

5 Методы получения стереопар сканерных снимков
Два метода: со смежных орбит и с одной орбиты (в аэросъемке маршрут эквивалентен орбите).
Смежные орбиты:

Рис.4
Недостаток: нельзя точно выбрать базис, одну и ту же территорию снимают в разное время (различные освещенность, тени и т.д.);
Одна орбита :
Одна камера наклоняется сначала на угол α1 а затем – на угол α2

Рис.5
Задавая различные углы наклона камеры можно выбрать длину базиса.
3) Одна орбита Три камеры с наклоном оптических осей относительно друг друга на угол α. При этом одна камера смотрит в надир
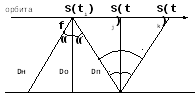
Рис.6
В результате имеем 3 стереопары.
У каждой камеры должно быть свое фокусное расстояние с тем, чтобы масштабы изображений были одинаковыми.
![]() (3)
(3)
очевидно, что ,
![]() ,
тогда для сохранения масштаба должно
быть
,
тогда для сохранения масштаба должно
быть ![]()
Аналогично
для камеры которая направлена вперед
![]()
4) Одна камера с тремя линейками
Для получения стереоскопических сканерных изображений в фокальной плоскости объектива сканерной съемочной системы располагают не одну а 3 или более линейки ПЗС, формирующих изображение одного и того же участка местности под разными углами (рис.7).
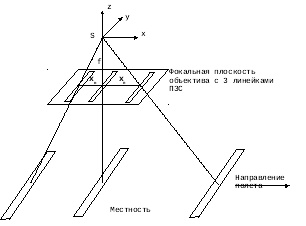
Рис.7 Схема одновременного сканирования с помощью 3 линеек ПЗС
xн xп являются постоянными величинами для камеры и определяются в результате ее калибровки.
6 Особенности фотограмметрической обработки изображений, полученных радиолокационными системами бокового обзора (рлс бо)
На рис.12 показан принцип радиолокационной съемки. Короткий импульс от передатчика, расположенного на носителе (самолете или спутнике), излучается в вертикальной плоскости с помощью направленной антенны. При достижении поверхности земли волна отражается. Часть отраженной энергии возвращается к приемнику, установленному на том же месте, что и передатчик. Принятая энергия квантуется. В результате получаются сигналы, пропорциональные принятой в данный момент энергии, зависящей от отражающей способности определенного участка местности. Одновременно измеряются наклонные дальности от передатчика до каждого из элементарных участков местности. Эти элементарные участки местности определяют разрешение съемочной системы. Таким образом, плотность пикселя радиолокационного изображения зависит от интенсивности отраженного радиосигнала от соответствующей точки объекта, а положение пикселя вдоль строки пропорционально наклонной дальности до данной точки. Строки изображения формируются за счет движения носителя.
Если расстояния до точек объекта равны между собой ( D1 и D2 на рис. 13), то эти разные точки объекта изобразятся в одной точке на снимке. Диапазон измеряемых расстояний и соответственно полоса обзора определяются параметрами съемочной системы и лежат в пределах Do и Dк начальной и конечной измеряемых дальностей.
Чтобы увеличить захват местности (полосу обзора), нужно увеличить время от начала посыла импульса до их приема.

Рис.12

Рис.13

Рис.14
Система координат радиолокационного изображения задается следующим образом. Ось yc совпадает с одной из строк изображения. Начало системы координат о совпадает с точкой соответствующей начальной дальности Do, которая фиксируется в момент съемки. Ось xc дополняет систему до правой.
Таким образом, измерив координату yc любой точки изображения можно узнать наклонную дальность до этой точки.
![]() (21)
(21)
где k – масштабный коэффициент, который определяется в результате калибровки системы.
Система координат самой радиолокационной системы задается следующим образом (рис.15).

Рис.15
Начало системы координат совпадает с точкой излучения радиоимпульса. Оси y,z лежат в плоскости излучения импульсов. Ось x дополняет систему до правой.
Плоскость излучения радиоимпульсов может быть произвольно ориентирована в пространстве
Радиолокационные снимки могут быть получены двумя способами, показанными на рис.16:
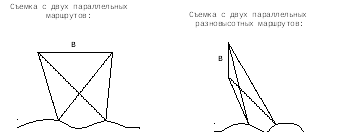
Рис.16