

ЛС_конспект лекций
.pdfУсловные обозначения: ВМ (РС) – вычислительная машина (рабочая станция); СР – сервер;
КС - консоль (терминал, в состав которого, как правило, входит: клавиатура и монитор, то есть устройства позволяющие осуществлять взаимодействие пользователя с компьютерной системой);
СКР - сканер; ХАБ - концентратор (коммутатор);
СК - сетевая карта (сетевой адаптер); ИМ - исполнительный механизм (транспортный робот, тележка и т.п.);
КР - программируемый контроллер (бортовой компьютер); Д - датчик (средство ориентации ИМ); М - мотор (двигатель).
71

Системы поиска заданной позиции
Любой груз, размещаемый на складе, устанавливают по определённому адресу. Для этого используется декартовая система координат. Адресация содержит:
∙две координаты, если груз размещается в одной плоскости (например, напольное хранение);
∙три координаты, если груз размещается в объёме склада
(например, при штабельном или стеллажном хранении). При поступлении груза на склад ему присваивается адрес
хранения. Для складирования в первом случае – при напольном хранении - наносится разметка на полу, рис. 14.2.
X
n
) |
n-1 |
|
|
|
|
|
|
|
|
|
(стеллажии |
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
т э к |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
с |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y
0 |
1 |
2 |
3 |
4 |
5 |
6 7 8 9 10 |
11 |
12 |
13 |
n 1 |
n |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
р я д ы (фасад) |
|
|
|
|
|
Рис. 14.2. План разметки площадки складирования для штучных грузов
Для поиска места (адреса) размещения груза в складе используется складская адресация мест размещения грузов.
Следует различать складскую адресацию для размещения грузов:
∙в штабелях;
∙в стеллажах.
72
Для штабельного размещения используют следующую адресацию (рис. 14.2):
∙ряд (координата "X") - символьное обозначение - r;
∙стэк (координата "Y") - символьное обозначение - s;
∙слой (координата "Z") - символьное обозначение - q.
Для размещения грузов в стеллажах следующая адресация
(рис. 11.5):
∙ стеллаж (координата "X") - символьное обозначение
-s (spread);
∙ряд (координата "Y") - символьное обозначение - r (row);
∙ярус (координата "Z") - символьное обозначение - t (tier).
Системы позиционирования
Наиболее часто используют следующие методы позициони-
рования:
∙позиционный;
∙кодово-позиционный;
∙счётный.
Утверждение, что "на складе все имеет своё место …" [2] следует преобразовать на утверждение, что на современном складе каждая складская единица должна иметь свой адрес. В современных складах для размещения грузов на складе используется различные системы адресации.
14.1. Система поиска заданной позиции
В системах управления ПТМ с использованием средствами вычислительной техники важно найти наилучший метод поиска адреса местоположения груза в складе. Это может быть адрес размещения груза на конвейере, в ячейке стеллажа, в месте передачи груза с одного транспортного средства на другое (передаточный стол, ячейка передачи груза с передаточной тележки на кран-штабелёр и т.п.).
73
В настоящее время поиск заданной позиции (адреса) осуществляется различными методами [4, 7]. Из них наибольшее распространение получили: позиционный, счетный (счетноимпульсный), позиционнокодовый (кодовый).
Здесь адрес - это координаты места перегрузки пакета тарноштучных грузов или пустого поддона. Адрес является ориентиром, позволяющим устройству управления перемещать грузозахват (грузонесущий орган) стеллажного робота в место перегрузки. С помощью адреса осуществляется перемещение грузозахвата по координатам X, Y, Z в зоне действия стеллажного робота.
Для считывания информации используются аналоговые, аналогово-цифровые, цифровые и дискретные датчики. Информация от датчиков, после соответствующих преобразований, поступает в систему, как правило, в дискретном представлении. Системы с дискретным представлением обрабатываемой информации, как правило, сложнее аналоговых систем, однако по сравнению с последними имеют ряд преимуществ: высокую помехоустойчивость, принципиально неограниченную точность представления информации в цифровом виде, объективность цифрового воспроизведения показаний, удобство согласования систем телеуправления с цифровыми системами обработки данных.
Для выбора наиболее рационального метода поиска адреса следует проанализировать ряд критериев характеризующих сравниваемые методы. Базовыми критериями при анализе являются:
1.Время наработки на отказ.
2.Требования к обслуживанию.
3.Чувствительность к окружающей среде.
4.Надежность функционирования.
5.Помехоустойчивость.
6.Стоимость.
При сравнении различных методов позиционирования предпочтение отдано бесконтактным дискретным устройствам считывания позиционной информации, так как при использовании контактных элементов надежность такого рода систем на один – два порядка ниже бесконтактных. В то время как бесконтактные датчики практически не зависят от количества срабатываний, а в процессе позиционирования выдают дискретные сигналы, кото-
74
рый хорошо согласуется с цифровыми элементами компьютеров, для аналоговых датчиков требуются достаточно сложные анало- го-дискретные преобразователи.
Кроме того, следует отметить, что предлагаемый в данной работе, в качестве базового, метод позиционирования носит дискретный характер. Поэтому не рекомендуется использовать в качестве устройств считывания информации такие аналоговые устройства как потенциометры, сельсины, поворотные трансформаторы, которые выдают сигналы в виде однозначной непрерывной функции контролируемой величины. К недостаткам аналоговых систем относятся также трудности создания следящих систем на аппаратном уровне. Следящие системы сложны, громоздки, и недостаточно надежны из-за большого количества последовательно соединяемых элементов.
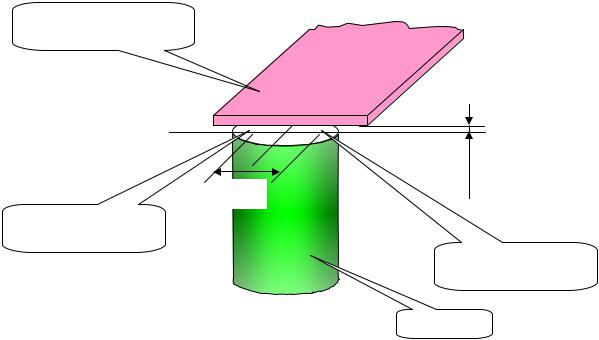
шунт (позиционная метка)
∙ ∙
z
dZ
точка срабатыва-
ния датчика τ1
точка срабатывания датчика τ2
датчик
Рис. 14.3. Схема взаимодействия датчика с шунтом
где z - рабочий зазор между датчиком и шунтом;
dZ - дифференциал хода датчика по величине рабочего зазора z.
75

