

3.3. Динамические звенья сар
В процессе работы САР может находиться в статическом или динамическом режиме. Наиболее сложным и важным для САР является динамический режим, когда происходит перемещение регулирующего органа и изменение регулируемого параметра объекта (см. рис. 3.1).
Динамические процессы САР описываются дифференциальными уравнениями, с помощью которых удается провести количественный анализ системы регулирования. Обычно дифференциальные уравнения систем регулирования имеют высокий порядок (4-й, 5-й и более), поэтому всю систему регулирования разделяют на сравнительно простые части (динамические звенья) и с помощью уравнений этих частей не более 2-го порядка составляют дифференциальное уравнение всей системы регулирования.
Динамическим звеном называется часть системы регулирования, описываемая дифференциальным или иным уравнением определенного типа. Отличие элемента от динамического звена состоит в том, что элемент может состоять из нескольких динамических звеньев. Для динамического звена не является обязательным конструктивное или схемное оформление. В отдельных случаях динамическое звено может вообще не иметь физического смысла, характеризуя лишь математические зависимости между некоторыми величинами автоматической системы.
Условное
изображение динамического звена
представлено на рис. 3.8, где ![]() ,
,![]() –входная и выходная
величинызвена,
f
– возмущающее
воздействие.
–входная и выходная
величинызвена,
f
– возмущающее
воздействие.
В
общем случае обе величины ![]() и
и ![]() представляют собой
функции времени.
представляют собой
функции времени.
Рис. 3.8
Статической
характеристикой звена
называется зависимость выходного
сигнала ![]() от входного сигнала
от входного сигнала![]() в установившемся режиме, то есть
в установившемся режиме, то есть
![]() .
.
По виду статических характеристик все элементы (звенья) автоматических систем делятся на линейные и нелинейные звенья. Статическая характеристика линейного звена имеет вид прямой линии (рис. 3.9а)
![]() ,
,
где k – коэффициент передачи звена (или усиления звена).
Обычно статические характеристики элементов и звеньев автоматических устройств нелинейные (см. рис. 3.9 б, в, г). Однако в инженерной практике часто нелинейные характеристики приближенно заменяются линейными (рис. 3.9в). Такое приближение называется линеаризацией.
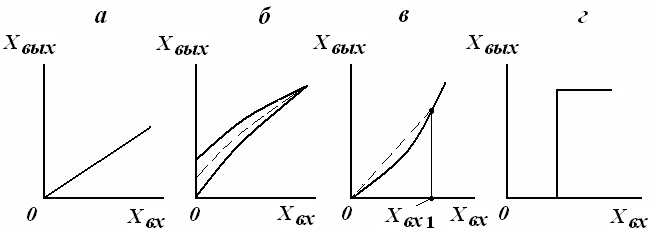
Рис. 3.9. Статические характеристики звеньев
Статическая характеристика полностью характеризует поведение динамического звена в установившихся режимах.
Динамические характеристики выражают зависимость выходной величины от входной в динамическом (переходном) режиме, когда обе эти величины изменяются во времени. Динамические свойства звеньев описываются дифференциальными уравнениями, связывающими входную и выходную величины звеньев во времени.
Например, большинство тепловых объектов описываются дифференциальным уравнением
![]() ,
(3.1)
,
(3.1)
где
![]() – постоянная времени объекта, с;К
– коэффициент
усиления объекта.
– постоянная времени объекта, с;К
– коэффициент
усиления объекта.
Часто
дифференциальные уравнения записывают
в операторной форме. Для этого символ
дифференцирования
![]() заменяют операторным символом
заменяют операторным символом![]() :
:
![]()
![]() ;
;
![]() .
(3.2)
.
(3.2)
Соответственно для операции интегрирования вводятся обратные обозначения
![]() ;
;
![]() и т.д. (3.3)
и т.д. (3.3)
Замена
![]() в дифференциальных уравнениях позволяют
получить выражения, формально совпадающие
с выражениями изображений по Лапласу.
в дифференциальных уравнениях позволяют
получить выражения, формально совпадающие
с выражениями изображений по Лапласу.
В операторной форме записанное дифференциальное уравнение (3.1) будет иметь вид
![]() (3.4)
(3.4)
или
![]() .
(3.5)
.
(3.5)
Символ
![]() можно
рассматривать как обычный множитель и
производить над ним все математические
преобразования: выносить за скобку,
сокращать и т.п. Операторная форма
обозначения сокращает объем записи,
упрощает промежуточные математические
выражения при анализе систем регулирования.
можно
рассматривать как обычный множитель и
производить над ним все математические
преобразования: выносить за скобку,
сокращать и т.п. Операторная форма
обозначения сокращает объем записи,
упрощает промежуточные математические
выражения при анализе систем регулирования.
Общее и полное выражение динамических и статических свойств звена дается его передаточной функцией.
Передаточная функция – это отношение, записанных в операторной форме, выходной величины звена к входной при нулевых начальных условиях
![]() .
(3.6)
.
(3.6)
Передаточную функцию теплового объекта можно получить из операторного уравнения (3.5)
![]() ,
(3.7)
,
(3.7)
где К – коэффициент усиления, характеризующий статические свойства объекта; Т – постоянная времени, характеризующая динамические свойства объекта.
