

1.7 Построение и уравнивание маршрутной и блочной сети фототриангуляции по методу связок с самокалибровкой
При построении и уравнивании сетей маршрутной и блочной фототриангуляции в измеренные на снимках значения координат точек вводятся поправки, позволяющие исключить систематические ошибки снимков, вызываемые дисторсией объектива съемочной камеры, деформацией фотопленки, рефракцией и другими причинами.
Однако снимки, получаемые в результате аэрофотосъемки, тем не менее, имеют остаточные систематические искажения, которые вызваны изменением параметров элементов внутреннего ориентирования и дисторсии съемочной камеры в полете из за разницы значений температуры и давления по сравнении с их значениями, полученными при проведении калибровки съемочной камеры, отличием параметров слоя атмосферы от параметров стандартной атмосферы, влиянием на положение точек на снимке оптического люка и другими причинами.
Эти систематические искажения снимков можно исключить или в значительной мере ослабить их влияние при построении и уравнивании связок с самокалибровкой и, как следствие, повысить точность фототриангуляции.
В этом методе в отличие от метода, изложенного в разделе 1.6 для каждой точки, измеренной на снимке, составляются уравнения:
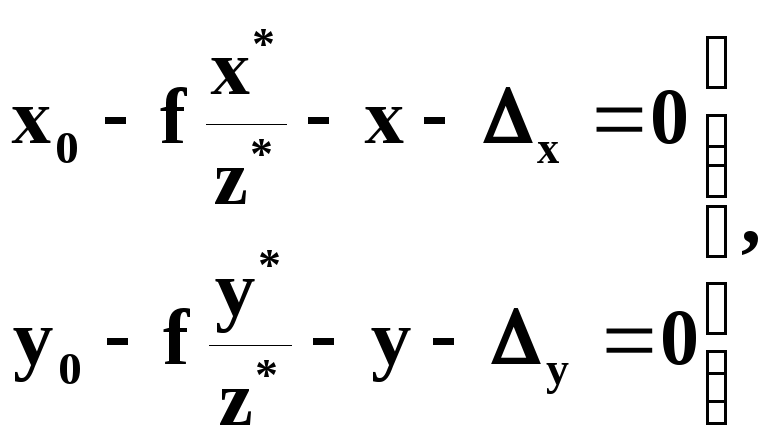 (1.7.1)
(1.7.1)
в которых:
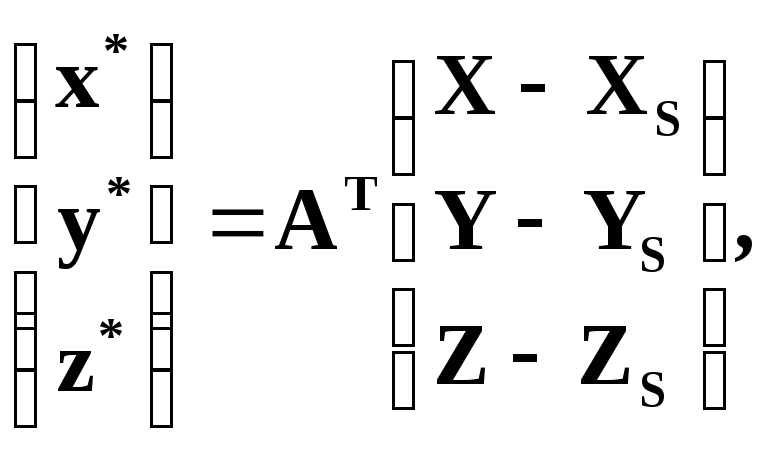
а
![]() и
и![]() - полиномы, описывающие систематические
искажения снимков.
- полиномы, описывающие систематические
искажения снимков.
