

Lektsia_prostranstvennaya_fototriangulyatsia
.pdf1
ПРОСТРАНСТВЕННАЯ ФОТОТРИАНГУЛЯЦИЯ
1.Назначение и классификация методов пространственной фототриангуляции
2.Маршрутная фототриангуляция методом частично зависимых моделей,
методом независимых моделей
2.1Метод частично зависимых моделей
2.2Метод независимых моделей
3.Блочная фототриангуляция по методу независимых моделей (маршрутов)
4.Построение маршрутной и блочной фототриангуляции по методу связок
5.Требования построения сетей фототриангуляции
1. |
Назначение и классификация методов пространственной |
фототриангуляции
Пространственной фототриангуляцией называют метод камерального сгущения съемочного обоснования путем построения и уравнивания фотограмметрической сети.
Основной целью пространственной фототриангуляции является максимальное сокращение объема полевых геодезических работ.
Фототриангуляция выполняется с целью сгущения опорной геодезической сети по снимкам. В результате фототриангуляции определяются геодезические координаты и высоты опорных точек, необходимых для последующей фотограмметрической обработки стереопар или одиночных снимков на фотограмметрических приборах и системах. В современных аналитических и цифровых фотограмметрических системах в качестве опорной информации для обработки снимков используются определенные в результате построения фототриангуляции значения элементов внешнего ориентирования снимков.
Для построения фототриангуляционной сети нужно выполнить следующие операции:
внутреннее ориентирование снимков;
1
2
взаимное ориентирование снимков;
определение фотограмметрических координат точек модели (построение начального звена);
построение следующего звена (взаимное ориентирование, определение фотограмметрических координат точек) и объединение его с предыдущим по точкам связи в зоне тройного продольного перекрытия;
внешнее (геодезическое) ориентирование маршрутной сети по опорным
точкам и перевычисление фотограмметрических координат точек в систему
местности.
Фототриангуляцию можно разделить на:
-маршрутную, в которой построение сети фототриангуляции производится по снимкам, принадлежащим одному маршруту;
-блочную, в которой сеть фототриангуляции строится из отдельных стереопар или снимков, принадлежащих нескольким маршрутам.
Взависимости от применяемых технических средств:
-аналоговая;
-аналитическая.
Внастоящее время построение фототриангуляции осуществляется только аналитическим методом. В этом методе измерение снимков производится на стереокомпараторах, аналитических и цифровых стереофотограмметрических системах, а построение фототриангуляции производится на компьютерах.
Методы аналитической фототриангуляции:
частично зависимых моделей;
независимых моделей;
способ связок.
2
3
2. Маршрутная фототриангуляция методом частично зависимых
моделей, методом независимых моделей
2.1Метод частично зависимых моделей
взаимное ориентирование первой пары снимков;
передача элементов внешнего ориентирования от левого аэроснимка к правому;
построение первой модели;
построение последующей модели (взаимное ориентирование, передача элементов внешнего ориентирования, определение фотограмметрических координат точек модели и правого центра фотографирования);
приведение модели к масштабу предыдущей;
обработка последующих моделей;
геодезическое ориентирование маршрутной сети.
2.2Метод независимых моделей
Маршрутная фототриангуляция методом независимых моделей выполняется
следующим образом:
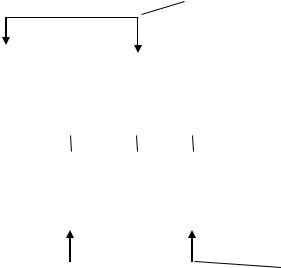
1. Строят независимые модели по смежным (соседним) снимкам
маршрута (рис. 1).
1 модель (Р1-Р2)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р1 |
Р2 |
Р3 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 модель (Р2-Р3)
Рисунок 1
3
|
|
|
|
|
4 |
Построение независимых моделей производится в два этапа. Сначала |
|||||
определяют элементы взаимного ориентирования снимков, а затем строят |
|||||
фотограмметрические модели. |
|
|
|
||
При построении независимых моделей обычно используют систему |
|||||
элементов взаимного ориентирования `1 , `1 , `2 , `2 , `2 , (базисная), а параметры |
|||||
by , bz и `1 |
принимают равными нулю ( by |
bz `1 0 ). |
|||
2. |
Объединяют |
построенные |
модели в модель маршрута, путем |
||
последовательного присоединения моделей к первой модели. В этом случае все |
|||||
точки модели маршрута определяются в системе координат первой модели, |
|||||
которую в дальнейшем будем называть системой координат модели и обозначать |
|||||
Ом Хм Yм Zм. Объединение моделей производят по связующим точкам, общим для |
|||||
двух смежных моделей. |
|
|
|
|
|
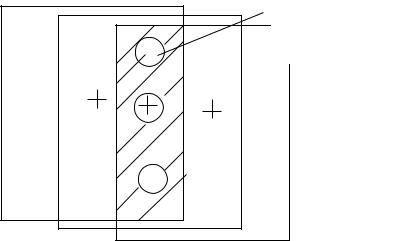
Связующие точки измеряют в зонах тройного перекрытия снимков (рис. 2). |
|||||
|
|
|
|
|
Зона тройного |
|
|
Р1 |
Р2 |
Р3 |
перекрытия |
|
|
|
|
Рисунок 2 |
|
 - связующая точка Построение модели маршрута производится путем последовательного
- связующая точка Построение модели маршрута производится путем последовательного
присоединения моделей к первой модели. Этот процесс выполняется в два этапа.
