

1.6 Оценка точности цифровых трансформированных фотоснимков и фотопланов
Созданные в результате цифрового трансформирования снимков цифровые изображения местности по точности должны соответствовать требованиям, предъявляемым к их точности нормативными документами Роскартографии, если фотопланы предназначены для создания кадастровых и топографических карт (планов) или технического задания на производство работ, если фотопланы создаются для решения других задач.
Контроль созданных трансформированных фотосников и фотопланов проводят по расхождениям значений координат контрольных точек, измеренных непосредственно на цифровом плане и координат этих точек, определенных в результате геодезических измерений или в результате построения сети пространственной фототриангуляции.
В качестве контрольных точек выбираются только точки, расположенные непосредственно на земной поверхности, так как изображения объектов местности возвышающихся над ней (крыши домов, мосты и т.п.) имеют на фотопланах искажения.
Контроль фотопланов производится также по расхождениям одноименных контуров расположенных на линии пореза (граничной линии) смежных трансформированных фотоснимков.
В случае если трансформированные фотоснимки и фотопланы создавались для создания топографических и кадастровых карт (планов), расхождения в плане положения контрольных точек не должны превышать величины 0.5 мм в масштабе создаваемой карты (плана), а расхождения одноименных контуров на граничной линии величины 0.7 мм.
При цифровом трансформировании снимков с целью контроля точности определения элементов ориентирования исходных
снимков и точности построения цифровой модели рельефа местности, перед выполнением процесса формирования цифровых трансформированных изображений производят априорную оценку их точности.
Априорная оценка точности производится по контрольным точкам, путем сравнения значений их плановых координат, определенных в результате геодезических или фотограмметрических определений и значений координат расчетного положения изображения контрольной точки на трансформированном изображении.
Определение плановых координат расчетного положения изображения контрольной точки производится по значениям координат изображений контрольных точек на исходных снимках, значениям элементов внутреннего и внешнего ориентирования снимков, параметрам внутреннего ориентирования снимка в системе координат цифрового изображения с использованием цифровой модели рельефа. При этом используется алгоритм, аналогичный алгоритму определения координат углов граничной линии на фотоплане (раздел 1.5).
При определении координат в качестве начального приближения, используется высота контрольной точки, значение которой было определено в результате геодезических или фотограмметрических определений.
Проведение априорной оценки точности позволяет проконтролировать качество фотограмметрических работ, выполняемых для обеспечения процесса цифрового трансформирования и при необходимости повторить эти процессы.
Теория стереопары снимков
1. Методы наблюдения и измерения стереопар снимков
1.1. Основы монокулярного и бинокулярного зрения
Монокулярное зрение – зрение одним глазом. Качественно оно оценивается разрешающей способностью глаза или остротой зрения. Различают остроту зрения первого и второго рода.
Остротой монокулярного зрения первого рода называют минимальный угол, под которым наблюдатель различает две отдельные точки раздельно. Принято считать, что для области наилучшего зрения это угол 45’’.
Остроту монокулярного зрения второго рода характеризует минимальный угол, под которым наблюдатель различает две параллельные линии раздельно. Установлено, что этот угол равен 20’’. Особенно велика острота зрения при оценке смещения одной половины прямой линии по отношению к другой. Относительное смещение линий в этом случае видно под углом 10’’-12’’ и меньше.
Оценивать расстояния до наблюдаемых предметов (воспринимать глубину) монокулярное зрение позволяет лишь с помощью косвенных признаков.
Бинокулярное зрение – зрение двумя глазами, имеет существенное значение для восприятия пространственного положения объектов и их объемной формы.
О
 сновным
фактором оценки глубины пространства
при бинокулярном зрении является
физиологический параллакс, представляющий
разность дуг на сетчатке глаза (рис.1.1.1),
определяющих положение пары соответственных
точек. Например, А – точка фиксации, то
физиологический параллакс точки В равен
разности дуг а1b1
- a2b2
. При приближении точки В к А наступит
момент, когда наблюдателю будет казаться,
что точки находятся на одинаковом
удалении, хотя в действительности
разность их глубин не равна нулю.
сновным
фактором оценки глубины пространства
при бинокулярном зрении является
физиологический параллакс, представляющий
разность дуг на сетчатке глаза (рис.1.1.1),
определяющих положение пары соответственных
точек. Например, А – точка фиксации, то
физиологический параллакс точки В равен
разности дуг а1b1
- a2b2
. При приближении точки В к А наступит
момент, когда наблюдателю будет казаться,
что точки находятся на одинаковом
удалении, хотя в действительности
разность их глубин не равна нулю.
Величиной предельного угла , равного разности параллактических углов двух точек () и соответствующего минимальному физиологическому параллаксу, оценивают остроту бинокулярного зрения первого рода. Величиной разности параллактических углов для двух вертикальных прямых – оценивают остроту бинокулярного зрения второго рода.
р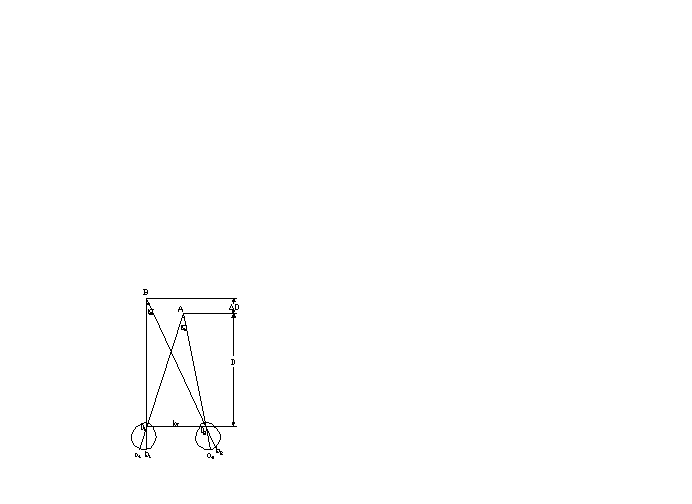 ис.1.1.1
ис.1.1.1
Принято считать, что острота бинокулярного зрения первого рода равна 25’’-30’’, второго рода –10’’, хотя многие люди обладают значительно большей остротой бинокулярного зрения.
Острота монокулярного и бинокулярного зрения у различных наблюдателей и в различных условиях наблюдения колеблется в больших пределах – от нескольких секунд до минут. Существенное влияние на остроту зрения оказывают: освещенность и форма наблюдаемого объекта, контрастность между объектом и фоном, продолжительность наблюдения, индивидуальные особенности наблюдателя, его опыт и ряд других факторов. Приведенные значения остроты зрения являются средними и приняты в фотограмметрии для расчетов.