.84).
Примечание: если плоскость задана следами, то горизонтальный след плоскости является нулевой горизонталью, а фронтальный след плоскости является нулевой фронталью. Поэтому горизонтальная проекция перпендикуляра к плоскости будет перпендикулярна горизонтальному следу плоскости, а фронтальная проекция его будет перпендикулярна фронтальному следу плоскости.
42
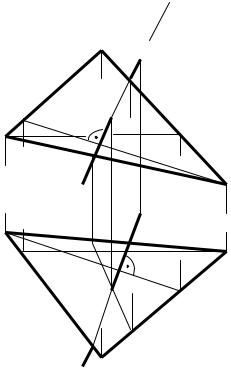
Задача: определить проекции расстояния от точки М до плоскости тре-
угольника АВС. Определить видимость линий (рис.85). |
|
|||||||||
|
А(65,10,15), В(38,42,38), С(8,15,3), М(30,5,35). |
|
|
|||||||
|
|
|
РП2 |
|
|
|
Решение |
|
||
|
|
|
|
|
|
1. |
Строим |
проекции треуголь- |
||
|
В2 |
|
|
|
|
ника АВС и точки М по заданным |
||||
|
|
|
М2 |
|
|
|
координатам. |
|
||
|
|
К2 |
|
|
|
|
2. |
В |
плоскости треугольника |
|
22 |
N2 |
|
|
|
|
АВС проводим главные линии – го- |
||||
|
А2 |
|
|
12 |
|
|
ризонталь и фронталь. |
|||
|
D2 |
L2 |
|
C2 |
|
|
А212 |
|| |
X – |
фронтальная проекция |
X |
|
|
горизонтали. |
|
||||||
|
|
|
|
|
O |
|
||||
L1 |
M1 |
|
|
А111 – горизонтальная проекция |
||||||
|
|
|
|
|||||||
|
A1 |
|
|
|
|
|
горизонтали. |
|
||
21 |
|
|
C1 |
С121 || Х– горизонтальная проекция |
||||||
|
N1 |
|
11 |
|
|
фронтали. |
|
|||
|
|
|
|
|
|
С222 – фронтальная проекция фрон- |
||||
|
|
|
|
|
|
|
||||
|
|
|
K1 |
|
|
|
тали. |
|
|
|
|
D1 |
B1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис.85. Определение проекции расстояния от точки М до плоскости треугольника
3.На основании правила проведения перпендикуляра к плоскости из точки
Мпроводим проекции перпендикуляра перпендикулярно главным линиям.
М1D1 _|_ A111 – горизонтальная проекция перпендикуляра.
M2D2 _|_ C2D2 – фронтальная проекция перпендикуляра.
4. Строим точку пересечения перпендикуляра MD с плоскостью треугольника АВС.
а) перпендикуляр заключаем во фронтально-проецирующую плоскость Р
(РП2).
б) строим линию пересечения плоскости треугольника АВС с плоскостью
Р (К2L2, K1L1).
в) определяем точку пересечения перпендикуляра с плоскостью треугольника АВС (N1, N2).
5.Искомое расстояние от точки М до плоскости треугольника выражено проекциями перпендикуляра (M1N1, M2N2).
6.Определяем видимость перпендикуляра DM.
43
Построение взаимноперпендикулярных плоскостей
Построение взаимноперпендикулярных плоскостей осуществляется двумя способами
1.Плоскость проводят через перпендикуляр к другой плоскости.
2.Плоскость проводят перпендикулярно прямой, лежащей в другой плос-
кости.
Эти способы вытекают из условия перпендикулярности двух плоскостей, которое формулируется так:
если плоскость проходит через перпендикуляр к данной плоскости (или параллельно этому перпендикуляру), то она перпендикулярна к данной плоскости.
Обратное условие:
если плоскость перпендикулярна прямой, лежащей в данной плоскости, то плоскость перпендикулярна данной плоскости.
Примечание: плоскость, перпендикулярная одновременно к двум плоскостям, перпендикулярна линии пересечения этих плоскостей.
