

1.4. Построение и уравнивание маршрутной и блочной фототриангуляции по методу независимых моделей
В этом методе маршрутная и блочная фототриангуляция строится следующим образом. Сначала по всем смежным (соседним) снимкам в каждом маршруте строятся фотограмметрические модели. Затем определяют элементы внешнего ориентирования каждой модели в системе координат объекта и определяют координаты точек сети в системе координат объекта.
О пределение
элементов внешнего ориентирования
фотограмметрических моделей в системе
координат объекта производят следующим
образом.
пределение
элементов внешнего ориентирования
фотограмметрических моделей в системе
координат объекта производят следующим
образом.
Д ля
каждой связующей точки (находящейся в
зоне тройного перекрытия снимков или
в межмаршрутном перекрытии) измеренной
в двух моделях составляют уравнения:
ля
каждой связующей точки (находящейся в
зоне тройного перекрытия снимков или
в межмаршрутном перекрытии) измеренной
в двух моделях составляют уравнения:
в которых:
а Xi,Yi, Zi и Xj, Yj, Zj – координаты связующей точки в системе координат объекта в i и j моделях.
Для каждой опорной точки измеренной на модели составляются уравнения:
Е
 сли
при аэрофотосъемке с помощью системыGPS
определялись координаты центров проекций
снимков Xsk,Ysk,Zsk
в системе координат объекта, то для
каждого центра проекции составляются
уравнения:
сли
при аэрофотосъемке с помощью системыGPS
определялись координаты центров проекций
снимков Xsk,Ysk,Zsk
в системе координат объекта, то для
каждого центра проекции составляются
уравнения:
В уравнениях Xskмi,Yskмi,Zskмi – координаты центра проекции k-го снимка в системе координат i-ой модели.
Уравнения поправок соответствующие уравнениям (1.4.1) имеют вид аналогичный уравнениям поправок (1.3.3), а уравнения поправок соответствующие уравнениям (1.4.2) и (1.4.3) имеют вид аналогичный уравнениям поправок (1.3.4) (см. раздел 1.3).
В результате решения полученной системы уравнений поправок по методу наименьших квадратов находят уравненные значения элементов внешнего ориентирования всех моделей в системе координат объекта.
Необходимо отметить, что если при аэрофотосъемке были определены с помощью системы GPS координаты центров проекций снимков, то можно построить и уравнять блочную сеть без использования опорных точек на земной поверхности. При построении и уравнивании маршрутной сети необходима, по крайней мере, одна опорная точка.
Это связано с тем, что центры проекции, являющиеся в данном случае опорными точками расположены практически на одной прямой.
П о
определенным значениям элементов
внешнего ориентирования моделей
определяют координаты точек сети в
системе координат объекта:
о
определенным значениям элементов
внешнего ориентирования моделей
определяют координаты точек сети в
системе координат объекта:
Для точек сети и центров проекций снимков, координаты которых были определены по нескольким моделям, в качестве окончательного значения берутся средние значения этих координат.
Значения элементов внешнего ориентирования снимков, определяются следующим образом.
Координаты центров проекции вычисляют по формулам:
(1.4.5)
Угловые элементы внешнего
ориентирования снимков
![]() определяют в два этапа.
определяют в два этапа.