Любое исследование звена (объекта) в конечном счете, сводится к определению его передаточной функции.
Частотные характеристики звеньев. В реальных системах часто входные сигналы звеньев или систем изменяются по гармоническому закону заданной амплитуды и частоты. В таких случаях параметры колебаний на выходе звена с помощью переходной характеристики получить трудно. В тоже время частотный метод позволяет получить выходные параметры звена при любом входном периодическом сигнале.
При подаче на вход звена гармонического сигнала
![]() (3.8)
(3.8)
получаем на выходе звена сигнал
![]() ,
(3.9)
,
(3.9)
где
A
и B
– амплитуды
входного и выходного сигналов;
![]() –
угловая частота;T
– период колебаний;
–
угловая частота;T
– период колебаний;
![]() – фазовый сдвиг между входными и
выходными колебаниями.
– фазовый сдвиг между входными и
выходными колебаниями.
Выражения (3.8) и (3.9) можно представить в виде графиков (рис. 3.10)
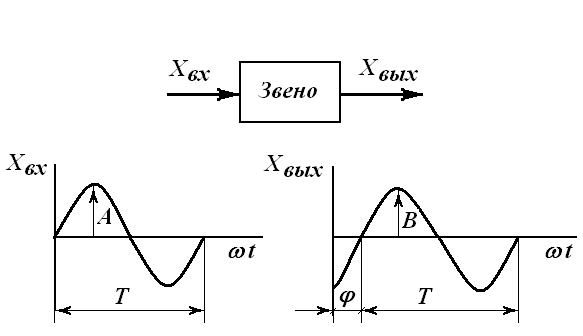
Рис. 3.10.
При
значении
![]() амплитудаB
и фаза
амплитудаB
и фаза
![]() зависят от частоты
зависят от частоты![]() .
Если постепенно увеличивать от нуля
.
Если постепенно увеличивать от нуля![]() ,
определяя установившиеся значенияB
и
,
определяя установившиеся значенияB
и
![]() для разных частот при фиксированном
значенииА,
то можно
получить зависимости
для разных частот при фиксированном
значенииА,
то можно
получить зависимости
![]() и
и
![]() , (3.10)
, (3.10)
где
![]() – амплитудно-частотная характеристика;
– амплитудно-частотная характеристика;![]() –
фазовая частотная характеристика.
–
фазовая частотная характеристика.
Синусоидальные
величины ![]() и
и ![]() (рис. 3.10) можно
представить в виде вращающихся векторов
на комплексной плоскости (рис. 3.11).
(рис. 3.10) можно
представить в виде вращающихся векторов
на комплексной плоскости (рис. 3.11).
Вращающийся вектор синусоидальной величины можно представить на комплексной плоскости комплексным числом, представленным в показательной, тригонометрической и алгебраической форме. Переход от одной формы записи к другой осуществляется с помощью формулы Эйлера
![]() .
(3.11)
.
(3.11)
Тогда
![]() и
и ![]() можно представить
в виде
можно представить
в виде ![]() (3.12)
(3.12)
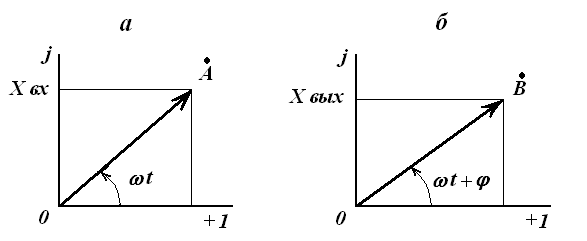
Рис. 3.11
При
определении передаточной функции
![]() воспользуемся комплексными числами
векторов
воспользуемся комплексными числами
векторов![]() и
и![]() ,
записанными в показательной форме. При
этом сделаем замену
,
записанными в показательной форме. При
этом сделаем замену![]() .
Тогда
.
Тогда
![]() ,
(3.13)
,
(3.13)
а
так как величины
![]() и
и![]() зависят от
зависят от![]() (приА
= const),
то час-
(приА
= const),
то час-
тотная
передаточная функция будет иметь вид
 (3.14)
(3.14)
г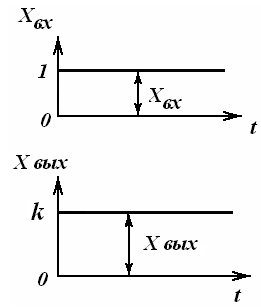 де
де![]() – вещественная частотная характеристика;
– вещественная частотная характеристика;![]() –
мнимая частотная характеристика.
–
мнимая частотная характеристика.
Таким
образом, подставляя в выражение для
передаточной функции
![]() в место
в место![]() комплексную
величину
комплексную
величину![]() ,
можно получить однозначную зависимость
между передаточной функцией и частотными
характеристиками звена. Величина
,
можно получить однозначную зависимость
между передаточной функцией и частотными
характеристиками звена. Величина![]() называется амплитудно-фазовой частотной
характеристикой (АФЧХ).
называется амплитудно-фазовой частотной
характеристикой (АФЧХ).
Частотные
характеристики позволяют сократить
объем вычислительной работы при анализе
САР и нашли широкое применение на
практике при оценке устойчивости и
качества систем регулирования.![]()