

1.2 Способы наблюдения и измерения стереопар цифровых снимков.
Стереоскопическое наблюдение и измерение стереопар цифровых снимков осуществляется путем формирования на экране дисплея компьютера фрагментов левого и правого снимков стереопары с изображениями измерительных марок.
Раздельное наблюдение этих фрагментов левым и правым глазом обеспечивается следующими методами:
с помощью стереоскопической наблюдательной системы, устанавливаемой перед экраном дисплея;
анаглифическим методом;
с помощью затворных очков;
поляроидным методом.
При использовании стереоскопической наблюдательной системы в виде зеркально-линзового стереоскопа, его устанавливают перед экраном дисплея, в левой части которого формируют изображение фрагмента левого снимка, а в правой части фрагмента правого снимка стереопары (рис. 1.2.6)
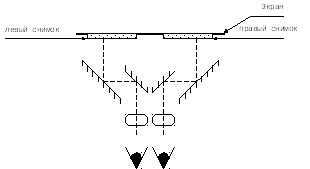
рис 1.2.6
При использовании анаглифического метода на экран дисплея одновременно выводится наложенные друг на друга фрагменты левого и правого снимков стереопары, первый из которых окрашивают в синий, а второй в красные цвета.
Перед левым глазом оператора устанавливают красный светофильтр, а перед правым глазом – синий. В этом случае оператор левым глазом наблюдает только левый снимок, а правым только правый.
Возможна так же комбинация красного и зеленого светофильтров, зеленого и синего светофильтров.
В затворных очках перед глазами наблюдателя установлены жидкокристаллические фильтры, которые при подаче на них напряжения по команде компьютера становятся непрозрачными. Стереоскопическое наблюдение снимков при их использовании проводится следующим образом: на экране дисплея попеременно выводятся фрагменты левого и правого снимков стереопары. При выводе левого изображения правый фильтр непрозрачен, а при выводе правого изображения, становится непрозрачным левый фильтр затворных очков (рис. 1.2.7)
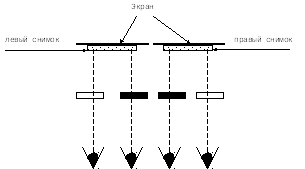
рис 1.2.7
При использовании поляроидного метода наблюдения, перед дисплеем устанавливается поляроидный экран, по команде компьютера, изменяющий ориентацию плоскости поляризации. Перед глазами оператора в очках устанавливаются поляризационные фильтры с взаимно-перпендикулярными плоскостями поляризации.
На экран дисплея переменно выводятся фрагменты левого и правого снимков стереопары. При выводе левого снимка ось поляризации экрана устанавливается параллельной оси поляризации левого фильтра очков, а при выводе правого снимка параллельной оси поляризации правого фильтра. В этом случае левым глазом наблюдается только левый снимок, а правым только правый.
1.3 Автоматизированные методы измерения точек на стереопаре цифровых снимков
Существующие методы отождествления соответственных точек на паре цифровых изображений, которые можно разделить на три группы:
Методы, основанные на анализе значений пикселей изображения в пределах некоторой области (ПМ – площадные методы);
Методы, основанные на выделении элементов изображения (ЭМ);
Методы, использующие связи между элементами изображения (СМ).
1.3.1 Площадные методы отождествления одноименных точек
Смысл этих методов сводится к сравнению плотностей пикселей двух изображений вокруг определяемой точки.
Существует два основных подхода:
Корреляционные методы
Смысл этих методов заключается в следующем: фрагмент одного из изображений вокруг определяемой точки как бы накладывается на другое изображение и перемещается по направлениям x и y с определенным шагом. В каждом положении вычисляется коэффициент корреляции R, максимальное значение которого соответствует лучшему совпадению точек.
Метод наименьших квадратов
Метод наименьших квадратов позволяет вычислить координаты соответственной точки на втором изображении непосредственно как функцию значений плотностей двух изображений. Некоторые разновидности этого способа используют геометрические связи между точками (уравнения коллинеарности). Этот метод имеет некоторые преимущества по сравнению с первым методом:
более высокая точность определения соответственных точек;
устойчивость решения к геометрическим искажениям изображений;
возможность оценки точности определения (измерения) координат.
Недостатки: необходимость знания достаточно точных начальных приближений координат определяемой точки. В противном случае выполняется много приближений и как следствие большие затраты машинного времени.