Сначала определяют элементы внешнего ориентирования присоединяемой модели в системе координат модели маршрута (знаменатель масштаба модели).
i – номер присоединяемой модели (i = 2,3…n).
4
5
Для определения элементов внешнего ориентирования модели необходимо не менее 3 связующих точек. В качестве связующей точки обязательно используется центр проекции S общего для двух соседних моделей снимка.
После определения элементов внешнего ориентирования модели определяют координаты точек присоединяемой модели в системе координат модели маршрута.
Необходимо отметить, что координаты связующих точек и общего для соседних моделей центра проекции снимка S в системе координат модели маршрута определяются дважды (по двум соседним моделям). Разности этих координат X,
Y, являются критерием точности построения модели маршрута и позволяют выявить грубые измерения.
Z |
|
Zм |
|
Yм |
|
|
|
|
|
|
|
|
Y |
|
|
|
|
|
|
|
|
S3 |
Хм |
|
|
|
|
|
|
S1 |
S2 |
X |
S2 |
|
|
|
|
|
|
||
|
|
|
|
3 |
|
|
|
3 |
|
2 |
|
|
2 |
|
1 |
|
|
|
|
|
|
||
|
1 |
|
|
|
|
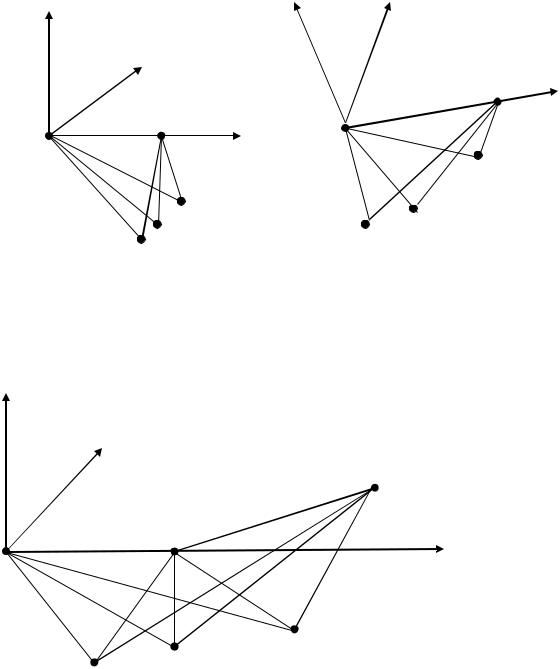
Рисунок 3 В качестве окончательного значения координат точек модели маршрута
берутся их средние значения из двух определений.
На рисунках 3 и 4 приведены иллюстрации процесса объединения моделей.
Z
Y
S3
Рисунок 4
S2 |
X |
S1
2 |
5 3 |
|
|
1 |
|
6
3. Производят внешнее ориентирование модели маршрута по опорным точкам.
Внешнее ориентирование модели маршрута производится по опорным точкам в два этапа.
Сначала определяют элементы внешнего ориентирования модели маршрута
X0 , Y0 , Z0 , M , M , M , t в системе координат объекта OXYZ. Этот процесс полностью аналогичен процессу внешнего ориентирования фотограмметрической модели,
построенной по стереопаре снимков.
После определения элементов внешнего ориентирования модели маршрута вычисляют координаты точек модели маршрута в системе координат объекта.
4. При необходимости устраняют систематические искажения сети по опорным точкам.
3.Блочная фототриангуляция по методу независимых моделей (маршрутов)
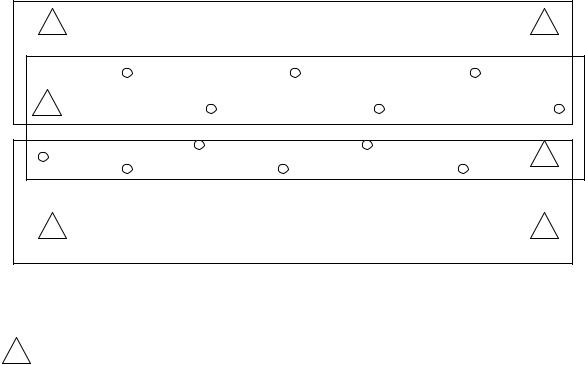
Блочная фототриангуляция по методу независимых маршрутов выполняется
следующим образом. Сначала строят модели маршрутов по методике, изложенной в вопросе 2, а затем объединяют их в блочную сеть по связующим точкам,
расположенным в межмаршрутном перекрытии, с одновременным их внешним ориентированием по опорным точкам (рис. 5):
Рисунок 5
 - связующая точка,
- связующая точка,
6

7
- опорная точка.
