

4.2.3. Особенности организации автоматизированного производства
Автоматизированное производство является высшей формой потока. Оно сочетает основные признаки поточного производства с его автоматизацией. Автоматизация исключает непосредственное участие человека в выполнении производственного процесса.
Различают частичную и комплексную автоматизацию. При частичной - рабочий полностью освобождается от работ, связанных с выполнением технологического процесса. В транспортных и контрольных операциях, при обслуживании оборудования, в процессе управления - полностью или частично сохраняется ручной труд. В условиях комплексно-автоматизированного производства - ручное только обслуживание оборудования.
В состав автоматической ПЛ входят автоматы и агрегаты для выполнения технологических операций, механизмы для ориентировки изделия и его закрепления в рабочей позиции, устройства для транспортировки и загрузки изделий по операциям, приборы и аппаратура для контроля и управления процессом и т. д.
В основу проектирования и эксплуатации автоматических поточных линий (в частности, в электронной промышленности, радиотехнической и др.) положен метод блочного конструирования оборудования. Автоматические линии при этом компонуются на базе различного сочетания самостоятельных унифицированных блоков-модулей.
Модуль - конструктивно законченная совокупность узлов и деталей, объединенных общим функциональным назначением и подчиняющихся общим требованиям по габаритам.
Линии, построенные по блочно-модульному методу, надежны в работе, эффективны в эксплуатации, требуют для переналадки немного времени.
При проектировании автоматических поточных линий выполняется ряд расчетов. В значительной степени они аналогичны расчетам неавтоматизированных линий. Вместе с тем имеются и некоторые особенности.
Такт
автоматической ПЛ:
![]()
![]() -номинальный
годовой фонд времени работы линии при
работе в одну смену, час
-номинальный
годовой фонд времени работы линии при
работе в одну смену, час
![]() -число
смен работы
-число
смен работы
![]() -коэффициент
технического использования АПЛ,
учитывающий потери времени при различных
неполадках в работе оборудования линии
и затраты времени на подналадку, зависящий
от количества агрегатов линии.
-коэффициент
технического использования АПЛ,
учитывающий потери времени при различных
неполадках в работе оборудования линии
и затраты времени на подналадку, зависящий
от количества агрегатов линии.
![]() -задание
на выпуск (количество изделий), шт.
-задание
на выпуск (количество изделий), шт.
Если при выполнении какой-либо i-й операции величина нормы времени на ее выполнение больше такта линии, то за такт линии принимают величину нормы времени этой операции.
На автоматических ПЛ особенно сложны расчеты заделов. Заделы на АПЛ создаются на так называемых бункерных линиях:
Компенсирующие
заделы
![]() образуются
в случае, если смежные участки АПЛ имеют
разные такты работы.
образуются
в случае, если смежные участки АПЛ имеют
разные такты работы.
В общем виде:
![]() ,
,
![]() -период
времени для создания компенсирующего
задела (промежуток времени непрерывной
работы смежных участков АПЛ с разными
ритмами работы), мин.
-период
времени для создания компенсирующего
задела (промежуток времени непрерывной
работы смежных участков АПЛ с разными
ритмами работы), мин.
![]() -меньший
и больший ритмы (такты) работы смежных
участков (операций) линии,
-меньший
и больший ритмы (такты) работы смежных
участков (операций) линии,![]() (шт./мин.)
(шт./мин.)
Пульсирующие заделы создаются для поддержания ритмичности выпуска продукции ПЛ. Их назначение состоит в том, чтобы предупредить аритмично хода производственного процесса на отдельных операциях АПЛ.
Автоматические поточные линии
Стремление технологов и организаторов производства осуществить идеальный производственный процесс без применения ручного труда привело к созданию автоматических поточных линий, основанных на кинематической связи рабочих мест.
Автоматическая поточная линия - это система согласованно работающих и автоматически управляемых машин-орудий, транспортных и контрольных устройств, выполняющих в определенной последовательности операции по обработке, контролю и перемещению предметов (деталей) с операции на операцию вплоть до окончания обработки без участия рабочего.