Примечание: Далее все рассматриваемые ниже методы позиционирования используют бесконтактные датчики считывания информации.
14.2. Обоснование целесообразности применения счётной системы поиска по координатам Y, Z.
Ниже рассматриваются методы поиска получившие наибольшее распространение:
Позиционный метод – выход движущегося элемента системы в заданную позицию определяется с помощью датчика, установленного на этой позиции, при воздействии на этот датчик шунта (позиционного репера, метки), размещенного на движущемся элементе (рис. 14.4).
Примечание: Движущимися элементами в стеллажном роботе являются, как собственно стеллажный робот, так и подъёмник, тележка, поворотный круг, платформа грузозахвата.
Позиционно-кодовый метод – выход движущего элемента системы в заданную позицию определяется по идентификатору– отличительному уникальному коду, позволяющему однозначно идентифицировать конкретную позицию. Для реализации этого метода на подвижном элементе поисковой системы устанавливается блок датчиков для считывания кода, а на каждой позиции – блок шунтов (реперов) или метка штрихового кода (рис. 3.2).
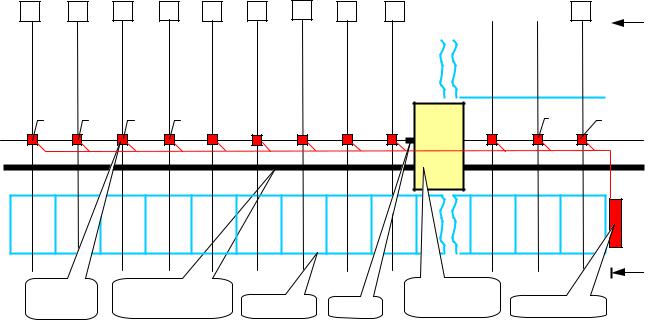
Счетный метод (предлагается в качестве базового)- выход движущего элемента системы в заданную позицию определяется по числу, записанному в счетчике позиций. При этом на каждой позиции устанавливается по одному шунту, а датчик счета позиций, установленный на движущемся элементе системы, при взаимодействии с шунтами позиций выдает дискретные сигналы, которые алгебраически суммируются счетчиком (рис. 3.3).
76
Номер ряда в стеллаже (координата Y)
0 |
|
1 |
|
|
2 |
|
|
3 |
|
|
4 |
|
5 |
|
6 |
|
|
7 |
|
|
8 |
|
|
|
|
|
n-2 |
|
n-1 |
n |
|
А |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Д0 |
Д1 |
Д2 |
Д3 |
Дn-1 |
Дn |
А
Датчик |
Подкрановый |
Стеллаж |
|
Стеллажный |
|
позиции |
путь |
Шунт |
робот |
Контроллер |
Рис.14.4. Схема расположения датчиков и шунтов в зоне стеллажного хранения грузов. Позиционный метод.
77