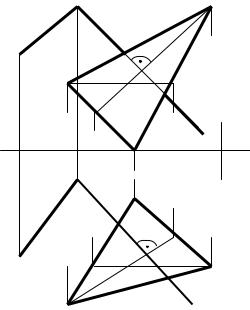
Задача: через прямую MN провести плоскость, перпендикулярную плоско- |
||||||||||
сти треугольника АВС. Плоскость задать двумя пересекающимися прямыми |
||||||||||
(рис.86). |
|
|
|
|
|
|
|
|
|
|
|
М2 |
А2 |
|
Решение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N2 |
|
|
|
1. Проводим |
проекции |
горизонтали |
||||
|
|
|
|
плоскости треугольника АВС (С2Е2 || Х, |
||||||
|
C2 |
E2 |
|
С1Е1). |
|
|
|
|
|
|
|
F2 |
|
|
2. Проводим |
проекции |
фронтали |
||||
|
|
|
плоскости треугольника АВС (A1F1 || X, |
|||||||
X |
B2 |
К2 |
O |
A2F2). |
|
|
|
|
|
|
M1 |
|
|
3. Из |
точки |
М2 |
проводим |
фрон- |
|||
|
B1 |
|
|
|||||||
|
|
|
тальную |
проекцию |
перпендикуляра |
к |
||||
|
|
|
|
|||||||
|
|
E1 |
|
плоскости треугольника АВС (М2К2 |
_|_ |
|||||
N1 |
|
|
A2F2). |
|
|
|
|
|
|
|
F1 |
A1 |
|
|
|
|
|
|
|
||
|
4. Из точки М1 проводим горизон- |
|||||||||
|
|
|
|
|||||||
|
|
К1 |
|
тальную |
проекцию |
перпендикуляра |
к |
|||
|
C1 |
|
|
плоскости треугольника АВС (М1К1 _|_ |
||||||
Рис.86. Построение взаимно перпенди- |
С1Е1). |
|
|
|
|
|
|
|||
|
кулярных плоскостей |
|
|
|
|
|
|
|
|
|
Две пересекающиеся прямые MN и MK определяют плоскость MNK, перпендикулярную к плоскости треугольника АВС.
44
Способы преобразования чертежа
В курсе начертательной геометрии рассматриваются позиционные, метрические и комплексные задачи.
Решение этих задач значительно упрощается, когда прямая, плоскость или поверхность находятся в частном положении относительно плоскостей проекций.
Когда требуется упростить решение задач общего вида, то прибегают к преобразованию чертежа, что позволяет прийти к частному их решению.
Существуют два основных способа преобразования чертежа.
1.Cпособ замены (перемены) плоскостей проекций.
2.Cпособ вращения.
Способ замены плоскостей проекций
Суть этого способа заключается в том, что для приведения в частное положение оригинала (или элемента его) положение оригинала в пространстве не изменяют, а изменяют существующую систему плоскостей проекций путем замены существующих плоскостей проекций так, чтобы оригинал (или элемент его) оказался бы в частном положении относительно новой системы плоскостей проекций.
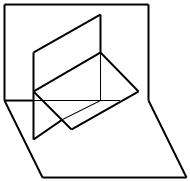
Замена одной плоскости проекций другой происходит так, что новая плоскость проекций выбирается обязательно перпендикулярно к оставшейся плоскости проекций (рис.87).
Z
|
|
|
|
П2 |
П1/П2 – заданная система плоскостей |
|
|
|
|
П3 |
проекций. |
||
|
|
|
|
|
|
Если к примеру заменяем фронталь- |
|
Х2 |
П4 |
ную плоскость проекций П2 на новую |
|||
|
|
|
|
|
|
фронтальную плоскость проекций П3, |
Х |
|
|
|
|
||
|
|
|
|
|
|
то эта плоскость располагается пер- |
|
|
Х1 |
|
|
П1 |
пендикулярно горизонтальной плоско- |
|
|
|
|
|
Y |
сти проекций (П3 _|_ П1). |
Рис.87. Способ замены плоскостей проекций |
|
|||||
В пересечении этих плоскостей образуется новая ось проекций Х1.
Таким образом после одной замены плоскости проекций мы перешли от системы плоскостей проекций П1/П2 к системе П1/П3.
Когда делаем вторую замену, т.е. заменяем горизонтальную плоскость проекций П1 на новую горизонтальную плоскость проекций П4, то П4 располагается перпендикулярно новой фронтальной плоскости проекций П3 (П4 _|_ П3). В пересечении плоскостей П3/П4 образуется еще одна ось проекций Х2. После второй замены плоскости проекций мы перешли от системы плоскостей проекций П1/П3 к системе П3/П4.
45
Новые плоскости проекций выбираются в зависимости от условия задачи. Многие задачи решаются заменой только одной плоскости проекций, а некоторые задачи решаются только с помощью замены двух плоскостей проекций.