В зависимости от характера обрабатываемых предметов, масштабов и длительности их выпуска автоматические линии можно подразделить на линии, предназначенные для выполнения:
1) части производственного процесса по обработке детали (изделия) в пределах одной технологической стадии;
2) производственного процесса в целом по стадии;
3) процессов всех технологических стадий изготовления изделия от заготовки до сборки.
В первом случае автоматические линии являются лишь частью общей поточной линии по обработке той или иной детали. Они выполняют наиболее простые, но трудоемкие операции, которые поддаются расчленению на более простые, что позволяет использовать специальные станки для выполнения каждой из них. Другие же, более сложные, операции выполняются на обычной линии с применением специального или универсального оборудования. При механической обработке деталей типа тел вращения такой операцией является обычно токарная обработка. Примером может служить поточная линия механической обработки ведущей шестерни заднего моста автомобиля, на которой все операции токарной обработки выполняются на автоматической линии, а остальные - на отдельных агрегатных и универсальных станках.
Линии второго типа предназначены для полного изготовления сравнительно несложных стандартных деталей, выпускаемых в огромных количествах в течение многих лет, например втулок (роликов) цепей.
В третьем случае в общий автоматизированный поток объединяется ряд взаимосвязанных линий, образуя при этом автоматизированный цех или завод.
В машиностроении наибольшее распространение получили автоматические станочные линии для механической обработки деталей в массовых количествах. Такие линии применяются для обработки конкретных деталей и включают станки и автоматы для выполнения технологических операций и все необходимые механизмы и устройства (для фиксации и зажима, поворота и разворота, загрузки, накопления заделов, удаления стружки), а также приборы для контроля и сортировки деталей и аппаратуру для дистанционного управления.
Автоматические станочные линии создаются как из специально сконструированных и изготовленных станков, так и путем компоновки из серийно изготавливаемого оборудования (станков-автоматов, полуавтоматов, агрегатных станков и др.), оснащенного специальными дополнительными агрегатами и механизмами, позволяющими работать в автоматическом режиме.
По характеру кинематической взаимосвязи станков и механизмов автоматические линии подразделяются на линии с жесткой, полужесткой и гибкой связью.
На линиях с жесткой кинематической связью все станки и механизмы связываются в жесткую систему единым приводным межоперационным транспортом, осуществляющим в соответствии с тактом одновременную принудительную передачу всех деталей с операции на операцию. Выход из строя одного станка влечет за собой остановку всей линии.
Линии с полужесткой и гибкой кинематической связью оснащаются независимым межоперационным транспортом, позволяющим передавать детали с операции на операцию независимо одна от другой. После каждой операции (с гибкой связью) или группы их (с полужесткой) установлено специальное устройство для накопления межоперационного задела (накопитель, бункер, магазин), за счет которого осуществляется непрерывная работа последующих станков при остановке одного или группы их на предыдущей операции.
Гибкие автоматизированные производственные системы и робототехника
Гибкая автоматизированная система (ГПС) - это система станков и механизмов, предназначенных для обработки различных конструктивно и технологически сходных деталей небольшими партиями или поштучно без непосредственного участия человека. Составными частями ГПС являются подсистемы: технологическая, транспортно-накопительная, инструментального обслуживания и автоматизированного управления с помощью ЭВМ.
Центральным элементом ГПС является гибкая технологическая система (ГУС), которая представляет собой совокупность многооперационных станков с ЧПУ (типа обрабатывающего центра), непосредственно осуществляющих обработку предметов.
В зависимости от количества станков в ГПС различают: гибкий производственный модуль (ГПМ); гибкую производственную линию (ГПЛ); гибкий производственный участок (ГПУ); гибкое производство цеха (ГПЦ) и завода (ГПЗ).
Гибкий производственный модуль - это технологическая единица оборудования (станок с ЧПУ), оснащенная манипуляторами или роботами для загрузки-выгрузки деталей и магазином для инструмента. Главная особенность ГПМ - возможность работы без участия человека и способность встраиваться в систему более высокого ранга. Гибкая линия состоит из нескольких модулей, оборудованных транспортной и инструментальной системами и управляемых микроЭВМ. Гибкий участок - разновидность ГПЛ; он отличается составом и взаимозаменяемостью технологического оборудования и видом транспорта. Гибкие модуль, линия, участок, представляющие собою самостоятельнее производственные подразделения с взаимосвязанным технологическим оборудованием, являются основными звеньями для построения гибких производств более высокого порядка (цеха, завода).
