

4. Матрица жесткости кэ
Известные в механике геометрические и физические соотношения для континуальных систем можно записать в виде, аналогичном рассмотренным ранее уравнениям дискретного подхода. Например,
для
дискретной системы: для континуальной
системы: ![]() ,
,![]() ,
,![]() ,
,![]() .
.
Здесь
![]() и
и![]() – вектора деформаций и напряжений, а
– вектора деформаций и напряжений, а![]() и
и
![]() –
матрицы равновесия и податливости
континуальной системы. В отличие от
дискретного подхода, уравнения
континуального подхода удовлетворяются
во всех точках системы.
–
матрицы равновесия и податливости
континуальной системы. В отличие от
дискретного подхода, уравнения
континуального подхода удовлетворяются
во всех точках системы.
При
рассмотрении конечного элемента как
континуальной системы принцип Лагранжа
![]() можно
записать в виде
можно
записать в виде
 ,
,
где левая и правая части представляют возможные работы внутренних и внешних сил, а интегрирование ведется по объему КЭ V.
После этого осуществляется переход к дискретной модели КЭ с использованием матрицы форм H. Тогда после ряда преобразований получается матричное уравнение, связывающее вектор узловых перемещений u с вектором узловых усилий P КЭ:
![]() ,
,
в которой симметричная квадратная матрица
![]()
называется матрицей жесткости конечного элемента. Физический смысл элемента kij этой матрицы – это реакция (реактивная сила), возникающая в i-ом направлении от заданного единичного перемещения в j-ом направлении.
К
примеру, для рассмотренного ферменного
КЭ, находящегося в одноосном напряженном
состоянии, геометрическое уравнение
будет
![]() .
Сравнив его с матричным уравнением
.
Сравнив его с матричным уравнением![]() ,
видим, что матрица равновесия является
дифференциальным оператором с одним
членом, т.е.
,
видим, что матрица равновесия является
дифференциальным оператором с одним
членом, т.е.![]() .
Из уравнения связи между деформацией
и напряжением
.
Из уравнения связи между деформацией
и напряжением![]() видно, что матрица податливости будет
видно, что матрица податливости будет![]() .
.
Для определения матрицы жесткости КЭ вычислим:
 ,
,
 ,
,![]() .
.
Интегрирование
по объему V
сводится к интегрированию по длине l
КЭ, т.к.
![]() (F
− площадь сечения КЭ). Тогда
(F
− площадь сечения КЭ). Тогда
 .
.
При рассмотрении прямоугольного КЭ толщиной t и размерами 2a и 2b с четырьмя узлами i, j, k, m и восемью узловыми перемещениями (рис. 14.4), матрица жесткости будет иметь размеры 8´8.
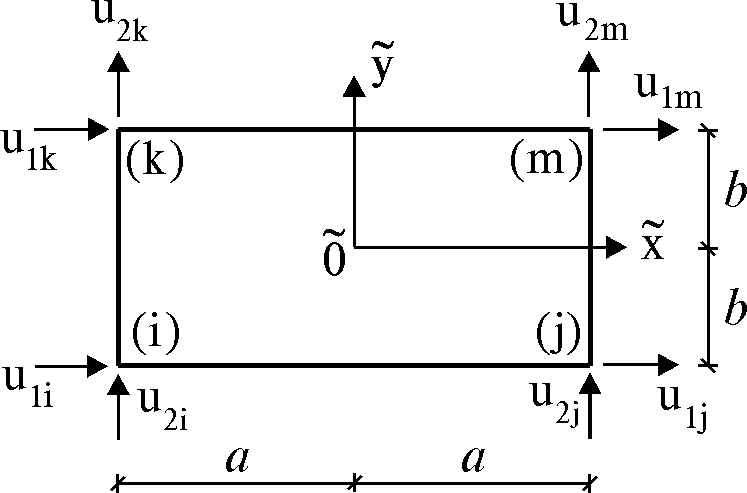
Рис. 14.4
Для краткости записи матрицу жесткости этого КЭ можно представить в блочной форме с 16 блоками одинаковой размерности 2´2:
 .
.
Здесь μ – коэффициент Пуассона. Элементы каждого блока матрицы K определяются по разным формулам. Например,
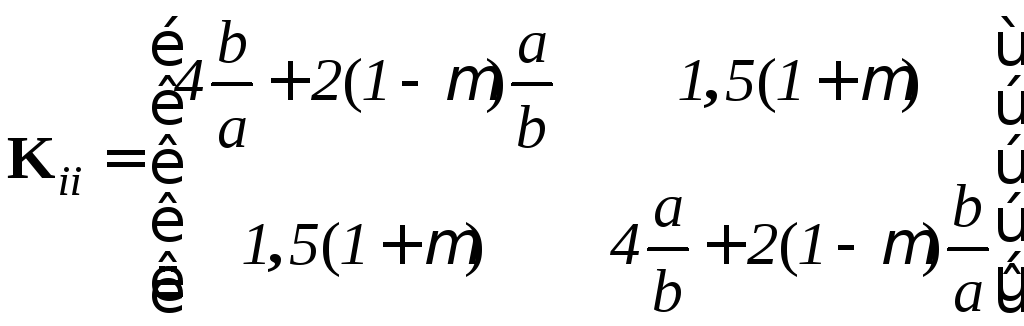 .
.
В о п р о с ы
1. Какой из подходов механики реализуется в МКЭ?
2. Какие основные типы КЭ используются в МКЭ?
3. Как формулируется принцип Лагранжа?
4. Для чего нужны координатные функции и матрицы форм?
5. Что такое функция формы?
6. Как определяется матрица жесткости КЭ?
7. Какой физический смысл имеют элементы матрицы жесткости?
Л е к ц и я 15 расчет сооружений методом конечных элементов (продолжение)
5. Перенос нагрузки в узлы
В расчетной модели сооружения по МКЭ нагрузка должна быть приложена только в узлах. Поэтому действующую на систему внеузловую нагрузку необходимо переносить в узлы.
Порядок переноса нагрузки в узлы расчетной модели в простых случаях остается таким же как и ранее. Например, в стержневых системах используется таблица метода перемещений.
Если к прямоугольному КЭ действует изменяющаяся по линейному закону распределенная нагрузка (рис. 15.1 а), то узловые силы (рис. 15.1 б) определяются по формулам
![]() ,
, ![]() .
.

Рис. 15.1
При переносе объемной нагрузки, например собственного веса четырехугольного КЭ, в каждый узел нужно прикладывать четвертую часть его веса G (рис. 15.1 в). При переносе собственного веса треу-гольного КЭ в каждый узел прикладывается его третья часть (рис. 15.1 г).
В общем случае вектор узловой нагрузки определяется по формуле
![]() .
.