Номер ряда в стеллаже (координата Y)
0 |
|
1 |
|
|
2 |
|
|
3 |
|
|
4 |
|
5 |
|
6 |
|
|
7 |
|
|
8 |
|
|
|
|
|
n-2 |
|
n-1 |
|
n |
|
|
А |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

 Д20
Д20

 Д21
Д21

 Д22
Д22
 Д23
Д23 
 Д24
Д24


 ДС
ДС
А
Подкрановый |
Стеллаж |
Датчик |
Блок |
|
позиций |
шунтов |
|||
путь |
||||
|
Строб шунт |
Стеллажный |
Контроллер |
|
|
|
робот |
||
|
|
|
Рис. 14.5. Схема расположения датчиков и шунтов в зоне стеллажного хранения грузов. Кодово-позиционный метод.
Условные обозначения:
Д20 – Д24 – датчики идентификации;
ДС – строб-датчик.
78

Номер ряда в стеллаже (координата Y)
Номер яруса в стеллаже (координата Z)
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
n-2 n-1 |
n |
А |
|
|
|
|
|
|
|
|
|
|
Д20 |
|
|
|
|
|
|
|
|
|
|
|
|
Д21 |
|
|
|
|
|
|
|
|
|
|
|
|
ДРИ1 |
|
|
|
|
|
|
|
|
|
|
|
|
ДРИ2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
|
Подкрановый |
Датчик |
|
Стеллажный |
Контроллер |
Шунт |
|
|||||
|
|
путь |
|
позиций |
|
робот |
|
|
||||
|
|
|
А - А |
|
|
|
|
|
Б - Б |
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
ДЛ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Шунт |
|
|
|
ДСЛ |
|
n-1 |
|
|
|
|
|
|
крайнего |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
полож. ГЗ |
|
|
|
|
|
n-2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Шунт |
|
|
|
|
|
|
|
|
|
|
|
|
исходного |
|
|
|
|
|
3 |
|
|
|
|
|
|
полож. ГЗ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
Б |
|
Б |
|
|
ДЛ |
ДСЛ |
|
|
||
|
|
|
|
|
|
|
|
|||||
1 |
|
дян |
|
|
|
|
|
|
|
|
|
|
|
|
дяч |
|
|
|
|
|
|
Платформа |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
стеллажного |
|
||
Стеллажный |
|
Грузозахват |
|
|
робота |
|
|
|||||
|
|
|
|
|
|
|
||||||
|
робот |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 14.6. Схема расположения датчиков и шунтов в зоне стеллажного хранения грузов. Счетный метод.
79
Вкачестве конкретного примера ниже приведены данные по сравниваемым методам поиска - по количеству используемых элементов и интенсивности отказов/вероятности сбоев, см.
табл.14.1.
Вэтой таблице в качестве исходных данных для сравнения взяты реальные данные, используемые на ряде объектов с рассматриваемыми системам позиционирования по координате "Y" (поиск рядов в стеллаже). Как правило, в современных системах число позиций по координате "Y" колеблется от 45 до 210, поэтому для сравнения взята средняя величина – 127 позиций.
Таблица 14.1 Данные по сравниваемым методам поиска (координата Y)
№ |
|
|
Метод поиска |
|
|
Сравниваемые показатели |
|
|
|
|
|
Позици- |
Позиционно- |
|
|
||
п/п |
|
Счётный |
|||
|
|
||||
|
|
онный |
кодовый |
|
|
1 |
Количество датчиков |
127 |
7 |
|
1 |
2 |
Количество шунтов |
1 |
1 - 7 |
|
1 |
3 |
Интенсивность отказов Λ, ч-1 |
0.38 |
0.021 |
|
0.003 |
(при λ = 30-3 ч-1) |
|
||||
|
1 |
|
|
|
|
4 |
Безотказность узла позиционирования P(t) |
0.62 |
0.79 |
|
0.997 |
В результате проведенного анализа сделан выбор наиболее рационального метода системы поиска - это наиболее простой и надежный счетный метод поиска заданной позиции. Достоинст-
во этого метода - наличие одного шунта на каждой позиции и одного датчика счета позиционных меток (шунтов). В реальной системе поиска рекомендуется использовать дублирование датчиков счета позиций, что обеспечит высокую отказоустойчивость системы.
Преимущества счетного метода по сравнению с позицион- но-кодовым:
∙не требуется обслуживания средств очувствления, при условии использования бесконтактных электромагнитных датчиков;
∙существенно упрощается наладка системы автоматического управления (САУ), так как установить и отрегулировать один шунт на каждой позиции гораздо проще, чем блок шунтов (4-8 шт.), используемый в случае кодово-
80