Транспортно-накопительная подсистема представляет собой совокупность автоматизированных складов заготовок и деталей, накопителей у станков с автоматической загрузкой-выгрузкой и автоматических транспортных средств, служащих для перемещения обрабатываемых предметов со склада к станкам и обратно (роботы-тележки, конвейеры, рольганги и т.д.).
Подсистема инструментального обслуживания включает склады инструментов и приспособлений, отделение подготовки инструмента к работе (заточки, сборки, комплектации магазинов и т.д.) и гибкую автоматизированную систему установки, снятия и перемещения инструмента со складов и обратно.
Подсистема автоматизированного управления - это комплекс технологических средств с ЭВМ, способных воспринимать информацию от автоматизированных систем предприятия: АСУП (календарные планы-графики), САПР (чертеж детали), АСТПП (технологический процесс обработки и контроля детали), преобразовывать ее с помощью управляющих программ, передавать команды непосредственно исполнительным органам оборудования всех подсистем ГПС.
Таким образом, в ГПС функционируют два потока ресурсов: материальный и информационный. Материальный поток обеспечивает выполнение всех основных и вспомогательных операций процесса обработки предметов: подачу заготовок и инструмента и установку их на станках; механическую обработку деталей; снятие готовых деталей и перемещение их на склад; замену инструмента и его перемещение; контроль обработки и состояния инструмента; уборку стружки и подачу смазочно-охлаждающей жидкости. Информационный поток обеспечивает: очередность, сроки и количество обрабатываемых предметов, предусмотренные планами работы ГПС; передачу программ обработки непосредственно исполнительным органам станков, программ работы роботов, установочных и пере кладочных механизмов, программ обеспечения заготовками, инструментом, вспомогательными материалами, программ управления всем комплексом и учета его работы, а также групповое управление станками, транспортно-накопительными механизмами, системой инструментального обслуживания.
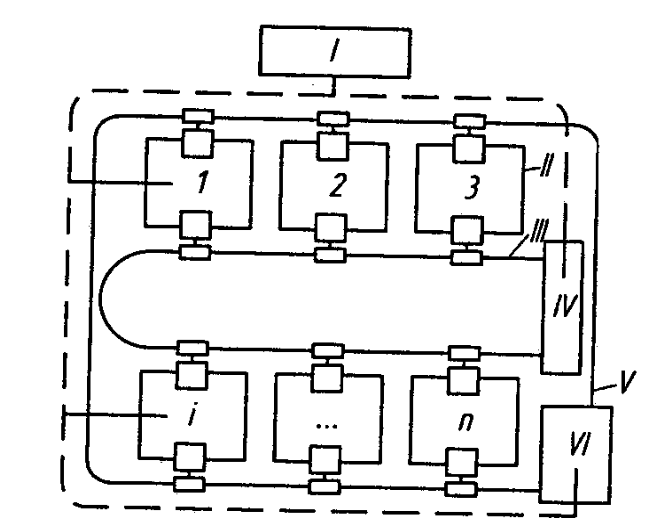
Рис. 19. Схема гибкой производственной системы: 1- управляющий вычислительный комплекс; 11- станки с ЧПУ (1, 2, ..., п); 111- автоматизированная система подачи заготовок и перемещения деталей; 1V - автоматизированный склад заготовок и деталей; V - автоматизированная система инструментального обслуживания; V1- склад инструмента (наладок)
Важнейшее отличие ГПС от производств, построенных по традиционной технологии или с применением автономного оборудования с ЧПУ, - возможность ее интеграции с автоматизированной системой технической подготовки производства (САПР, АСТПП), что позволяет отказаться от использования обычной технической документации (чертежей, спецификаций, технологических процессов и др.) и перейти к безбумажной технологии. Это вносит существенные изменения в структуру кадров по всему циклу проектирование - изготовление продукции, повышает наукоемкость производства, увеличивает долю умственного труда в общих трудовых затратах. ГПС обеспечивают высокую производительность оборудования, приближающуюся к производительности автоматических линий и линий, скомплектованных из специализированных станков.
