

1.5.4. Дифференциальная измерительная схема
Дифференциальные измерительные схемы базируются на дифференциальном методе измерения и работают на переменном токе. Дифференциальная схема (рис. 1.24) представляет собой электрическую цепь, состоящую из двух смежных контуров с одной общей ветвью. В каждом из контуров действуют отдельные ЭДС Е1 и Е2 от вторичных обмоток питающего трансформатора TV.
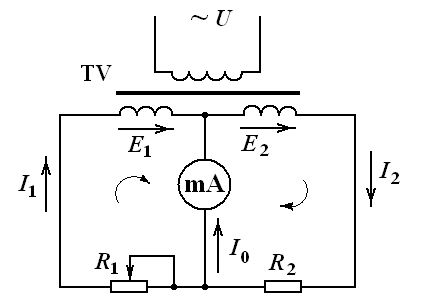
Рис. 1.24. Дифференциальная измерительная схема
Измерительный прибор mA, включенный в общую ветвь обоих контуров, реагирует на разность контурных токов I1 и I2, т.е.
![]() .
(1.19)
.
(1.19)
Внешнее воздействие на дифференциальную схему может передаваться либо на одну из вторичных обмоток трансформатора TV (изменением числа витков), либо на сопротивление R1 или R2. Если внешнее воздействие отсутствует, то ЭДС E1 = E2, сопротивление R1 = R2. Следовательно, и ток I1 = I2. В этот момент времени ток в средней (дифференциальной) ветви отсутствует.
При наличии внешнего воздействия (например, перемещения движка резистора R1) в дифференциальной ветви появится ток I0. Отклонение стрелки миллиамперметра mA будет пропорционально измеряемому внешнему воздействию. По сравнению с мостовой схемой дифференциальная схема обладает большей чувствительностью.
2. Система автоматического управления
2.1. Функциональная схема сау электроприводом
В системах теплоснабжения, вентиляции и кондиционирования воздуха управляющее воздействие на технологический процесс осуществляется путем изменения режима работы отдельных агрегатов, в большинстве случаев оборудованных электрическим приводом. В автоматизированном электроприводе широкое применение находят как дистанционное, так и программное управление электроприводом.
Дистанционное управление обеспечивает возможность обслуживающему персоналу осуществлять воздействие на технологическое оборудование на расстоянии и по своей воле.
Программное управление позволяет осуществлять автоматическое воздействие на технологический процесс по заданной программе.
Функциональная схема САУ электроприводом представлена на рис. 2.1.

Рис. 2.1. Функциональная схема САУ электроприводом:
ЗЭ – задающий элемент;У – усилитель;ИМ– исполнитель-
ный механизм; ОУ – объект управления
2.2. Аппараты автоматического управления и защиты электроприводов
Для управления электроприводом разрабатывается электрическая схема, в которую определенным образом включаются аппараты управления и защиты электроприводов.
Все аппараты можно условно разделить на 3 основные группы: командоаппараты, реле, контакторы и магнитные пускатели.
2.2.1. Командоаппараты
К командоаппаратам относятся устройства, предназначенные для выполнения различных переключений в цепях управления напряжением до 400 В.
К командоаппаратам относятся: кнопки
управления, конечные выключатели,
универсальные переключатели, ключи
управления, ртутные контакты.
командоаппаратам относятся: кнопки
управления, конечные выключатели,
универсальные переключатели, ключи
управления, ртутные контакты.