Замена одной плоскости проекций
А2 |
П2 |
Пусть задана точка А в системе плоско- |
||
|
|
|||
А |
А4 |
стей проекций П1/П2. Требуется постро- |
||
= |
П3 |
ить проекции этой точки в новой систе- |
||
= |
= |
ме П1/П3. Заменяем фронтальную плос- |
||
АХ |
|
кость проекций П2 на новую фронталь- |
||
Х |
АХ1 |
ную плоскость проекций П3, которая |
||
|
|
располагается |
перпендикулярно гори- |
|
А1 |
Х1 |
зонтальной |
плоскости |
проекций |
|
П1 |
(П3_|_П1). |
|
|
Рис.88. Замена одной плоскости проекций |
|
|
|
|
Фронтальная плоскость проекций П3 пересекает горизонтальную плоскость проекций по новой оси проекций Х1. Таким образом перешли от системы плоскостей проекций П1/П2 к системе плоскостей проекций П1/П3 (рис.88).
Выполним обычное построение проекций точки А на все плоскости проекций, т.е. из точки А опускаем перпендикуляры на плоскости П1, П2, П3.
Получим соответствующие проекции точки на эти плоскости проекций
А1, А2, А3.
Горизонтальная проекция точки А1 является общей для двух систем плоскостей проекций.
Расстояние от точки А до плоскости проекций П1, (АА1) с одной стороны равно расстоянию А2АХ, а с другой равно А3АХ1.
Отсюда вытекает, что координата А2АХ равна координате А3АХ1.
46

Эпюр точки строится следующим образом (рис.89). А2
1.Строятся проекции точки в системе
|
П2 АХ |
|
П1/П2. |
|
|
|
2. |
У оси Х проставляются индексы плоско- |
|
Х |
|
|
стей проекций П1,П2. |
|
|
|
|||
|
П1 |
А3 |
3. |
Проводится новая ось проекций Х1. |
|
АХ1 |
|
4. |
У оси Х1 проставляются индексы плос- |
|
А1 |
|
костей проекций П1/ П3. |
|
|
|
5. |
Из горизонтальной проекции точки А1 |
|
|
П1 |
П3 |
проводится линия проекционной связи |
|
|
|
Х |
А1АХ1, перпендикулярно оси проекций Х1. |
|
Рис.89. Эпюр точки А, после замены плоскости проекций П2 на П3
6.координате А2АХ.
Таким образом, сделан переход от системы плоскостей проекций П1/П2 к
системе плоскостей проекций П1/П3.
Задача: способом замены плоскости проекций определить натуральную величину отрезка АВ и угол его наклона к горизонтальной плоскости проекций
(рис.90).
|
|
|
В2 |
|
|
Решение |
|
|
А2 |
≡ |
|
|
1. Проставляем индексы плоскостей проек- |
Х |
П2 = АХ |
ВХ |
|
|
ций у оси Х - П1, П2. |
|
|
|
2. Заменяем фронтальную плоскость проек- |
||||
|
|
П1 |
В1 |
|
|
|
|
|
|
|
ций П2 на новую фронтальную плоскость |
||
|
|
А1 |
|
|
|
проекций П3 так, чтобы она была параллель- |
П1 |
АХ1 |
ВХ1 |
|
|
на отрезку АВ. В этом случае новая ось про- |
|
Х1 П3 |
≡ |
|
|
екций Х1, должна быть параллельно гори- |
||
|
|
зонтальной проекции отрезка АВ (X1 || А1В1 ). |
||||
|
|
А3 |
α |
В3 |
||
|
|
3. Проставляем индексы плоскостей проек- |
||||
Рис.90. Определение натуральной |
ций у оси Х1 - П1, П3. |
|||||
|
величины отрезка АВ и угла |
|
||||
|
|
его наклона к П1 |
|
|
|
|
4. Из точек А1, В1 проводим линии проекционной связи перпендикулярно оси проекций Х1, и на них откладываем координаты точек А3, В3 (АХ1А3 = АХА2, ВХ1В3 = ВХВ2)
5.Соединяем проекции точек А3, В3 прямой линией. Отрезок А3В3 будет равен отрезу АВ, т.к. после замены он превратился во фронтальную прямую (А3В3
=АВ).
6.Определяем угол наклона отрезка АВ к горизонтальной плоскости проек-
ций α (угол между проекцией отрезка А3В3 и осью Х1).
47
Замена двух плоскостей проекций
При решении целого ряда задач, заданных в общем виде, замена только одной плоскости проекций не позволяет привести решение задачи к частному варианту. Поэтому при решении таких задач делают замену сначала одной, а затем другой плоскостей проекций. Замена второй плоскости проекций выполняется по аналогии с заменой первой плоскости проекций.