Главным недостатком ГПС является их высокая стоимость (на один - два порядка выше стоимости универсального оборудования). Поэтому в себестоимости обработки деталей в ГПС основную долю составляют амортизационные отчисления и расходы, связанные с ее эксплуатацией, а в случае применения универсальных станков - затраты на заработную плату работников и цеховые расходы. С ростом объема производства амортизационные отчисления при использовании ГПС остаются относительно постоянными, а заработная плата и расходы на эксплуатацию оборудования будут возрастать на сравнительно не большую величину. При использовании универсального оборудования все затраты увеличиваются пропорционально росту выпуска продукции.
При сравнении эффективности ГПС с эффективностью автономных станков с ЧПУ определяющим фактором экономии является снижение затрат времени на переналадку при переходе к обработке других деталей. Эти затраты времени в случае применения ГПС практически отсутствуют, а при использовании станков с ЧПУ доходят до 50 % общего времени, затрачиваемого на обработку деталей. Благодаря этому потребность в технологическом оборудовании в первом случае уменьшается вдвое, а численность рабочих - еще больше. Это полностью компенсирует дополнительные капитальные затраты, необходимые для приобретения транспортно-накопительного оборудования, системы инструментального обслуживания, управляющего вычислительного комплекса.
Все эти факторы обеспечивают значительное снижение стоимости обработки деталей в ГПС по сравнению с обработкой на автономных станках с ЧПУ при экономии капитальных вложений. Следовательно, при прочих равных условиях (одинаковой номенклатуре закрепленных деталей и полной загрузке) экономические преимущества ГПС очевидны. При высокой степени надежности и работе в безлюдные смены использование ГПС может обеспечить рост производительности труда в 3-5 раз, снизив потребность в производственных площадях в 2-3 раза и сократив незавершенное производство в 8-10 раз.
Как было показано, гибкое автоматизированное производство, основанное на электронной связи механизмов, базируется на широком применении робототехники. Но такая техника эффективна и на линиях с кинематической связью механизмов, и на отдельных станках и операциях.
Основным видом применяемой робототехники является робот - механизм, предназначенный для выполнения главным образом вспомогательных операций производственного процесса (установка, снятие, манипуляции предметом, кантовка, поворот, разворот, контроль, перемещение предмета и др.), осуществляемых автоматически по заданным программе и траектории движения исполнительных механизмов. Применению роботов в машиностроении способствует то обстоятельство, что на предприятиях большинство рабочих движений по изготовлению изделий (а в монтажно-сборочном процессе почти 2/3 общего их количества) имеет чисто манипуляционный, однообразный характер, не требует затрат умственного труда.
Применение роботов эффективно:
при манипуляциях тяжелыми для человека заготовками и деталями в ходе основных операций, а также операций, выполняемых в экологически вредных и дискомфортных условиях (при высокой или низкой температуре, запыленности, загазованности и т.п.);
выполнении однородных, одинаковых, простых, часто повторяющихся действий с одинаковой траекторией движения, выполняемых в высоком темпе (подача, наклон, сталкивание, поворот, съем, разворот, качание, вытягивание и др.);
высокой надежности робота (несколько десятков часов);
низкой стоимости робота, что достигается упрощением и адаптацией его для определенного круга операций и номенклатуры деталей по размерам и массе;
большой программе выпуска (обработки) одинаковых предметов, обеспечивающей сравнительно длительную (не менее одного рабочего дня) работу робота без переналадок;
высоком уровне организации производства и производственной дисциплины.
Там, где при выполнении разнообразных вспомогательных операций приходится постоянно чередовать физические движения и действия с умственными и принимать решения, применение роботов крайне неэффективно, поскольку для таких операций пришлось бы использовать сложные, дорогостоящие и малонадежные роботы, требующие частой и сложной переналадки.