

2. Кинематическое исследование рычажного механизма
Кинематический анализ механизмов заключается в исследовании движения звеньев механизмов при заданном законе движения начального звена. В результате этого анализа определяются положения звеньев и траектории отдельных точек звеньев; линейные скорости отдельных точек и угловые скорости звеньев; линейные ускорения отдельных точек и угловые ускорения звеньев.
При кинематическом исследовании механизма используются различные методы: графический (построение плана положений механизма и траектории отдельных точек), метод построения кинематических диаграмм, графоаналитический (определение скоростей и ускорений отдельных точек).
Последовательность построения планов скоростей и ускорений, а также определения реакций в кинематических парах в силовом расчете устанавливается формулой строения механизма.
2.1. Структурный анализ механизма
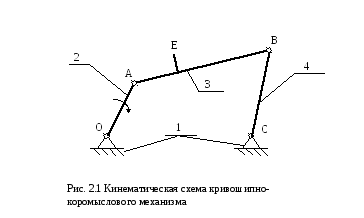
Кинематическая схема кривошипно-коромыслового механизма представлена на рис. 2.1.
 По
кинематической схеме механизма составляем
таблицы его звеньев и кинематических
пар.
По
кинематической схеме механизма составляем
таблицы его звеньев и кинематических
пар.
Таблица 2.1
Звенья механизма
|
№ звена |
Название звена |
Обозначения звена |
Вид движения звена |
|
1 |
Стойка |
ОС |
неподвижное |
|
2 |
Кривошип |
ОА |
вращательное |
|
3 |
Шатун |
АВ |
сложное |
|
4 |
Коромысло |
ВС |
вращательное |
Таблица 2.2
Кинематические пары (кп) механизма
|
Обозначение |
Звенья, составляющие КП |
Вид КП |
Название КП |
Число степеней свободы |
|
О |
1-2 |
низшая |
вращательная |
1 |
|
А |
2-3 |
низшая |
вращательная |
1 |
|
В |
3-4 |
низшая |
вращательная |
1 |
|
С |
4-1 |
низшая |
вращательная |
1 |
Механизм имеет 3 подвижных звена (n=3) и 4 одноподвижные кинематические пары (P1 = 4, P2 = 0).
Число степеней подвижности плоского механизма определяем по формуле:
W = 3n – 2р1 – р2 = 3∙3 – 2∙4 – 0 = 1.
У механизма с одной степенью свободы одно начальное звено. За начальное звено принимаем кривошип, которому от электродвигателя через редуктор передается вращательное движение.
Разделим шарнирный четырехзвенный механизм на структурные группы. Сначала отделяем от механизма начальное звено со стойкой (рис. 2.2). Степень подвижности у этой части механизма равна единице:
W=3n – 2р1 = 3∙1 – 2∙1 = 1,
где n = 1 , Р1= 1.
Оставшаяся часть механизма (рис 2.3) состоит из двух звеньев (шатуна 3, коромысла 4) и 3 вращательных пар (А, В, С), имеет нулевую степень подвижности
W=3n – 2р1 = 3∙2 – 2∙3 = 0.
Она является группой Ассура 2 класса 2 порядка 22(3,4).
Таким образом, шарнирный рассматриваемый 4х-звенник является механизмом второго класса и имеет следующую формулу строения
11(1,2)→22(3,4).
. План положений механизма
Принимаем масштабный коэффициент длин μ = 0,0035 м/мм Находим чертежные размеры звеньев:
ОС = ℓОС / μℓ = 0,55 м/ 0,0035 м/мм = 158 мм,
ОА = ℓОА / μℓ = 0,175 м/ 0,0035 м/мм = 50мм,
АВ = ℓАВ / μℓ = 0,55 м/ 0,0035 м/мм = 158 мм,
ВС = ℓВС / μℓ = 0,325 м/ 0,0035 м/мм = 93мм,
ОS2 = ℓОS2 / μℓ = 0,08 м/ 0,0035 м/мм = 23 мм,
АS3 = ℓАS3 / μℓ = 0,24 м/ 0,0035 м/мм = 68 мм,
ЕS3 = ℓЕS3 / μℓ = 0,125 м/ 0,0035 м/мм = 36 мм,
СS4 = ℓСS4 / μℓ = 0,14 м/ 0,0035 м/мм = 40 мм.
В неподвижной системе координат XOY размещаем элементы кинематических пар O и С стойки 1. Кинематическую пару О с началом координат. Кинематическую пару С располагаем по оси Х на расстоянии ОС.
При построениях используется метод засечек. Из точек O и С проводим дуги окружностей радиусами ОА и СВ. Наиболее удаленно положение коромысла СВО принимаем за нулевое, а другое крайнее положение СВk - за второе крайнее. В этих положениях шатун является продолжением кривошипа (в нулевом положении) или наложением на кривошип (в конечном положении).
Тогда расстояния ОВ0 и ОВк равны:
ОВ0 = ОА + AB = 50 мм + 158 мм =208 мм,
ОВК = АВ − ОA = 158 мм − 50 мм =108 мм.
Находим точки В0 и ВК на дуге радиуса СВ и АО на дуге радиуса ОВ, соединив которые с точками С и О, получим крайние положения коромысла кривошипа и шатуна.
Рабочий угол коромысла, равный углу качания ψ, замеряем на плане механизма между крайними положениями коромысла:
ψ ≈ 1,14 рад.
На звене АВ методом засечек определяются точки S4 и Е, на звене СВ точка S4.