Полиномы, описывающие в уравнениях 1.7.1 систематические искажения снимков, могут иметь различный вид. В качестве примера приведем один из таких полиномов:
 (1.7.2)
(1.7.2)
где![]()
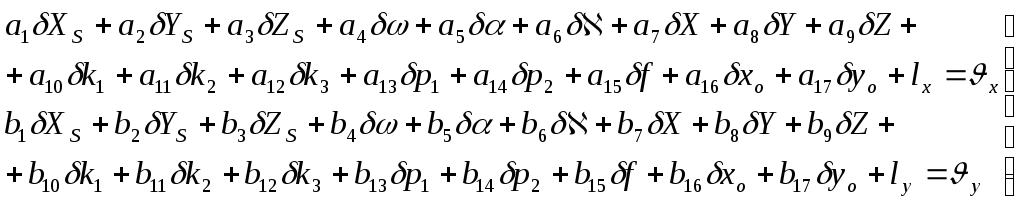 Уравнения
поправок соответствующие уравнениям
(1.7.1) имеют вид: (1.7.3)
Уравнения
поправок соответствующие уравнениям
(1.7.1) имеют вид: (1.7.3)
Построение и уравнивание сети фототриангуляции производится аналогично построению и уравниванию сети фототриангуляции по методу связок в результате решения по методу наименьших квадратов системы уравнений поправок (1.7.2) и уравнений поправок, составленных для опорных точек и измеренных значений элементов внешнего ориентирования снимков.
В результате решения находим значения элементов внешнего ориентирования снимков, значение координат точек местности и значения коэффициентов полинома (1.7.2).
Необходимо заметить, что общее количество неизвестных определяемых при построении и уравнивании сети фототриангуляции в рассматриваемом способе увеличивается на количество коэффициентов полинома (в нашем случае эта величина равна 6) плюс поправки к элементам внутреннего ориентирования (3 шт.) итого: 9.
При построении сети необходимо контролировать степень корреляции коэффициентов полинома, элементов внешнего ориентирования снимков и координат точек местности.
В случае большой степени корреляции коэффициентов полинома между собой и другими определяемыми величинами эти коэффициенты необходимо исключить или использовать другой вид полинома.
В некоторых современных программах фототриангуляции этот процесс может выполняться автоматически.
Цифровое трансформирование снимков
1.1. Назначение и области применения цифрового трансформирования снимков
Трансформированием снимков в фотограмметрии называют процесс преобразования исходного снимка объекта в изображение объекта в заданной проекции.
При цифровом трансформировании исходный снимок представляет собой цифровое изображение, получаемое или непосредственно цифровой съемочной системой или путем преобразования аналогового снимка в цифровую форму на сканере.
Основными областями применения цифрового трансформирования являются топография и картография.
При создании и обновлении карт различного назначения по аэрокосмическим снимкам создаются трансформированные изображения местности в проекции карты. Эти изображения могут быть созданы по одиночным снимкам или по нескольким перекрывающимся снимкам. Цифровое трансформирование выполняется с точностью, соответствующей точности предъявляемой действующими нормативными документами к точности карт соответствующего масштаба.
Цифровые трансформированные изображения используют для создания контурной части карт, путем векторизации цифровых изображений в среде CAD или ГИС, а также как самостоятельные картографические документы. В частном случае, если при трансформировании снимков не учитывается влияние кривизны Земли и проекции карты на положение контуров, трансформированное изображение представляет собой ортогональную проекцию местности на горизонтальную плоскость. Такой вид трансформирования называется ортофототрансформированием.
Помимо топографии и картографии, цифровое трансформирование используется для создания по исходным снимкам перспективных изображений местности из заданных точек пространства. Такие изображения используют в военной области, например, в летных тренажерах и в архитектуре - при проектировании различных сооружений.
Цифровое трансформирование применяют также для преобразования стереопар исходных снимков в стереопару снимков идеального случая съемки в системе координат фотограмметрической модели. Такое преобразование выполняется в цифровых стереофотограмметрических системах.
В настоящей главе рассматриваются теоретические основы цифрового фототрансформирования снимков, в частности, методы наблюдения и измерения цифровых снимков и методы создания цифровых трансформированных снимков и фотопланов.