4. Построение маршрутной и блочной фототриангуляции по методу
связок
С геометрической точки зрения сеть фототриангуляции по методу связок строится под условием пересечения соответственных проектирующих лучей связок в точках объекта (рис. 6):
S1 |
S2 |
S3 |
|
m1 |
m2 |
l3 |
|
n1 |
n2 |
m3 k3 |
|
S4 |
S5 |
S6 |
|
n4 |
m5 |
l6 |
|
n5 |
m6 |
||
m4 |
L
M K
N
Рисунок 6
В способе связок вся сеть строится и уравнивается одновременно по всем аэро-
фотоснимкам маршрута.
Для каждой точки снимка, которая включается в фотограмметрическую сеть,
составляют два уравнения вида (формулы, выражающие обратную связь между координатами точек снимка и местности), число которых соответственно будет в два раза больше числа взятых точек:
x x0 f
y y0 f
|
a1 |
X Ф X S |
b1 |
YФ YS c1 |
ZФ ZS |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|||||||
a |
X |
Ф |
X |
S |
b |
Y Y |
c |
Z |
Ф |
Z |
S |
|
|||||||||||||
3 |
|
|
|
3 |
|
Ф |
S |
3 |
|
|
|
|
|
|
|
|
|||||||||
|
a2 |
X Ф X S |
b2 |
YФ YS |
c2 |
ZФ ZS |
|
, |
|||||||||||||||||
|
a |
|
X |
Ф |
X |
S |
b |
|
Y Y |
c |
|
Z |
Ф |
Z |
S |
|
|
||||||||
3 |
|
|
|
|
3 |
Ф |
S |
3 |
|
|
|
|
|
|
|
|
|||||||||
где х′, y′ - измеренные по наклонному снимку координаты точки; аi, bi, ci –
направляющие косинусы (косинусы углов между осями координат системы координат наклонного снимка и каждой осью координатной системы горизонтального снимка); XS, YS, ZS - пространственные фотограмметрические координаты центра проекции S (линейные элементы внешнего ориентирования);
7
8
XФ, YФ, ZФ - искомые пространственные фотограмметрические координаты заданной точки местности; f, x0, y0 - элементы внутреннего ориентирования.
Для каждой из связующих точек, находящихся в зонах тройных продольных перекрытий, можно составить, таким образом шесть уравнений (по два уравнения для каждого из трех перекрывающихся снимков).
Способ связок характерен тем, что позволяет построить сеть пространственной фототриангуляции без определения элементов взаимного ориентирования снимков.
5. Требования к построению сетей фототриангуляции
Исходными данными для построения сети фототриангуляции являются:
-диапозитивы аэрофотоснимков изготовленные контактным методом с исходных негативов (аэрофильма) на стеклянных фотопластинах или фотопленке;
-паспорт калибровки фотоаппарата с данными о значениях элементов внутреннего ориентирования  , параметрами дисторсии, координатами координатных меток в системе координат аэрофотоаппарата;
, параметрами дисторсии, координатами координатных меток в системе координат аэрофотоаппарата;
-каталог координат опорных точек и контактные отпечатки снимков с опознанными и наколотыми на них опорными точками. Для каждой опорной точки должен быть составлен абрис и описание места расположения опорной точки.
Составление проекта заключается в выборе и наколе на контактном отпечатке точек сети фототриангуляции необходимых для построения сети.
Кроме того на снимках выбираются и накалываются точки необходимые для последующей фотограмметрической обработки снимков на стереофотограмметрических приборах и трансформирования снимков.
На каждой стереопаре выбираются 12-18 точек, расположенных в стандартных зонах (зона перекрытия), служащих для построения моделей по стереопарам снимков.
В зонах тройного перекрытия снимков выбираются связующие точки.
Оптимальным считается выбор в зоне тройного перекрытия снимков 6-9 точек.
Связующие точки в межмаршрутном перекрытии снимков желательно располагать по разные стороны от середины зоны перекрытия.
8
9
Для построения маршрутных фотограмметрических сетей необходимо, чтобы фактическое продольное перекрытие снимков было порядка 60%. Для блочных фотограмметрических сетей при таком же продольном перекрытии снимков поперечное перекрытие их должно составлять порядка 30% или более.
При выборе точек следует соблюдать следующие требования:
-выбранная точка должна изображаться на возможно большем числе смежных снимков;
-соседние точки должны располагаться на снимке на расстоянии друг от друга не менее 0,05 его базиса;
-точки в зонах тройного, четвертного и т. д. перекрытий снимков желательно располагать не на одной прямой;
-точка, изобразившаяся на нескольких маршрутах, должна быть включена в фототриангуляционную сеть в каждом из них;
-точки не должны располагаться ближе 10 мм от края снимка.
Обработку стереопар следует вести строго последовательно согласно их расположению в маршрутной схеме.
После завершения процесса фототриангулирования по результатам его составляют каталоги координат точек фотограмметрического сгущения, элементов внешнего (а для цифровых систем - и внутреннего) ориентирования снимков и проводят оценку их точности. К каталогу прилагается комплект фотоабрисов точек.
9