

1.4. Основные элементы сак
1.4.1. Измерительные преобразователи (датчики)
Датчиком называется чувствительный элемент, предназначенный для измерения физической величины и преобразования ее в сигнал, удобный для усиления, передачи на расстояние и воздействия на исполнительный механизм (ИМ) автоматического устройства.
Условное графическое обозначение датчика на функциональной схеме показано на рис. 1.2. Выходная величина датчиков чаще всего
Рис. 1.2. Условное обозначение датчика
На рис. 1.2 Х – входная воспринимаемая и контролируемая физическая величина (температура t, давление р, расход F, уровень L и др.); У – выходная величина (напряжение U, ток I , э.д.с. e), вырабатываемая датчиком, имеет электрическую природу и представляет собой параметр электрической цепи (R, L, C) и э.д.с.
Датчик, преобразующий входную физическую величину в параметр электрической цепи, называется параметрическим, а в э.д.с. – генераторным.
Все
датчики разделяют на измерительные и
релейные. Измерительные датчики имеют
линейную статическую характеристику
![]() (рис. 1.3) и выдают на выходе непрерывный
сигнал.
(рис. 1.3) и выдают на выходе непрерывный
сигнал.
Р ис.
1.3. Статическая характеристика
измерительного
ис.
1.3. Статическая характеристика
измерительного
д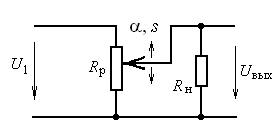 атчика:Х, У– входная и выходная величина
датчика;
атчика:Х, У– входная и выходная величина
датчика;![]() и
и![]() –
приращения входной и выходной величин
–
приращения входной и выходной величин
Р елейные
датчики имеют релейную статическую
характеристику (рис. 1.4) и выдают на
выходе дискретный (прерывный) по уровню
сигнал.
елейные
датчики имеют релейную статическую
характеристику (рис. 1.4) и выдают на
выходе дискретный (прерывный) по уровню
сигнал.
Рис. 1.4. Статическая характеристика релейного датчика
Из релейной характеристики (рис. 1.4) следует, что если входная величина х < х1, то выходная величина у = 0. При х > х1 выходная величина у = у0 и остается неизменной при дальнейшем увеличении х.
Чувствительность датчика выражается как отношение приращения выходной величины к приращению входной величины (рис. 1.3) в установившемся режиме
![]() .
(1.6)
.
(1.6)
Чувствительность датчика графически выражается крутизной его статической характеристики. Чем больше крутизна, тем большей чувствительностью обладает датчик.
1.4.2. Датчики перемещений
Реостатные датчики. Реостатные датчики преобразуют перемещение в изменение электрического сопротивления. Принципиальная схема реостатного датчика представлена на рис. 1.5.
При
перемещении движка реостата (при
изменении
![]() )
изменяется напряжениеUвых.
Чтобы статическая характеристика
датчика была линейной, необходимо
выполнить условие Rн
>>
Rp.
)
изменяется напряжениеUвых.
Чтобы статическая характеристика
датчика была линейной, необходимо
выполнить условие Rн
>>
Rp.
Рис.
1.5. Реостатный датчик: ![]() –
входная величина
–
входная величина
(угловое или линейное перемещение); Uвых – выходная
величина (напряжение); Rp– сопротивление реостата;
Rн– сопротивление нагрузки;U1– напряжение питания
Обмотки реостатов выполняются из сплавов высокого удельного сопротивления: константана, сплавов платины, золота. Для контроля угловых перемещений применяются датчики, каркасы которых выполняются в виде части окружности.
Индуктивные
датчики.
В индуктивных датчиках перемещение
преобразуется в изменение индуктивности
L
или взаимной индуктивности M.
Для примера на рис. 1.6 представлена
принципиальная схема индуктивного
дифференциально-трансформа-торного
датчика.![]()
Рис.
1.6. Принципиальная схема индуктивного
дифференциально-трансформаторного
датчика: S –
входная величина (перемещение плунжера);![]() –
выходная величина (напряжение);U1– напряжение питания (переменное);1– первичная обмотка;2 и3–
секции вторичной обмотки
–
выходная величина (напряжение);U1– напряжение питания (переменное);1– первичная обмотка;2 и3–
секции вторичной обмотки
Параметры
обмоток 2 и
3
одинаковые; включены обмотки встречно.
При перемещении плунжера 4
вверх или вниз меняется коэффициент
взаимоиндукции в обмотках 2
и 3.
Вследствие этого одна из наведенных
э.д.с.
![]() или
или![]() увеличивается,
а другая уменьшается. Так как обмотки2 и
3 включены
встречно,
то на выходе датчика возникает переменная
разность напряжений
увеличивается,
а другая уменьшается. Так как обмотки2 и
3 включены
встречно,
то на выходе датчика возникает переменная
разность напряжений
![]() определенной фазы, которая изменяется
по величине с изменением перемещенияS.
определенной фазы, которая изменяется
по величине с изменением перемещенияS.
К датчикам перемещения также относятся: тензочувствительные, емкостные, фотоэлектрические, электроконтактные и др. Датчики перемещения часто применяются в преобразовательных устройствах датчиков давления, расхода, уровня и др.