Сначала находят матрицу преобразования координат снимка по формуле:
![]() (1.4.6)
(1.4.6)
где
![]() – матрица поворота, определяющая угловую
ориентацию системы координат снимка
Sxyz
относительно системы координат модели
OMYMXMZM;
АМ
– матрица поворота, определяющая угловую
ориентацию системы координат модели
OMYMXMZM
относительно системы координат объекта
OYXZ.
– матрица поворота, определяющая угловую
ориентацию системы координат снимка
Sxyz
относительно системы координат модели
OMYMXMZM;
АМ
– матрица поворота, определяющая угловую
ориентацию системы координат модели
OMYMXMZM
относительно системы координат объекта
OYXZ.
В формуле1.4.6:
![]() -
матрица преобразования координат,
элементы
-
матрица преобразования координат,
элементы
![]() которой являются функцией угловых
элементов взаимного ориентирования
которой являются функцией угловых
элементов взаимного ориентирования
![]()
![]() - го снимка.
- го снимка.
![]() -
матрица преобразования координат,
элементы
-
матрица преобразования координат,
элементы
![]()
![]() которой являются функцией угловых
элементов внешнего ориентирования
модели
которой являются функцией угловых
элементов внешнего ориентирования
модели
![]() ;
;
По значениям элементов матрицы А вычисляют значения угловых элементов внешнего ориентирования снимка:
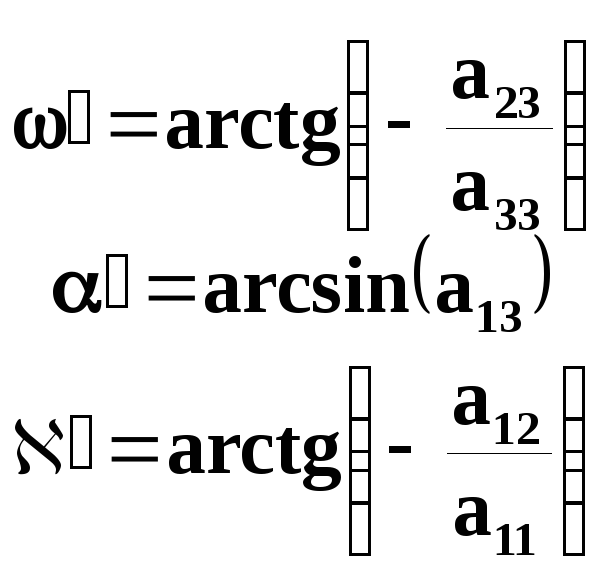
![]() .
(1.4.7)
.
(1.4.7)
Элементы внешнего ориентирования снимков можно определить и из решения обратных засечек по координатам точек сети, определенным в системе координат объекта, и координатам их изображений, измеренных на снимке.
В случае если координаты центров проекций
были определены с помощью системыGPS,
то определяют только угловые элементы
внешнего ориентирования снимков
случае если координаты центров проекций
были определены с помощью системыGPS,
то определяют только угловые элементы
внешнего ориентирования снимков
![]() .
При этом уравнения поправок для обратной
засечки примут вид:
.
При этом уравнения поправок для обратной
засечки примут вид:
Общее количество неизвестных, определяемых при построении сети можно определить по формуле:
![]()
где n – количество независимых моделей.
Общее количество уравнений поправок можно определить по формуле:
![]()
где m – количество связующих точек на смежных стереопарах;
k - количество планово-высотных опорных точек измеренных на моделях;
i - количество плановых опорных точек измеренных на моделях;
l – количество высотных опорных точек измеренных на моделях;
j – количество уравнений поправок составленных для центров проекций, определенных с помощью системы GPS.( j = 6n, где n – количество независимых моделей.)
Для сети изображенной на рис. 1.4.1 состоящей из двух маршрутов, в каждом из которых 4 снимка (3 стереопары):
![]() ,
,
![]()
Если при этом координаты центров проекций были определены системой GPS, то дополнительно составляют j уравнений поправок:
![]()
Таким образом, M=114.
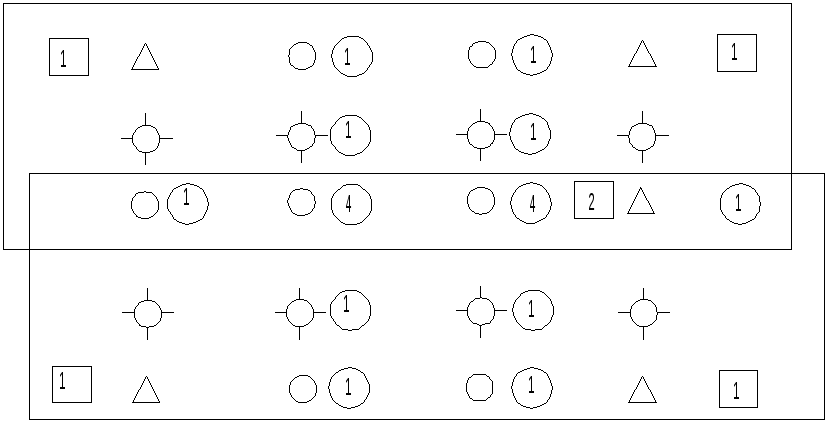
Рис. 1.4.1

 - главная точка
снимка;
- главная точка
снимка;
- точка сети;
точка сети;
 - планово-высотная
точка;
- планово-высотная
точка;

m - количество связующих точек на смежных моделях;
1
Фотограмметрическая обработка данных, полученных системами дистанционного зондирования (ССДЗ)