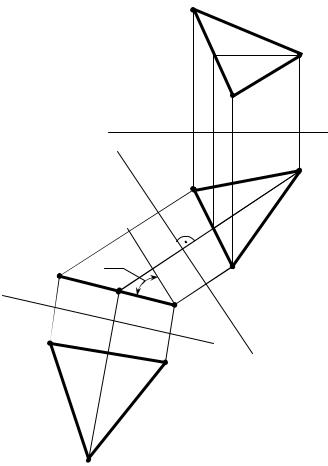
Задача: способом замены плоскостей проекций определить угол наклона плоскости треугольника АВС к горизонтальной плоскости проекций и его натуральную величину (рис.91).
|
|
А2 |
|
|
|
|
F2 |
С |
В2 |
|
|
|
|
|
Х |
П2 |
АХ |
СХ |
ВХ |
|
П1 |
А1 |
|
В1 |
|
|
|
||
|
АХ1 |
|
|
|
А3 |
α |
ВХ1 |
F1 |
|
|
|
|||
П3 |
В3 |
|
С1 |
|
Х2 |
|
|
СХ1 |
|
П4 |
|
С3 |
П1 |
|
А4 |
|
С4 |
П3 |
|
Н.В. |
|
Х1 |
|
|
|
|
|
|
|
В4 |
|
|
|
|
Рис.91. Определение угла наклона плоскости тре- |
||||
угольника АВС и его натуралньой величины спо- |
||||
собом замены плоскостей проекций |
|
|||
Решение 1. Первой заменой плоскости
проекций плоскость треугольника АВС преобразуется в проецирующую плоскость. В нашем случае треугольник преобразуется во фронтально-проецирующую плоскость путем замены фронтальной плоскости проекций П2 на новую фронтальную плоскость П3. Для этого в треугольнике АВС проводим горизонталь BF (B2F2 || X – фронтальная проекция горизонтали, B1F1 – горизонтальная проекция горизонтали).
Новую плоскость проекций П3 располагаем перпендикулярно горизонтали, в этом случае ось Х1 проводится перпендикулярно горизонтальной проекции горизонтали (Х1 _|_ B1F1).
Треугольник АВС окажется фронтально-проецирующим в новой системе плоскостей проекций П1П3 и спроецируется на плоскость проекций П3 в виде отрезка прямой линии А3В3С3.
Угол α между отрезком А3В3С3 и осью проекций Х1 – есть угол наклона плоскости треугольника к горизонтальной плоскости проекций.
2. Второй заменой горизонтальной плоскости проекций П1 на новую горизонтальную плоскость проекций П4 определяем натуральную величину тре-
48
угольника АВС. Для этого новая плоскость проекций П4 располагается параллельно треугольнику АВС, который на эту плоскость проецируется в натуральную величину. Ось проекций Х2 в этом случае проводиться параллельно фронтальной проекции треугольника, которая изображена прямой линией (Х2 || А3В3С3). Треугольник А4В4С4 будет равен натуральной величине треугольника АВС.
Способ вращения
Суть способа вращения состоит в том, что оставляют неизменной систему плоскостей проекций, а меняют положение оригинала в пространстве путем вращения его вокруг одной, или последовательно двух осей так, чтобы оригинал или элемент его оказался бы в частном положении в заданной системе плоскостей проекций.
В качестве осей вращения могут быть использованы: а) прямые, перпендикулярные к плоскостям проекций;
б) главные линии плоскости (способ вращения плоскости вокруг горизонтали или фронтали); в) следы плоскостей (способ вращения плоскости вокруг одного из следов
– способ совмещения); г) способ вращения без указания осей вращения (способ плоскопараллельного перемещения).
Вращение точки вокруг оси, перпендикулярной к плоскости проекций
А22 А12 |
А2 П2 |
Возьмем в системе плоскостей проекций |
SП2 |
|
П1П2 точку А и спроецируем ее на эти |
|
|
плоскости (рис.92). |
А2 |
О |
Выберем ось вращения ОО1, перпен- |
А |
дикулярно горизонтальной плоскости |
|
А1 |
S |
проекций (ОО1 П1). Будем вращать точ- |
Х |
|
ку А вокруг этой оси. Точка А будет вра- |
|
|
щаться по окружности, радиуса ОА в |
А21 |
О1 |
плоскости вращения S, перпенди- |
А1 |
кулярной фронтальной плоскости проек- |
|
А11 |
П1 |
ций (S П2). |
След плоскости вращения SП2 распо- |
||
Рис.92. Вращение точки вокруг оси, пер- |
лагается параллельно оси Х. |
|
пендикулярной к горизонтальной плоскости проекций
Горизонтальная проекция точки А1 будет перемещаться также по окружности, т.к. плоскость вращения S параллельна горизонтальной плоскости проекций.
49