

2.8. Вращение твердого тела вокруг неподвижной оси
В качестве примера относительно простого поведения вращающегося тела рассмотрим твердое тело (рис. 2.8), которое может вращаться вокруг неподвижной закрепленной оси.
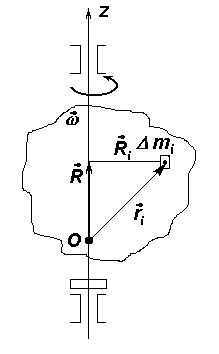
Рис. 2.8. Вращение твердого тела вокруг неподвижной оси
Чтобы удержать
ось от перемещений в пространстве, она
заключена
в подшипники. Опирающийся
на нижний подшипник фланец предотвращает
перемещение оси в вертикальном
направлении. Обозначим сумму внешних
сил, действующих на тело
![]() .
Направим ось OZ
вдоль оси вращения. Выберем на ней
произвольную точку O
и будем определять положение образующих
тело частиц с помощью радиус-векторов
.
Направим ось OZ
вдоль оси вращения. Выберем на ней
произвольную точку O
и будем определять положение образующих
тело частиц с помощью радиус-векторов
![]() относительно этой точки. Вектор
относительно этой точки. Вектор![]() направлен вдоль осиOZ
и его проекции на оси OX
и OY
равны нулю. В этом случае имеем:
направлен вдоль осиOZ
и его проекции на оси OX
и OY
равны нулю. В этом случае имеем:
 (2.8.1)
(2.8.1)
Нетрудно увидеть,
что
![]() ,
где
,
где![]() — радиус окружности, по которойi-ая
частица вращается вокруг оси OZ.
Следовательно, имеем:
— радиус окружности, по которойi-ая
частица вращается вокруг оси OZ.
Следовательно, имеем:
![]() .
(2.8.2)
.
(2.8.2)
По аналогии с
вращением материальной точки (2.8.2)
является произведением угловой скорости
![]() на множитель, представляющий собой
сумму произведений масс точек на квадрат
расстояния до оси вращения
на множитель, представляющий собой
сумму произведений масс точек на квадрат
расстояния до оси вращения![]() .
Это слагаемое называетсямоментом
инерции тела относительно оси.
Естественно, что значение момента
инерции будет зависеть от расположения
оси вращения.
.
Это слагаемое называетсямоментом
инерции тела относительно оси.
Естественно, что значение момента
инерции будет зависеть от расположения
оси вращения.
В заключение приведем сравнительную таблицу основных соотношений для вращательного движения тела с закрепленной осью вращения и поступательного движения материальной точки.
|
Поступательное движение материальной точки |
Вращательное движение твердого тела относительно неподвижной оси |
|
Масса точки
Равнодействующая
внешних сил
Смещение точки
Линейная скорость
точки
Ускорение точки
Количество
движения (импульс)
Кинетическая
энергия
Работа внешних
сил
Уравнение движения точки
|
Момент инерции
относительно оси
Сумма моментов
внешних сил относительно оси
Угол поворота
Угловая скорость
вращения
Угловое ускорение
Момент количества
движения относительно оси
Кинетическая
энергия
Работа внешних
сил
Закон динамики
|
2.9. Моменты инерции некоторых тел
Обратим внимание, что тело обладает моментом инерции безотносительно к вращению. Как покоящееся тело обладает массой, так же оно обладает и моментом инерции. Наличие массы проявляется при поступательном движении, а наличие момента инерции при его вращении. Величина момента инерции зависит от расположения элементарных масс относительно оси вращения. Следовательно, момент инерции можно представить в виде:
![]() .
(2.9.1)
.
(2.9.1)
Осуществляя предельный переход, получаем, что задача вычисления момента инерции, сводится к интегрированию по всему объему тела:
![]() ,
(2.9.2)
,
(2.9.2)
где величины и![]() являются функциями координат.
являются функциями координат.
Очевидно, что вычисление моментов инерции представляет собой сложную задачу, особенно в тех случаях, когда тело неоднородно и имеет неправильную форму. Приемы вычисления моментов инерции некоторых тел проиллюстрируем на следующих простых примерах.